TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024053995
公報種別
公開特許公報(A)
公開日
2024-04-16
出願番号
2022160552
出願日
2022-10-04
発明の名称
縫製システム、制御方法、制御プログラム、制御装置、非一時的記憶媒体、及び縫製物製造方法
出願人
オムロン株式会社
,
株式会社松屋アールアンドディ
代理人
弁理士法人太陽国際特許事務所
主分類
D05B
19/16 20060101AFI20240409BHJP(縫製;刺しゅう;タフティング)
要約
【課題】縫い目精度の高い縫製を可能とする。
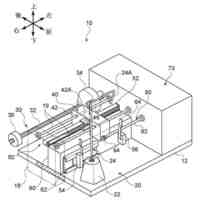
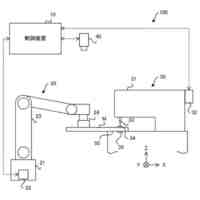
【解決手段】縫製システムは、送り動作を行って被縫製材を縫製する縫製装置と被縫製材を保持するロボットと前記縫製装置及び前記ロボットを制御する制御部を含む制御装置と、を含み、前記ロボットは、前記縫製装置の送り方向の引っ張り力に対して、保持している前記被縫製材を受動的に移動させる機構として機能させるように制御する。
【選択図】図1
特許請求の範囲
【請求項1】
送り動作を行って被縫製材を縫製する縫製装置と、
前記被縫製材を保持するロボットと、
前記縫製装置及び前記ロボットを制御する制御部を含む制御装置と、を含み、
前記ロボットは、前記縫製装置の送り方向の引っ張り力に対して、保持している前記被縫製材を受動的に移動させる機構を有する、
縫製システム。
続きを表示(約 1,000 文字)
【請求項2】
前記機構は、さらに、前記縫製装置の送り方向に対して直交する方向について被縫製材を移動させる、請求項1に記載の縫製システム。
【請求項3】
前記機構は、前記被縫製材を保持する前記ロボットのハンドの保持部分が回転するローラー機構であって、当該ローラー機構が前記送り方向に対して並進方向に対応して回転し、当該ローラー機構が前記送り方向の引っ張り力に応じて回転することにより、前記被縫製材を受動的に移動させる請求項1に記載の縫製システム。
【請求項4】
前記ローラー機構のローラー部分が円盤状である請求項3に記載の縫製システム。
【請求項5】
前記ローラー機構の回転軸が送り方向に対して非平行なローラーである請求項3に記載の縫製システム。
【請求項6】
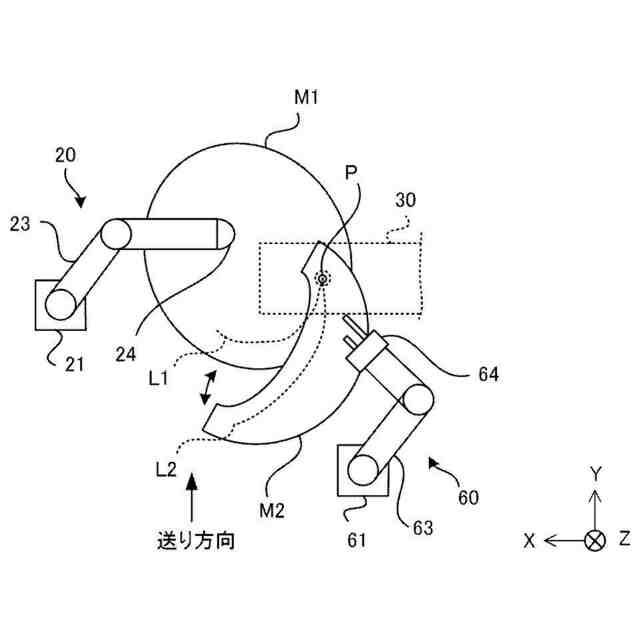
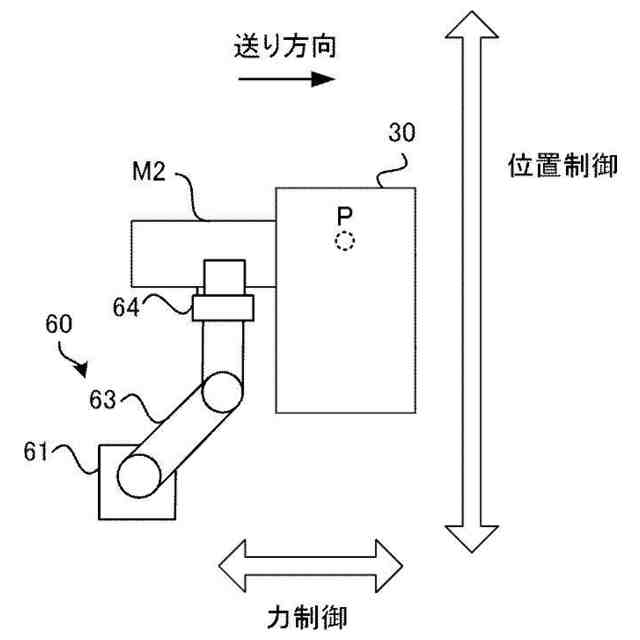
前記機構は、前記制御部による前記ロボットの前記被縫製材を保持する部分についての位置制御及び力制御による機構であり、前記送り方向に対して力制御を行わずに受動的に追従し、前記送り方向とは異なる方向に対して予定位置及び姿勢となるように移動可能とする請求項1に記載の縫製システム。
【請求項7】
前記位置制御は、前記縫製装置の縫製点に対して周方向とする請求項6に記載の縫製システム。
【請求項8】
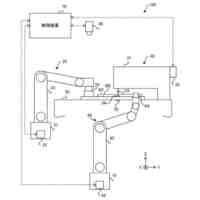
前記被縫製材を、第1の被縫製材と第2の被縫製材とによる複数の被縫製材の各々とし、前記ロボットを、前記第1の被縫製材を保持する第1のロボットと前記第2の被縫製材を保持する第2のロボットとの複数のロボットの各々として、
複数のロボットのうちの一方のロボットが前記機構を有する請求項1に記載の縫製システム。
【請求項9】
送り動作を行って被縫製材を縫製する縫製装置と、被縫製材を保持するロボットであって、前記縫製装置の送り方向の引っ張り力に対して、保持している前記被縫製材を受動的に移動させる機構を有するロボットとを制御する、ことをコンピュータが実行する制御方法。
【請求項10】
送り動作を行って被縫製材を縫製する縫製装置と、被縫製材を保持するロボットであって、前記縫製装置の送り方向の引っ張り力に対して、保持している前記被縫製材を受動的に移動させる機構を有するロボットとを制御する、ことをコンピュータに実行させる制御プログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、縫製システム、制御方法、制御プログラム、制御装置、非一時的記憶媒体、及び縫製物製造方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
縫製ロボットにおいて、ミシンの回転速度とロボットの速度との対応関係が線形となる領域を用いて同期するように移動させる方法が開示されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
中国特許出願公開第110258030A号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
ロボットが被縫製材を保持して縫う方向に移動させるとともに、ミシンが縫い針に向けて被縫製材を送る動作を行う場合、両者の被縫製材を動かす速度が合わないと、たわみなどが生じ、縫い目精度を維持した縫製ができなくなる。ロボットに、指令値に対する追従遅れが生じると縫い目精度を維持した縫製が困難になる。
【0005】
本開示は上記の点に鑑みてなされたものであり、縫い目精度の高い縫製を可能とする縫製システム、制御方法、制御プログラム、制御装置、非一時的記憶媒体、及び縫製物製造方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、第1態様に係る縫製システムは、送り動作を行って被縫製材を縫製する縫製装置と、前記被縫製材を保持するロボットと、前記縫製装置及び前記ロボットを制御する制御部を含む制御装置と、を含み、前記ロボットは、前記縫製装置の送り方向の引っ張り力に対して、保持している前記被縫製材を受動的に移動させる機構を有する。なお、縫製装置は、被縫製材の縫製点の送り方向手前にある部分を縫製点へ向かうように送り動作をする。ここでいう、送り方向の引っ張り力に対して、には、送り方向成分の引っ張り力に対して、である場合を含む。また、縫製装置の送り方向の引っ張り力に対して、保持している被縫製材を受動的に移動させる、ことには、保持している被縫製材が外力によって動かされたときに、縫製装置の送り方成分の動きについては、妨げることも、増進もせず、働きかけられた外力に応じた動きとなるように、保持しつつ送り出すことを含む。
【0007】
前記機構は、さらに、前記縫製装置の送り方向に対して直交する方向について被縫製材を移動させる。ここでいう、縫製装置の送り方向に対して直交する方向には、縫製点における被縫製材の面に沿う方向を含む。また、縫い針が移動する方向に対しても直交する方向を含む。これにより、ロボットによる被縫製材の動きを縫製装置による被縫製材の送り動作に協調させながら当該送り方向以外の方向に被縫製材を移動させるので、高精度に非直線の縫製を行うことができる。
【0008】
前記機構は、前記被縫製材を保持する前記ロボットのハンドの保持部分が回転するローラー機構であって、当該ローラー機構が前記送り方向に対して並進方向に対応して回転し、当該ローラー機構が前記送り方向の引っ張り力に対して応じて回転することにより、前記被縫製材を受動的に移動させるようにしてもよい。送り方向に対応して回転することには、送り方向に対して垂直を除く斜め方向に対応して回転することで送り方向成分に対応して回転する場合を含む。また、縫製を進めていくとロボットによる保持位置が縫製点に近づくために生じる持ち替えを行う必要がない。
【0009】
前記ローラー機構のローラー部分が円盤状であるようにしてもよい。このように円盤とすることで、被縫製材に接する部分の圧力を高め、当該円盤の軸方向に沿う方向について滑りの発生を低減することができる。
【0010】
前記ローラー機構の回転軸が送り方向に対して非平行なローラーであるようにしてもよい。ここで非平行は、ローラー接する被縫製材の面上に投影した回転軸と送り方向とが、垂直である場合を含み、垂直に対して鋭角を加減した角度とする場合を含む。これにより送り方向に対して受動的に被縫製材を移動させることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
巻き具
1か月前
個人
刺繍具
1か月前
ブラザー工業株式会社
縫製装置
1か月前
個人
自動糸巻機
1か月前
JUKI株式会社
縁かがり縫いミシン
1か月前
株式会社ジャノメ
刺繍データ作成装置およびミシン
1か月前
オムロン株式会社
縫製装置、縫製方法、及び縫製システム
23日前
カード-モンロー コーポレイション
タフティング機およびタフティングの方法
1か月前
オムロン株式会社
縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法
23日前
オムロン株式会社
縫製システム、制御方法、制御プログラム、制御装置、非一時的記憶媒体、及び縫製物製造方法
23日前
オムロン株式会社
縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法
23日前
オムロン株式会社
縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法
23日前
オムロン株式会社
縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法
23日前
他の特許を見る






 特許ウォッチ
特許ウォッチ