TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024053992
公報種別
公開特許公報(A)
公開日
2024-04-16
出願番号
2022160549
出願日
2022-10-04
発明の名称
縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法
出願人
オムロン株式会社
,
株式会社松屋アールアンドディ
代理人
弁理士法人太陽国際特許事務所
主分類
D05B
19/16 20060101AFI20240409BHJP(縫製;刺しゅう;タフティング)
要約
【課題】単純な直線の動き又は回転の動きでは実現できない任意の自由曲線の形状の縫製を行えるようにする。
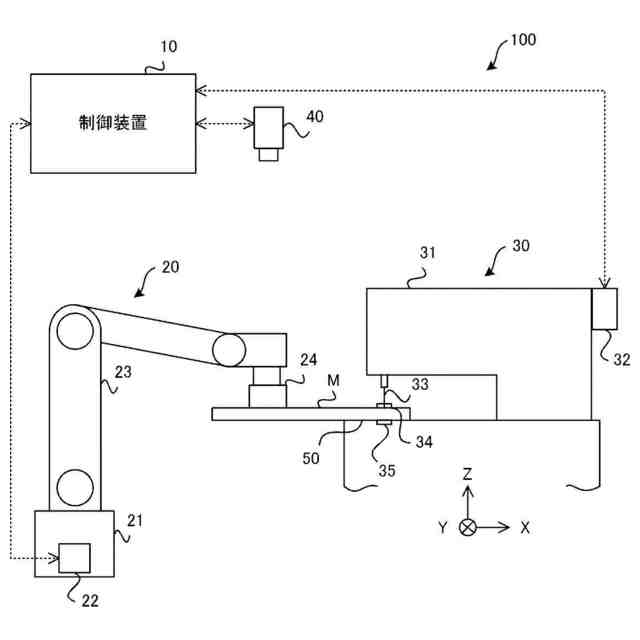
【解決手段】制御装置10は、被縫製材Mの縫製予定位置を縫製点に合わせたときに縫製予定位置の方向が縫製予定方向となるようにロボット保持位置及びロボット保持方向を制御し、ロボット保持位置及びロボット保持方向と、縫製予定位置及び縫製予定方向との関係を用いて、ロボット保持位置速度及び縫製予定位置速度のうち一方の速度に対応する他方の速度を求め、ロボット保持位置がロボット保持位置速度で移動するようにロボット20を制御し、ミシン30の送り速度と、縫製予定位置速度とが一致するように、ミシン30を制御する。
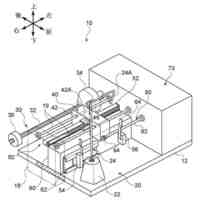
【選択図】図1
特許請求の範囲
【請求項1】
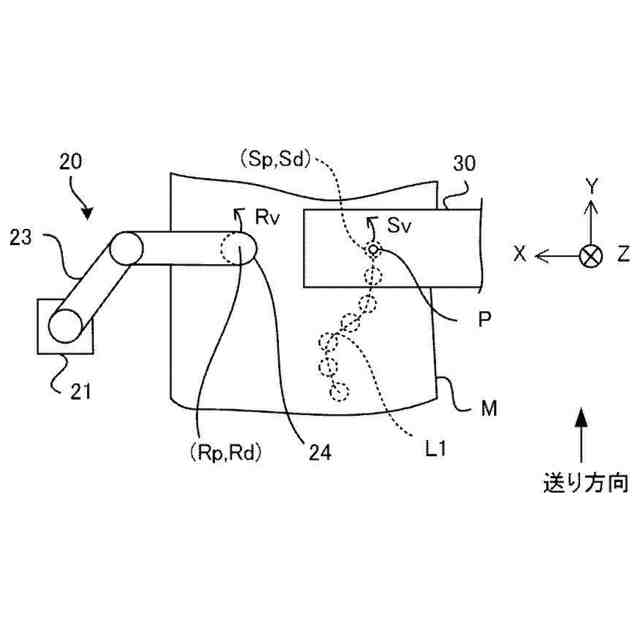
定形の被縫製材の第1部分を保持するロボットであって、前記第1部分を保持するときの前記ロボットの位置であるロボット保持位置及び前記ロボットの方向であるロボット保持方向で保持する前記ロボットと、
予め設定された送り速度で、当該送り速度の方向について前記被縫製材の縫製点の手前にある第2部分が前記縫製点へ向かうように、前記被縫製材の一部を前記送り速度の方向に動かすことで前記被縫製材を送り、前記被縫製材の前記縫製点に送った前記第2部分の縫製を行う縫製装置と、
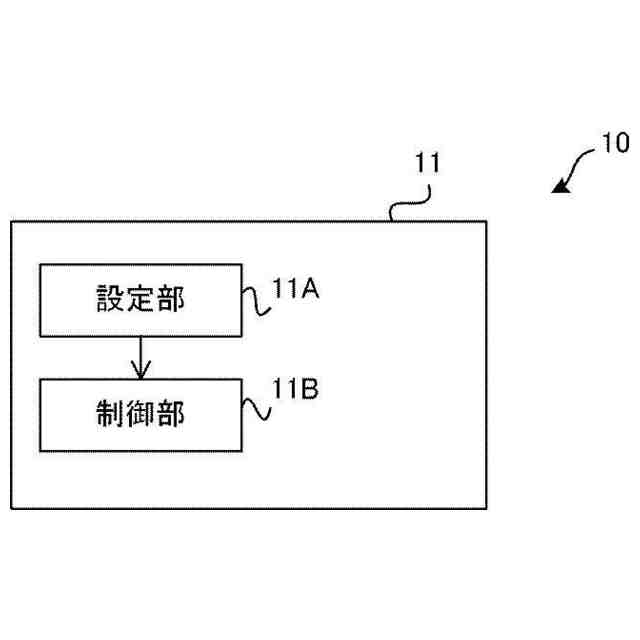
前記ロボット及び前記縫製装置の各々を制御する制御装置と、
を含む縫製システムであって、
前記制御装置は、
前記被縫製材の縫製予定位置を前記縫製点に合わせたときに前記縫製予定位置の方向が縫製予定方向となるように、前記ロボット保持位置及び前記ロボット保持方向を制御し、
前記ロボット保持位置及び前記ロボット保持方向と、前記縫製予定位置及び前記縫製予定方向との関係を用いて、前記ロボット保持位置が移動する速度であるロボット保持位置速度及び前記縫製予定位置が移動する速度である縫製予定位置速度のうち一方の速度に対応する他方の速度を求め、
前記ロボット保持位置が前記ロボット保持位置速度で移動するように前記ロボットを制御し、前記縫製装置の送り速度と、前記縫製予定位置速度とが一致するように、前記縫製装置を制御する制御部
を備えた縫製システム。
続きを表示(約 1,100 文字)
【請求項2】
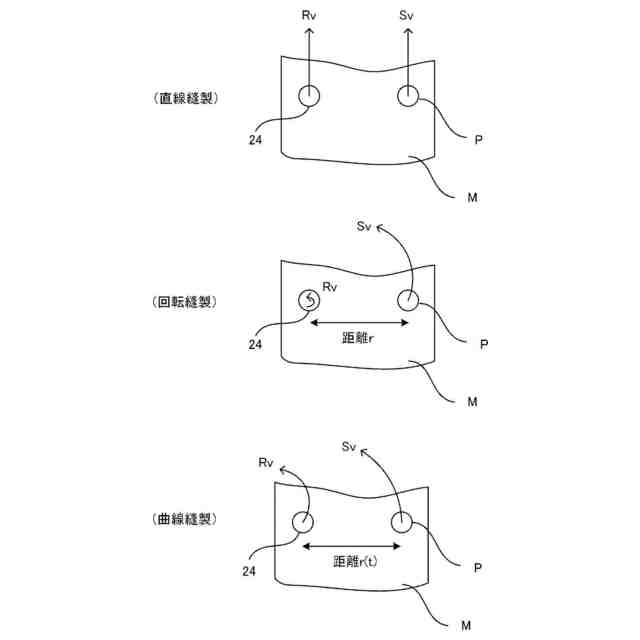
前記縫製予定位置は、前記被縫製材上において連続的な自由曲線上に設定され、
前記制御部は、前記縫製予定位置が前記自由曲線上を順次移動するように前記ロボット保持位置及び前記ロボット保持方向を制御し、前記縫製予定位置に応じて、前記関係を満たす、前記ロボット保持位置速度及び前記縫製予定位置速度を設定する
請求項1に記載の縫製システム。
【請求項3】
前記縫製予定位置は、縫製予定の各縫い目の位置として表され、
前記制御部は、前記縫製予定の各縫い目の位置毎に、前記関係を満たす、前記ロボット保持位置速度及び前記縫製予定位置速度を設定する
請求項2に記載の縫製システム。
【請求項4】
前記制御部は、前記ロボット保持位置速度及び前記縫製予定位置速度の少なくとも一方に上限値を設定する
請求項1に記載の縫製システム。
【請求項5】
前記制御部は、前記ロボット保持位置速度及び前記縫製予定位置速度のうち一方の速度から定まる他方の速度が前記上限値を超えた場合、前記一方の速度を現在速度よりも低く制御する
請求項4に記載の縫製システム。
【請求項6】
前記制御部は、前記ロボット保持位置速度に基づいて定まる前記縫製予定位置速度に対応して、前記縫製装置の送り速度を制御する
請求項1に記載の縫製システム。
【請求項7】
前記制御部は、前記被縫製材を撮影して得られた画像から、前記被縫製材の前記縫製予定位置及び現在の縫製位置を示す現在縫製位置を取得し、前記縫製予定位置と前記現在縫製位置とが一致するように、前記ロボット保持位置及び前記ロボット保持方向を制御する
請求項1に記載の縫製システム。
【請求項8】
前記被縫製材には、前記縫製予定位置が設定される連続的な自由曲線と、前記ロボット保持位置とが立体的に配置される
請求項1に記載の縫製システム。
【請求項9】
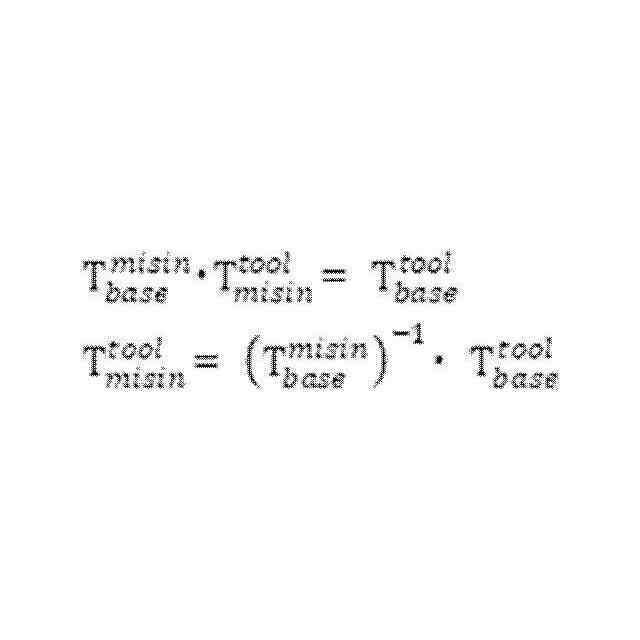
前記制御部は、前記ロボットから、前記ロボット保持位置及び前記ロボット保持位置速度を取得し、前記縫製点から前記ロボット保持位置へ向かう距離を大きさとする距離ベクトルを求め、前記ロボット保持位置速度及び前記距離ベクトルを用いて、前記縫製予定位置速度を算出する
請求項1に記載の縫製システム。
【請求項10】
前記距離ベクトルは、前記ロボットの原点から前記ロボット保持位置に向かう第1ベクトルと、前記原点から前記縫製点に向かう第2ベクトルとを用いて算出される
請求項9に記載の縫製システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
布地等の被縫製材にステッチを縫う場合、ロボットの速度と、ミシンの回転速度とを連動させる技術が開示されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
中国特許出願公開第110258030A号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、保持した被縫製材と被縫製材を移動させるロボットの動きとが並進する関係の場合、ロボットの速度とミシンの速度とを一致させる制御でよい。しかし、定形の被縫製材の部分をロボットで保持して取り回しながら自由曲線の形状の縫製を行う場合、単にロボットの速度とミシンの速度とを一致させる制御では同期が取れず、皺になる等、思い通りの縫製ができない。
【0005】
本開示は、上記の点に鑑みてなされたものであり、単純な直線の動き又は回転の動きでは実現できない任意の自由曲線の形状の縫製を行えるようにする縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、第1態様に係る縫製システムは、定形の被縫製材の第1部分を保持するロボットであって、前記第1部分を保持するときの前記ロボットの位置であるロボット保持位置及び前記ロボットの方向であるロボット保持方向で保持する前記ロボットと、予め設定された送り速度で、当該送り速度の方向について前記被縫製材の縫製点の手前にある第2部分が前記縫製点へ向かうように、前記被縫製材の一部を前記送り速度の方向に動かすことで前記被縫製材を送り、前記被縫製材の前記縫製点に送った前記第2部分の縫製を行う縫製装置と、前記ロボット及び前記縫製装置の各々を制御する制御装置と、を含む縫製システムであって、前記制御装置は、前記被縫製材の縫製予定位置を前記縫製点に合わせたときに前記縫製予定位置の方向が縫製予定方向となるように、前記ロボット保持位置及び前記ロボット保持方向を制御し、前記ロボット保持位置及び前記ロボット保持方向と、前記縫製予定位置及び前記縫製予定方向との関係を用いて、前記ロボット保持位置が移動する速度であるロボット保持位置速度及び前記縫製予定位置が移動する速度である縫製予定位置速度のうち一方の速度に対応する他方の速度を求め、前記ロボット保持位置が前記ロボット保持位置速度で移動するように前記ロボットを制御し、前記縫製装置の送り速度と、前記縫製予定位置速度とが一致するように、前記縫製装置を制御する制御部を備える。
【0007】
定形の被縫製材は、被縫製材自体が定形性を有する場合のほか、不定形の被縫製材であっても型、枠などを用いることで定形的に扱うことができる場合を含む。定形は、ロボットが被縫製材の部分を保持して動かした瞬間、保持している被縫製材の部分の位置と向き(方向)が、被縫製材上の縫製予定位置とその方向、と一定の関係を保ったまま動く程度の定形性であればよく、被縫製材が縫製されたことによって変形していってもよい。
【0008】
ロボット保持位置は、被縫製材を保持する部分として、被縫製材上の広がりのある範囲、複数個所を保持する場合にはその中の代表的な位置を含み、それらと一定の位置関係にある基準位置としてもよい。
【0009】
縫製予定位置は、被縫製材上の縫製を行っていく位置であって、ロボットが保持する部分とは異なる位置である。縫製予定方向は、縫製予定位置にある被縫製材の部分の、縫製時の姿勢、3次元空間内の向きを表す方向であって回転方向もあわせて含み得る。
【0010】
被縫製材の一部は、送り速度の方向について縫製点の手前にある被縫製材の部分であってもよいが、縫製点の周囲の他の部分であってもよい。その一部を動かすことで縫製点にある被縫製材の部分が一体に動くような他の部分であって、一部が複数に分かれた領域であってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
巻き具
1か月前
個人
自動糸巻機
1か月前
オムロン株式会社
縫製装置、縫製方法、及び縫製システム
23日前
オムロン株式会社
縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法
23日前
オムロン株式会社
縫製システム、制御方法、制御プログラム、制御装置、非一時的記憶媒体、及び縫製物製造方法
23日前
オムロン株式会社
縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法
23日前
オムロン株式会社
縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法
23日前
オムロン株式会社
縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法
23日前
他の特許を見る




 特許ウォッチ
特許ウォッチ