TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024053996
公報種別
公開特許公報(A)
公開日
2024-04-16
出願番号
2022160553
出願日
2022-10-04
発明の名称
縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法
出願人
オムロン株式会社
,
株式会社松屋アールアンドディ
代理人
弁理士法人太陽国際特許事務所
主分類
D05B
19/16 20060101AFI20240409BHJP(縫製;刺しゅう;タフティング)
要約
【課題】縫製前の被縫製材を立体形状に固定しなくても、被縫製材を立体的に縫製することができる。
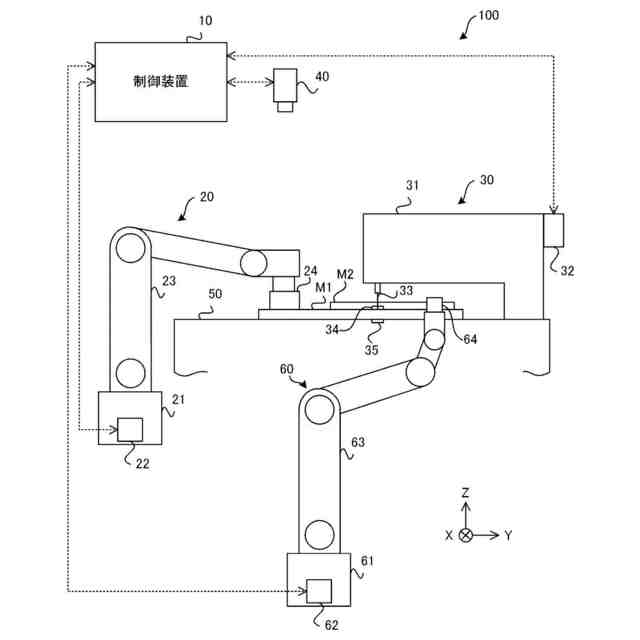
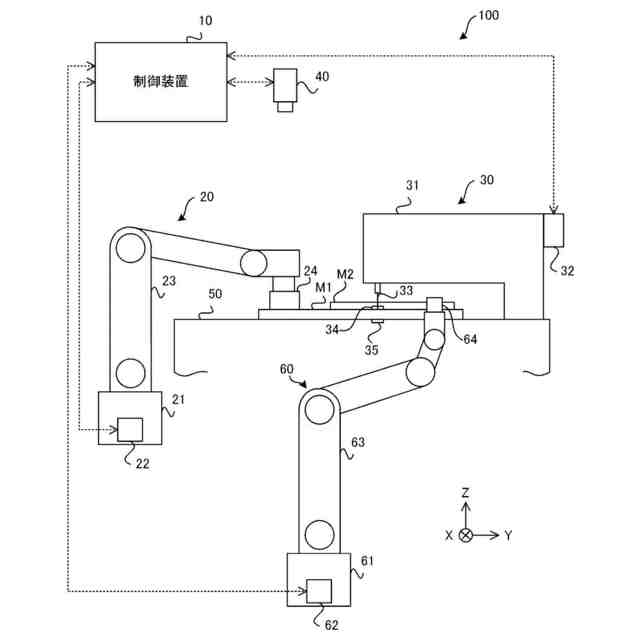
【解決手段】縫製システムは、重ね合わされた第1の被縫製材及び第2の被縫製材を縫製する縫製装置と、前記第1の被縫製材及び前記第2の被縫製材を保持するロボットと、前記縫製装置と前記ロボットとを制御し、前記第1の被縫製材に対して前記第2の被縫製材を傾けた状態で保持し、縫製されるように前記ロボットを制御する制御装置と、を含む。
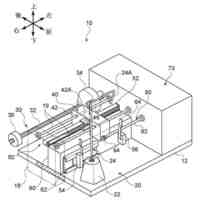
【選択図】図1
特許請求の範囲
【請求項1】
重ね合わされた第1の被縫製材及び第2の被縫製材を縫製する縫製装置と、
前記第1の被縫製材及び前記第2の被縫製材を保持するロボットと、
前記縫製装置と前記ロボットとを制御し、前記第1の被縫製材に対して前記第2の被縫製材を傾けた状態で保持し、縫製されるように前記ロボットを制御する制御装置と、
を含む縫製システム。
続きを表示(約 1,500 文字)
【請求項2】
前記制御装置は、前記第2の被縫製材の保持位置が、前記縫製装置の縫製点へ送る手前の位置であり、当該保持位置において前記第1の被縫製材に対して傾けた状態で保持するように前記ロボットを制御する、請求項1に記載の縫製システム。
【請求項3】
前記制御装置は、前記第1の被縫製材が、縫製点を囲む位置で、縫製される被縫製材を受けて支える面と平行に沿うように前記ロボットを制御する、請求項1に記載の縫製システム。
【請求項4】
被縫製材同士を曲面状に重なった状態に縫い上げる場合において、曲面状の突出する側を前記第1の被縫製材とし、曲面状のくぼむ側を前記第2の被縫製材として縫製することとし、
前記制御装置は、曲面状の突出する側に位置する前記第1の被縫製材に対して、曲面状のくぼむ側に位置する前記第2の被縫製材を傾けた状態で保持し、縫製されるように前記ロボットを制御する、請求項1に記載の縫製システム。
【請求項5】
前記制御装置は、前記第2の被縫製材を傾けて保持するように前記ロボットを制御すると共に、前記縫製装置の有する押さえ部を間欠的に上下させるように制御する、請求項1に記載の縫製システム。
【請求項6】
前記ロボットを、前記第1の被縫製材を保持する第1のロボットと、前記第2の被縫製材を保持する第2のロボットの各々とし、
前記制御装置は、前記第1の被縫製材が、縫製点を囲む位置で、縫製される被縫製材を受けて支える面と平行に沿うように前記第1のロボットを制御すると共に、前記第1の被縫製材に対して前記第2の被縫製材を傾けた状態で保持し、縫製されるように前記第2のロボットを制御する、請求項1に記載の縫製システム。
【請求項7】
重ね合わされた第1の被縫製材及び第2の被縫製材を縫製する縫製装置と、前記第1の被縫製材及び前記第2の被縫製材を保持するロボットとを制御することをコンピュータが実行する制御方法であって、
前記第1の被縫製材に対して前記第2の被縫製材を傾けた状態で保持し、縫製されるように前記ロボットを制御する、
制御方法。
【請求項8】
重ね合わされた第1の被縫製材及び第2の被縫製材を縫製する縫製装置と、前記第1の被縫製材及び前記第2の被縫製材を保持するロボットとを制御することをコンピュータに実行させる制御プログラムであって、
前記第1の被縫製材に対して前記第2の被縫製材を傾けた状態で保持し、縫製されるように前記ロボットを制御する、
制御プログラム。
【請求項9】
重ね合わされた第1の被縫製材及び第2の被縫製材を縫製する縫製装置と、前記第1の被縫製材及び前記第2の被縫製材を保持するロボットと、を制御する制御部、を含み、
前記制御部は、前記第1の被縫製材に対して前記第2の被縫製材を傾けた状態で保持し、縫製されるように前記ロボットを制御する、
制御装置。
【請求項10】
重ね合わされた第1の被縫製材及び第2の被縫製材を縫製する縫製装置と、前記第1の被縫製材及び前記第2の被縫製材を保持するロボットとを制御することをコンピュータに実行させる制御プログラムを記憶した非一時的記憶媒体であって、
前記第1の被縫製材に対して前記第2の被縫製材を傾けた状態で保持し、縫製されるように前記ロボットを制御する、非一時的記録媒体。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
また、特許文献1には、ロボットアームにミシンを搭載した縫製システムが記載されている。この縫製システムは、ミシンと、縫製の基準位置を撮影するカメラと、ミシンとカメラを保持するロボットアームと、制御装置とを備える。制御装置は、ミシンの針落ちにより第一の針落ち位置を形成し、制御装置が記憶する針中心位置を通る回動軸回りに規定の角度でミシンを回動させてから、ミシンの針落ちにより第二の針落ち位置を形成する動作制御を行い、さらに、第一の針落ち位置と第二の針落ち位置とをカメラで撮影して得られた撮影画像の撮影範囲内の第一の針落ち位置と第二の針落ち位置の各位置に基づいて、制御装置が記憶する針中心位置を較正する較正処理を実行する。
【先行技術文献】
【特許文献】
【0003】
特開2018-042882号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
被縫製材を立体形状に縫製するためには、上記特許文献1に記載の技術のように、被縫製材を立体形状の型に装着して固定する必要がある。つまり、被縫製材を立体的に縫製するには、立体形状の型を予め用意しておく必要があった。
【0005】
本開示は、上記の点に鑑みてなされたものであり、縫製前の被縫製材を立体形状に固定しなくても、被縫製材を立体的に縫製することができる縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、第1態様に係る縫製システムは、重ね合わされた第1の被縫製材及び第2の被縫製材を縫製する縫製装置と、前記第1の被縫製材及び前記第2の被縫製材を保持するロボットと、前記縫製装置と前記ロボットとを制御し、前記第1の被縫製材に対して前記第2の被縫製材を傾けた状態で保持し、縫製されるように前記ロボットを制御する制御装置と、を含む。
【0007】
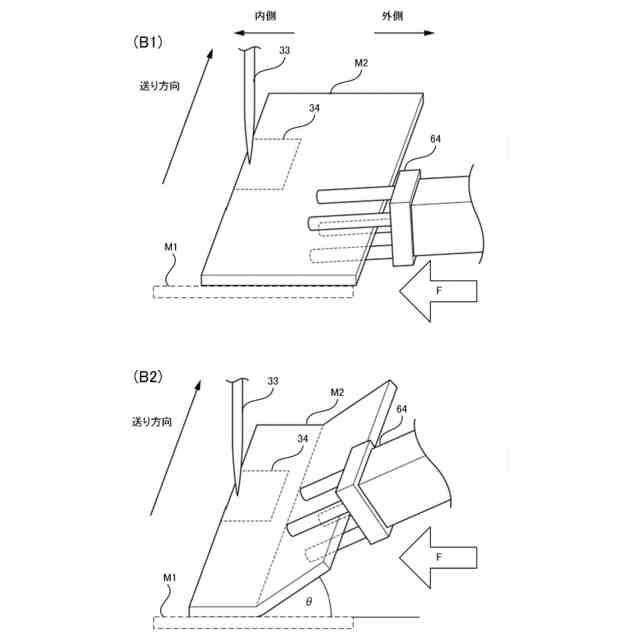
なお、第1の被縫製材に対して第2の被縫製材を傾けた状態で保持し、縫製される態様には、縫い付けようとしている2つの被縫製材の糸が通されるそれぞれの部分について、互いに傾いた状態とされ、当該部分に糸が通されることで縫製されることを含む。また、当該態様には、縫製するために糸を通す前、重ね合わされている2つの被縫製材から離れた位置(上側)に縫い針が位置している状態で、第1の被縫製材の縫われる部分に対して第2の被縫製材の縫われる部分が傾いた状態とされ、縫い針が糸を通して縫製された状態では2つの被縫製材が縫い合わされて密着している場合を含む。また、間欠的に被縫製材を押さえ付ける押さえ機構が存在する場合には、押さえ機構が2つの被縫製材押さえつけていない状態で、第1の被縫製材の縫われる部分に対して第2の被縫製材の縫われる部分が傾いた状態とされ、縫製時には押さえ機構が2つの被縫製材を押さえ付けて密着させ、縫い合わせる場合を含む。押さえ機構が押さえ付けていない状態には、被縫製材から離れている場合のほか、被縫製材に接触しながらも触れている程度で被縫製材を傾ければそれに伴って動くような場合を含む。また、押さえ機構が間欠動作せずに、常に被縫製材を押さえている場合であっても、その押さえる力に打ち勝って縫い合わされる前に当該部分が相対的に傾く場合を含む。また、当該態様には、両方の被縫製材を傾けて、それらの傾き角度の大きさを異ならせる場合を含む。また、当該態様には、被縫製材の縫製点に向かう手前の部分を保持して相対的に傾けた状態とされる場合を含む。この場合、縫い目の方向とは異なる方向成分を加えて被縫製材を動かすことで撓みを抑制しつつ立体形状に縫製することができる。また、被縫製材の一方又は両方が、平面形状のほか、立体形状であってもよい。以上のような場合を含む本態様によれば、予め被縫製材を立体的に配置しておくことなく立体形状に縫製することができる。
【0008】
前記制御装置は、前記第2の被縫製材の保持位置が前記縫製装置の縫製点へ送る手前の位置であり、当該保持位置において前記第1の被縫製材に対して傾けた状態で保持するように前記ロボットを制御するようにしてもよい。これにより、縫い目の方向対して異なる方向成分に力を加える場合に、被縫製材が撓むことを抑止できる。傾けて保持することには、被縫製材の縫製点における部分が相対的に傾いた状態になる場合のほか、当該部分において互いに平行になっている場合も含む。後者の場合、縫い目の方向に対して異なる成分を加えて被縫製材を移動させることで撓みを抑止しつつ立体形状に縫製できる。前者の場合、前述の成分を加えて被縫製材を移動させなくても立体形状に縫製できる。
【0009】
前記制御装置は、前記第1の被縫製材が、縫製点を囲む位置で、縫製される被縫製材を受けて支える面と平行に沿うように前記ロボットを制御するようにしてもよい。これにより、一方の被縫製材を面に平行に沿わせることで、傾ける被縫製材が一方だけで済むため、取り扱いが容易になる。
【0010】
被縫製材同士を曲面状に重なった状態に縫い上げる場合において、曲面状の突出する側を前記第1の被縫製材とし、曲面状のくぼむ側を前記第2の被縫製材として縫製することとし、前記制御部は、曲面状の突出する側に位置する前記第1の被縫製材に対して、曲面状のくぼむ側に位置する前記第2の被縫製材を傾けた状態で保持し、縫製されるように前記ロボットを制御する、ようにしてもよい。これにより、曲面状形状に縫い上げるときの突出する側、くぼむ側を適切にコントロールできる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
巻き具
1か月前
個人
刺繍具
1か月前
ブラザー工業株式会社
縫製装置
1か月前
個人
自動糸巻機
1か月前
JUKI株式会社
縁かがり縫いミシン
1か月前
株式会社ジャノメ
刺繍データ作成装置およびミシン
1か月前
オムロン株式会社
縫製装置、縫製方法、及び縫製システム
22日前
カード-モンロー コーポレイション
タフティング機およびタフティングの方法
1か月前
オムロン株式会社
縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法
22日前
オムロン株式会社
縫製システム、制御方法、制御プログラム、制御装置、非一時的記憶媒体、及び縫製物製造方法
22日前
オムロン株式会社
縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法
22日前
オムロン株式会社
縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法
22日前
オムロン株式会社
縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法
22日前
他の特許を見る






 特許ウォッチ
特許ウォッチ