TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024053993
公報種別
公開特許公報(A)
公開日
2024-04-16
出願番号
2022160550
出願日
2022-10-04
発明の名称
縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法
出願人
オムロン株式会社
,
株式会社松屋アールアンドディ
代理人
弁理士法人太陽国際特許事務所
主分類
D05B
19/16 20060101AFI20240409BHJP(縫製;刺しゅう;タフティング)
要約
【課題】縫製前の被縫製材を立体形状に固定することなく、被縫製材を立体的に縫製する。
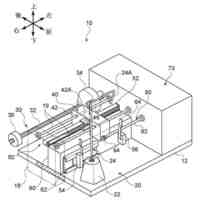
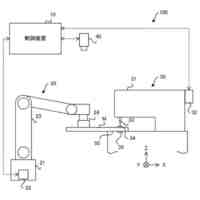
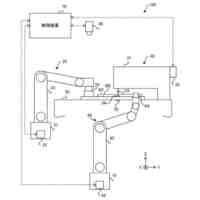
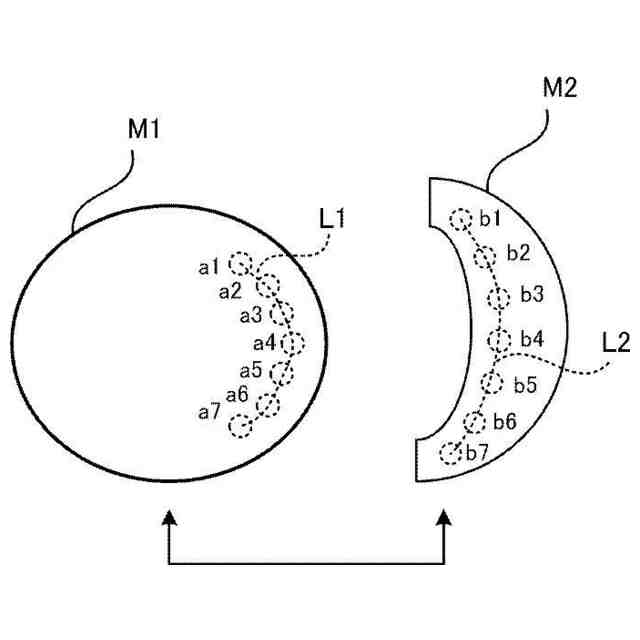
【解決手段】制御装置10は、第1ロボット20が第1被縫製材M1を縫製点に送り、第2ロボット60が第2被縫製材M2を縫製点に送り、第1被縫製材M1及び第2被縫製材M2の各々についての縫い目当たりの移動量又は移動方向が異なるように第1ロボット20及び第2ロボット60を制御する。
【選択図】図1
特許請求の範囲
【請求項1】
第1被縫製材を保持する第1ロボットと、
第2被縫製材を保持する第2ロボットと、
縫製点で重ねられた前記第1被縫製材及び前記第2被縫製材の縫製を行う縫製装置と、
前記第1ロボット、前記第2ロボット、及び前記縫製装置の各々を制御する制御装置と、
を含む縫製システムであって、
前記制御装置は、
前記第1ロボットが前記第1被縫製材を前記縫製点に送り、
前記第2ロボットが前記第2被縫製材を前記縫製点に送り、
前記第1被縫製材及び前記第2被縫製材の各々についての縫い目当たりの移動量又は移動方向が異なるように前記第1ロボット及び前記第2ロボットを制御する制御部
を備えた縫製システム。
続きを表示(約 1,600 文字)
【請求項2】
前記制御装置は、前記第1被縫製材及び前記第2被縫製材のうち一方の被縫製材上の縫い目線に対して、異なる長さ又は形状の縫い目線を他方の被縫製材上に設定する設定部を更に備え、
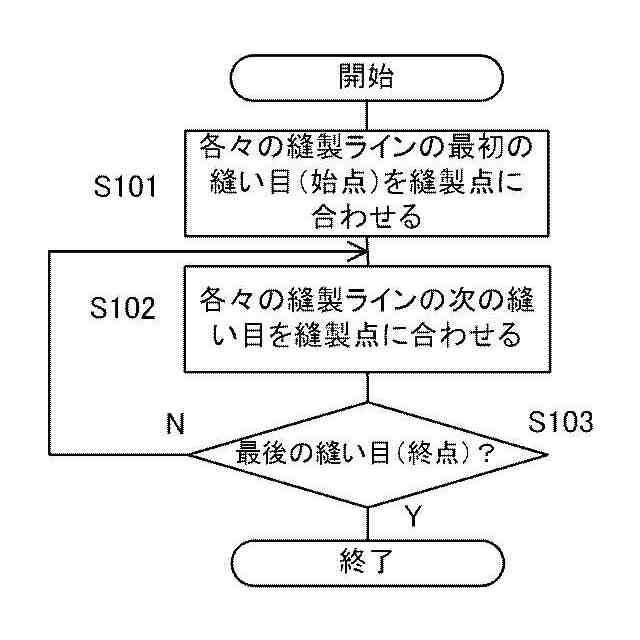
前記制御部は、各々の前記縫い目線を同じ縫い目数で重ねながら、前記各々の縫い目線の始点と終点とが一致するように前記第1ロボット及び前記第2ロボットの各々の移動を制御する
請求項1に記載の縫製システム。
【請求項3】
前記制御装置は、前記第1被縫製材及び前記第2被縫製材のうち一方の被縫製材上の縫い目線に対して、異なる長さ又は形状の縫い目線を他方の被縫製材上に設定する設定部を更に備え、
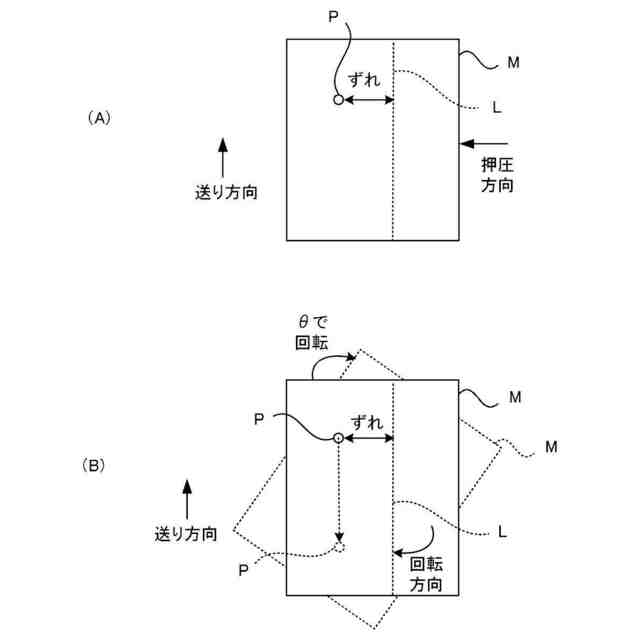
前記制御部は、各々の前記縫い目線を合わせて縫い合わせる際に生じる、縫い目線の相対的な位置ずれを補正するように前記第1被縫製材又は前記第2被縫製材についての移動速度又は移動方向を定める
請求項1に記載の縫製システム。
【請求項4】
前記位置ずれの補正は、前記第1被縫製材の移動方向と前記第2被縫製材の移動方向とが相対的に傾きを持つように行われる
請求項3に記載の縫製システム。
【請求項5】
前記傾きを表す角度には、上限値が設定されており、
前記位置ずれの補正は、前記上限値以下の範囲で行われる
請求項4に記載の縫製システム。
【請求項6】
前記制御装置は、前記第1被縫製材及び前記第2被縫製材のうち一方の被縫製材上の縫い目線に対して、異なる長さ又は形状の縫い目線を他方の被縫製材上に設定する設定部を更に備え、
前記制御部は、各々の前記縫い目線の前記縫製点に送る前の部分を表す上流部分における縫い目線の相対的な位置ずれに基づいて、前記縫い目線の位置ずれが前記縫製点で補正されるように前記第1ロボット及び前記第2ロボットの各々の移動を制御する
請求項1に記載の縫製システム。
【請求項7】
前記制御部は、前記第1被縫製材及び前記第2被縫製材の各々についての連続する縫い目当たりの移動量又は移動方向の変化の絶対値が一定値以下になるように前記第1ロボット及び前記第2ロボットを制御する
請求項1に記載の縫製システム。
【請求項8】
前記第1被縫製材及び前記第2被縫製材の各々についての縫い目当たりの移動量又は移動方向が異なる前記第1ロボット及び前記第2ロボットの制御は、前記第1被縫製材及び前記第2被縫製材の各々についての移動速度が異なる制御である
請求項1に記載の縫製システム。
【請求項9】
前記縫製装置は、
前記第1被縫製材及び前記第2被縫製材を間欠的に押える押え部と、
前記押え部と連動して前記第1被縫製材及び前記第2被縫製材を間欠的に送る送り部と、を備え、
前記制御部は、前記押え部及び前記送り部により送られる前記第1被縫製材及び前記第2被縫製材のいずれか一方の移動が前記縫製装置の送り方向に沿うように前記第1ロボット及び前記第2ロボットを制御する
請求項1に記載の縫製システム。
【請求項10】
前記縫製装置は、
前記第1被縫製材及び前記第2被縫製材を間欠的に押える押え部と、
前記押え部と連動して前記第1被縫製材及び前記第2被縫製材を間欠的に送る送り部と、を備え、
前記制御部は、前記押え部及び前記送り部により送られる前記第1被縫製材及び前記第2被縫製材の少なくとも一方が前記送り部の間欠的な送りタイミングに同期して移動するように前記第1ロボット及び前記第2ロボットを制御する
請求項1に記載の縫製システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
例えば、特許文献1には、ロボットアームにミシンを搭載した縫製システムが記載されている。この縫製システムは、ミシンと、縫製の基準位置を撮影するカメラと、ミシンとカメラを保持するロボットアームと、制御装置とを備える。制御装置は、ミシンの針落ちにより第一の針落ち位置を形成し、制御装置が記憶する針中心位置を通る回動軸回りに規定の角度でミシンを回動させてから、ミシンの針落ちにより第二の針落ち位置を形成する動作制御を行い、さらに、第一の針落ち位置と第二の針落ち位置とをカメラで撮影して得られた撮影画像の撮影範囲内の第一の針落ち位置と第二の針落ち位置の各位置に基づいて、制御装置が記憶する針中心位置を較正する較正処理を実行する。
【先行技術文献】
【特許文献】
【0003】
特開2018-042882号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
被縫製材を立体形状に縫製するためには、上記特許文献1に記載の技術のように、縫製前の被縫製材を立体形状に固定しておく必要があった。
【0005】
本開示は、上記の点に鑑みてなされたものであり、縫製前の被縫製材を立体形状に固定することなく、被縫製材を立体的に縫製することができる縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、第1態様に係る縫製システムは、第1被縫製材を保持する第1ロボットと、第2被縫製材を保持する第2ロボットと、縫製点で重ねられた前記第1被縫製材及び前記第2被縫製材の縫製を行う縫製装置と、前記第1ロボット、前記第2ロボット、及び前記縫製装置の各々を制御する制御装置と、を含む縫製システムであって、前記制御装置は、前記第1ロボットが前記第1被縫製材を前記縫製点に送り、前記第2ロボットが前記第2被縫製材を前記縫製点に送り、前記第1被縫製材及び前記第2被縫製材の各々についての縫い目当たりの移動量又は移動方向が異なるように前記第1ロボット及び前記第2ロボットを制御する制御部を備える。
【0007】
この態様によれば、被縫製材を予め立体形状に固定することなく立体形状に縫い上げることができる。例えば、縫い上がりが重なった曲面形状であれば、曲面を構成する被縫製材のうち曲率半径の大きい側に現れる縫い目の糸の間隔は、曲率半径の小さい側の被縫製材に現れる縫い目の間隔より相対的に長く縫い合わされる。
【0008】
また、前記制御装置は、前記第1被縫製材及び前記第2被縫製材のうち一方の被縫製材上の縫い目線に対して、異なる長さ又は形状の縫い目線を他方の被縫製材上に設定する設定部を更に備え、前記制御部は、各々の前記縫い目線を同じ縫い目数で重ねながら、前記各々の縫い目線の始点と終点とが一致するように前記第1ロボット及び前記第2ロボットの各々の移動を制御するようにしてもよい。
【0009】
但し、縫い目線とは、複数の連続する縫い目を繋いだ線である。
【0010】
この態様によれば、複数の縫い目で移動量又は移動方向を異ならせることで、複数の連なった縫い目によって縫い上げられる被縫製材が立体形状となるように縫製することができる。また、縫い上げられる立体形状の複数の連なった縫い目線には、3次元的な曲線、曲面の一部となる2次元平面上の曲線が含まれる。予め縫い目線を設定することで縫製時の処理負担が軽減される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
巻き具
1か月前
個人
刺繍具
1か月前
ブラザー工業株式会社
縫製装置
1か月前
個人
自動糸巻機
1か月前
JUKI株式会社
縁かがり縫いミシン
1か月前
株式会社ジャノメ
刺繍データ作成装置およびミシン
1か月前
オムロン株式会社
縫製装置、縫製方法、及び縫製システム
23日前
カード-モンロー コーポレイション
タフティング機およびタフティングの方法
1か月前
オムロン株式会社
縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法
23日前
オムロン株式会社
縫製システム、制御方法、制御プログラム、制御装置、非一時的記憶媒体、及び縫製物製造方法
23日前
オムロン株式会社
縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法
23日前
オムロン株式会社
縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法
23日前
オムロン株式会社
縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法
23日前
他の特許を見る





 特許ウォッチ
特許ウォッチ