TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024033073
公報種別
公開特許公報(A)
公開日
2024-03-13
出願番号
2022136457
出願日
2022-08-30
発明の名称
グリッパ
出願人
学校法人立命館
代理人
個人
,
個人
主分類
B25J
15/08 20060101AFI20240306BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】アクチュエータが不要なグリッパを提供する。
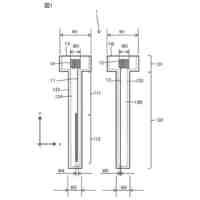
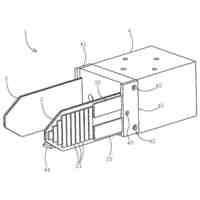
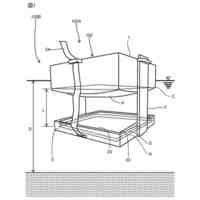
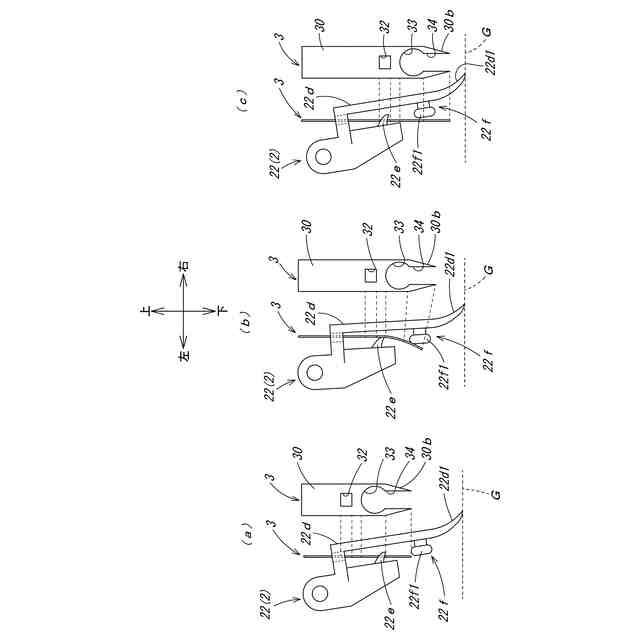
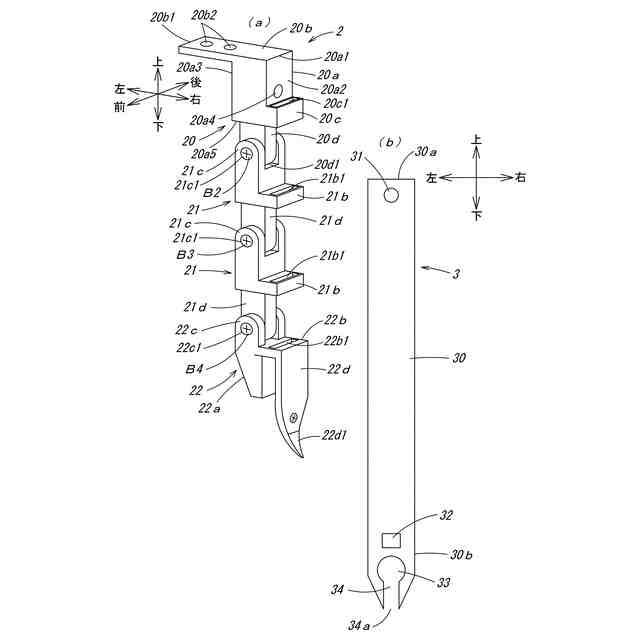
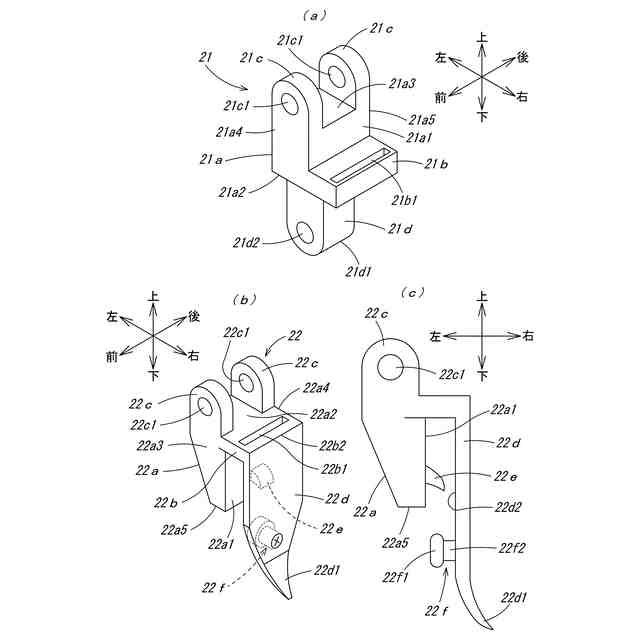
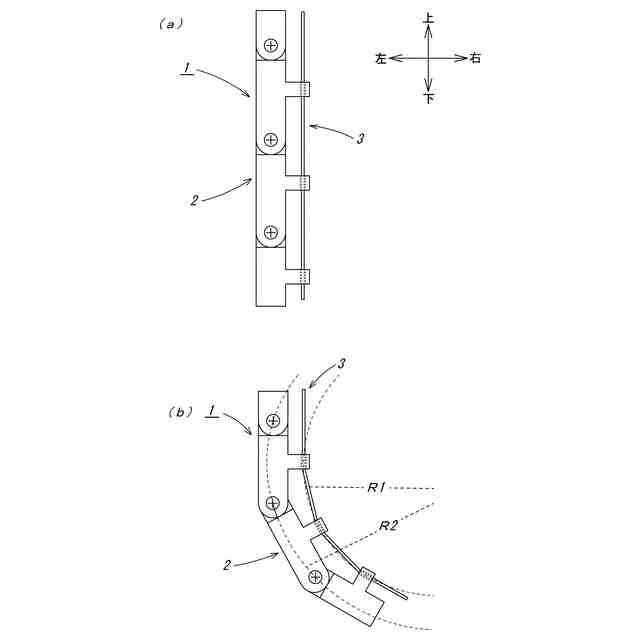
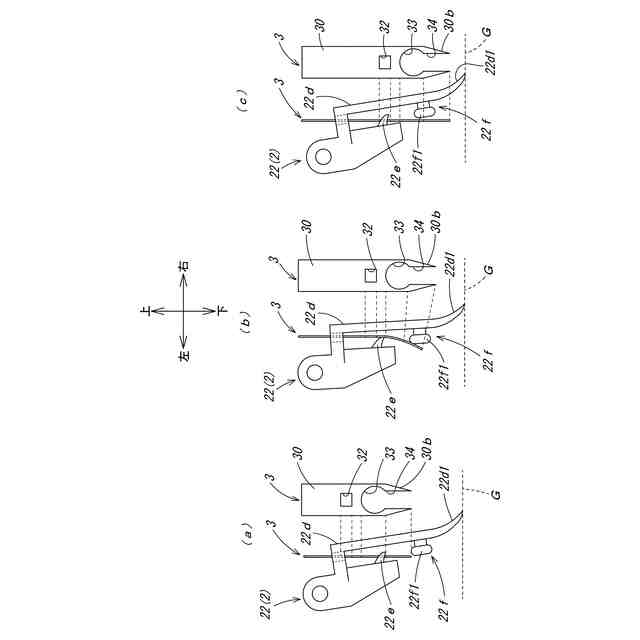
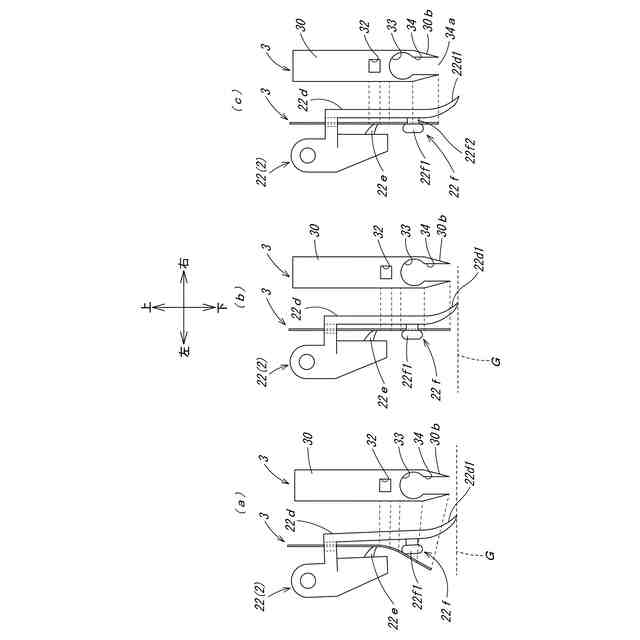
【解決手段】屈曲可能なグリッパ本体2と、グリッパ本体2に設けられている第1突起22eと、グリッパ本体2に設けられている弾性を有する弾性部材3と、を有している。そして、グリッパ本体2の下端部22d1が所定箇所Gに接触すると、弾性部材3が弾性変形し、これによって、第1突起22eが弾性部材3にロックされる。そしてさらに、グリッパ本体2の下端部22d1が所定箇所Gにさらに接触すると、弾性部材3が弾性変形し、これによって、第1突起22eが弾性部材3のロックから解除される。
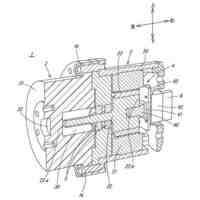
【選択図】図5
特許請求の範囲
【請求項1】
屈曲可能なグリッパ本体と、
前記グリッパ本体に設けられているロック機構と、
前記グリッパ本体に設けられている弾性を有する弾性部材と、を有し、
前記グリッパ本体の先端部が所定箇所に接触すると、前記弾性部材が弾性変形し、これによって、前記ロック機構が前記弾性部材にロックされ、
前記グリッパ本体の先端部が前記所定箇所にさらに接触すると、前記弾性部材が弾性変形し、これによって、前記ロック機構が前記弾性部材のロックから解除されてなるグリッパ。
続きを表示(約 290 文字)
【請求項2】
前記弾性部材は、前記弾性変形した際の該弾性部材の曲率半径が、前記グリッパ本体の曲率半径と異なるものとなるよう前記グリッパ本体に設けられてなる請求項1に記載のグリッパ。
【請求項3】
前記グリッパ本体には、前記ロック機構が前記弾性部材のロックから解除された際、前記グリッパ本体の先端部が前記所定箇所に接触していないにもかからず、再び前記弾性部材にロックされないようにするロック防止機構が設けられてなる請求項1に記載のグリッパ。
【請求項4】
前記グリッパ本体の先端部は、内向き方向に傾斜してなる請求項1に記載のグリッパ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、グリッパに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
近年のロボット普及に伴い、多種多様なグリッパが開発されている。これらグリッパの駆動原理は、モータ駆動や空気圧駆動をはじめ、多岐に渡っている(例えば、非特許文献1,2参照)。
【先行技術文献】
【非特許文献】
【0003】
小澤隆太:“ワイヤ駆動ロボットハンド”,日本ロボット学会誌,vol.39, no. 9, pp.819-822,2021
平井慎一:“食品ハンドリング用ロボットハンド”,計測と制御,vol. 56,no.10,pp.787-791,2017
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記のようなグリッパは、ロボットアームとは別に、モータやコンプレッサなどのアクチュエータを必要とするため、追加のコストを要するという問題があった。さらには、アクチュエータを必要とするため、グリッパの付け替えが煩雑であり、時に、専門的な知識を要する場合もあるという問題があった。
【0005】
そこで、本発明は、上記問題に鑑み、アクチュエータが不要なグリッパを提供することを目的としている。
【課題を解決するための手段】
【0006】
上記本発明の目的は、以下の手段によって達成される。なお、括弧内は、後述する実施形態の参照符号を付したものであるが、本発明はこれに限定されるものではない。
【0007】
請求項1に係るグリッパは、屈曲可能なグリッパ本体(2)と、
前記グリッパ本体(2)に設けられているロック機構(第1突起22e)と、
前記グリッパ本体(2)に設けられている弾性を有する弾性部材(3)と、を有し、
前記グリッパ本体(2)の先端部(下端部22d1)が所定箇所(G)に接触すると、前記弾性部材(3)が弾性変形し、これによって、前記ロック機構(第1突起22e)が前記弾性部材(3)にロックされ、
前記グリッパ本体(2)の先端部(下端部22d1)が前記所定箇所(G)にさらに接触すると、前記弾性部材(3)が弾性変形し、これによって、前記ロック機構(第1突起22e)が前記弾性部材(3)のロックから解除されてなることを特徴としている。
【0008】
請求項2に係るグリッパは、上記請求項1に記載のグリッパ(1)において、前記弾性部材(3)は、前記弾性変形した際の該弾性部材(3)の曲率半径(R1)が、前記グリッパ本体(2)の曲率半径(R2)と異なるものとなるよう前記グリッパ本体(2)に設けられてなることを特徴としている。
【0009】
請求項3に係るグリッパは、上記請求項1に記載のグリッパ(1)において、前記グリッパ本体(2)には、前記ロック機構(第1突起22e)が前記弾性部材(3)のロックから解除された際、前記グリッパ本体(2)の先端部(下端部22d1)が前記所定箇所(G)に接触していないにもかからず、再び前記弾性部材(3)にロックされないようにするロック防止機構(第2突起22f)が設けられてなることを特徴としている。
【0010】
請求項4に係るグリッパは、上記請求項1に記載のグリッパ(1)において、前記グリッパ本体(2)の先端部(下端部22d1)は、内向き方向に傾斜してなることを特徴としている。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
学校法人立命館
グリッパ
1か月前
学校法人立命館
発電センサ
3か月前
学校法人立命館
発電センサ
3か月前
学校法人立命館
ロボットハンド
1か月前
学校法人立命館
配管経路作成装置
4か月前
学校法人立命館
水和電子の生成方法
3か月前
学校法人立命館
セメント含有組成物
4か月前
学校法人立命館
紐状構造物の製造方法
3日前
学校法人立命館
水没型ギヤードサーボモータ
4か月前
学校法人立命館
推定方法、及び、情報処理装置
16日前
学校法人立命館
建設用3Dプリンティング装置
3か月前
学校法人立命館
ひずみゲージ、及び、ひずみの測定方法
6か月前
トヨタ自動車株式会社
錐体分光感度推定装置
2か月前
学校法人立命館
搬送ユニット、移動体システム、及び、移動体
6か月前
学校法人立命館
移動体システム、建材、移動体、及び、移動体の移動方法
4か月前
学校法人立命館
入試管理コンピュータシステム及びコンピュータ実装方法
6か月前
学校法人立命館
三次元データ生成方法、演算装置、及び、コンピュータプログラム
2か月前
兵庫県
炭素繊維強化剤、強化炭素繊維及び炭素繊維強化複合材料
22日前
地方独立行政法人北海道立総合研究機構
把持装置およびその製造方法
7か月前
学校法人立命館
微生物燃料電池用支持体、微生物燃料電池、及びフローティングセンサ
24日前
学校法人立命館
穿刺手技補助システム、穿刺補助画像生成装置及び穿刺補助画像生成方法
2か月前
学校法人立命館
コンテンツ生成方法、コンテンツ生成システム、及び、コンピュータプログラム
2か月前
学校法人立命館
微生物燃料電池用の電極の製造方法、微生物燃料電池用の電極、及び微生物燃料電池
1か月前
国立大学法人東海国立大学機構
接木改善剤
3か月前
学校法人立命館
敵対生成ネットワークを用いたイメージレベルでの腫瘍検出システム、及び、腫瘍を検出する方法
4か月前
学校法人立命館
アノテーション付与学習データ蓄積システム、及び、アノテーション付与学習データを蓄積する方法
7か月前
ブリルニクス シンガポール プライベート リミテッド
固体撮像装置、固体撮像装置の駆動方法、および電子機器
5か月前
学校法人立命館
リン酸化AMP活性化タンパクキナーゼ発現増強用又はリン酸化アセチルCoAカルボキシラーゼ発現増強用食品組成物、リン酸化AMP活性化タンパクキナーゼ発現増強剤、及びリン酸化アセチルCoAカルボキシラーゼ発現増強剤
1か月前
個人
釘抜き機
5か月前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
16日前
株式会社ツノダ
挟持工具
1か月前
UTM株式会社
搬送装置
5か月前
株式会社ツノダ
挟持工具
2か月前
株式会社右川ゴム製造所
把持装置
25日前
川崎重工業株式会社
ハンド
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ