TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2023166289
公報種別
公開特許公報(A)
公開日
2023-11-21
出願番号
2022077246
出願日
2022-05-09
発明の名称
搬送装置
出願人
UTM株式会社
代理人
個人
主分類
B25J
15/06 20060101AFI20231114BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】コンパクトな構造ながら、対象物の搬送中における該対象物の姿勢変化を好適に抑制し、対象物を高い生産性で把持・搬送することができる技術を提供する。
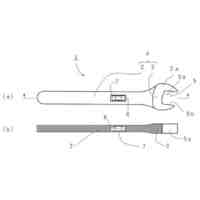
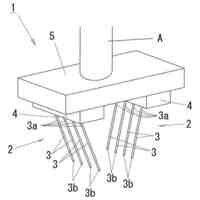
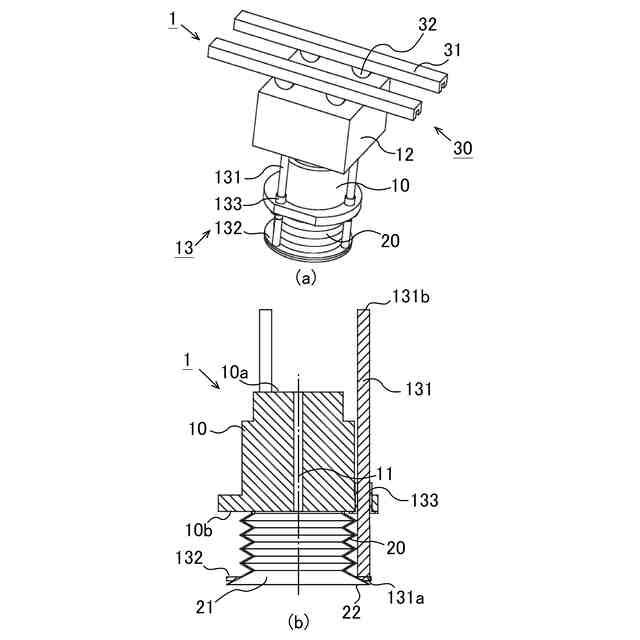
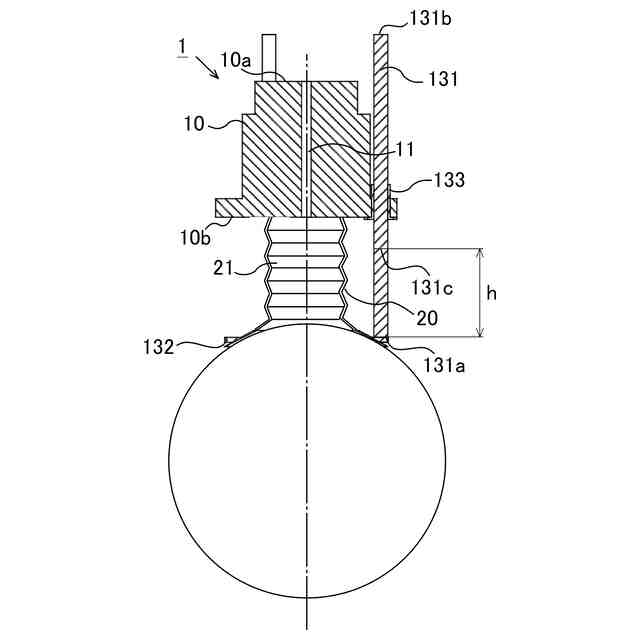
【解決手段】本開示の搬送装置1は、減圧装置12により真空引きされる減圧路11を有する本体部10と、減圧路11に接続され、その空間が減圧可能に構成される減圧室21と、減圧室21に設けられ、対象物を真空吸着する吸着パッド20と、吸着パッド20によって真空吸着された対象物を搬送する搬送部30と、を備える。そして、吸着パッド20は、蛇腹形状を有する円筒であってその軸方向に伸縮可能に構成され、減圧室21は、吸着パッド20によって画定され、本体部10は、搬送部30によって移動させられるときの吸着パッド20の姿勢を拘束するロック部13を更に有し、ロック部13は、吸着パッド20の端部と本体部10とを繋ぐ棒状部材131によって構成される。
【選択図】図1
特許請求の範囲
【請求項1】
所定の対象物を把持し搬送するために用いられる搬送装置であって、
所定の減圧装置に接続可能に構成され、該減圧装置により真空引きされる空気の流路である減圧路を有する本体部と、
前記減圧路に接続され、その空間が減圧可能に構成される減圧室と、
前記減圧室に設けられ、前記対象物を真空吸着する吸着パッドと、
前記本体部を移動させることで、前記吸着パッドによって真空吸着された前記対象物を搬送する搬送部と、
を備え、
前記吸着パッドは、蛇腹形状を有する円筒であってその軸方向に伸縮可能に構成され、その端部が該軸方向に存在する前記対象物に密着することで該対象物を真空吸着し、
前記減圧室は、前記吸着パッドによって画定されるとともに、一方の端部が前記本体部に接続され、他方の端部が前記対象物によって封止される開口端であって、
前記本体部は、前記搬送部によって移動させられるときの前記吸着パッドの姿勢を拘束するロック部を更に有し、
前記ロック部は、前記吸着パッドの端部と前記本体部とを繋ぐ棒状部材によって構成される、
搬送装置。
続きを表示(約 450 文字)
【請求項2】
前記棒状部材は、
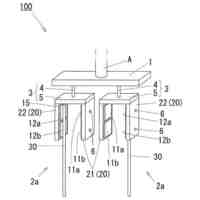
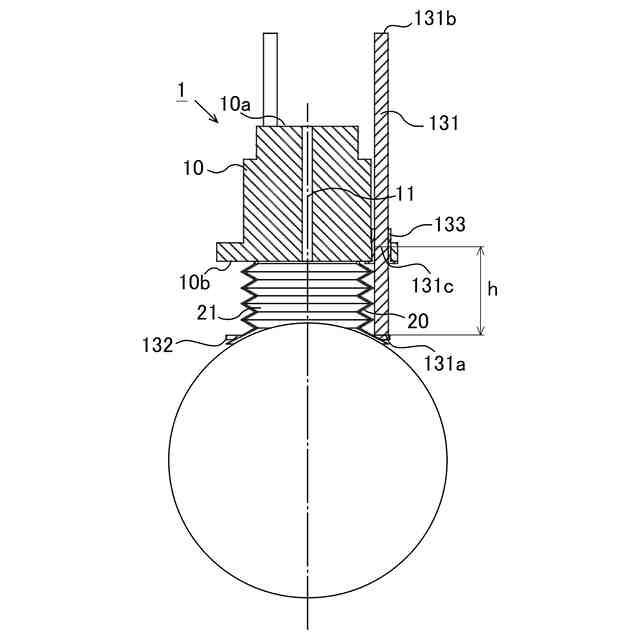
前記吸着パッドの端部が、前記対象物を把持するときの状態であって該吸着パッドの蛇腹形状が軸方向に伸長した伸長状態と、前記対象物を搬送するときの状態であって該吸着パッドの蛇腹形状が軸方向に収縮した収縮状態と、の間で変位可能になるように、
その外周面が、前記本体部に配置されたブッシュの内周面に沿って摺動可能に構成されるとともに、
前記吸着パッドの端部と接続する下端部から所定の高さの中間部分を境に、該下端部と該中間部分との間が所定の剛性部材によって形成され、該下端部の反対側の上端部と該中間部分との間が所定の弾性部材によって形成され、
前記高さは、前記収縮状態において前記中間部分が前記ブッシュ内に位置するように定められる、
請求項1に記載の搬送装置。
【請求項3】
前記棒状部材の前記上端部近傍が前記減圧装置によって吸引されることで、前記収縮状態が形成される、
請求項2に記載の搬送装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、所定の対象物を把持し搬送するために用いられる搬送装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来から、物品を把持・搬送するための搬送装置が知られている。例えば、近年では、搬送ロボットについての技術開発が進んでいて、工業製品の製作現場等では多関節構造のロボットアームを備えた搬送装置が用いられている。
【0003】
一方、対象物を真空吸着する吸着パッドを用いて、ワークを搬送する吸着保持装置が知られている。
【0004】
例えば、特許文献1には、真空引きによる負圧吸引力を利用した吸着パッドを用いた吸着保持装置について、板状ワーク等の搬送および保持に際して吸着すべきワークの形状に応じて吸着パッドの位置が変化する構造が開示されている。
【先行技術文献】
【特許文献】
【0005】
特開2002-307356号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
対象物を真空吸着する吸着パッドを用いて該対象物を把持し搬送する搬送装置では、搬送中における該対象物の姿勢が不良な状態となってしまうと、対象物が吸着パッドから落下することがあり、対象物を破損させる虞がある。また、この場合、対象物を把持し搬送するときの生産性が大きく低下してしまう。そのため、対象物の搬送中には、該対象物の姿勢を変化させずに保持することが重要となる。
【0007】
ここで、特許文献1に記載の技術によれば、ロック手段や拘束手段によって吸着パッドの揺動が拘束されるため、対象物の搬送中における該対象物の姿勢が所定の状態に保持され得る。しかしながら、この技術では、ロック手段が複雑な空圧回路に設けられ、また、拘束手段が複雑な機構によって構成される。そのため、対象物の搬送中に該対象物の姿勢を保持するための構造が比較的複雑になってしまう。このように、構造を複雑化させることなくコンパクトな構造で、対象物の搬送中における該対象物の姿勢変化を好適に抑制する技術については、未だ改良の余地を残すものである。
【0008】
本開示の目的は、コンパクトな構造ながら、対象物の搬送中における該対象物の姿勢変化を好適に抑制し、対象物を高い生産性で把持・搬送することができる技術を提供することにある。
【課題を解決するための手段】
【0009】
本開示の搬送装置は、所定の対象物を把持し搬送するために用いられる搬送装置である。この搬送装置は、所定の減圧装置に接続可能に構成され、該減圧装置により真空引きされる空気の流路である減圧路を有する本体部と、前記減圧路に接続され、その空間が減圧可能に構成される減圧室と、前記減圧室に設けられ、前記対象物を真空吸着する吸着パッドと、前記本体部を移動させることで、前記吸着パッドによって真空吸着された前記対象物を搬送する搬送部と、を備える。そして、前記吸着パッドは、蛇腹形状を有する円筒であってその軸方向に伸縮可能に構成され、その端部が該軸方向に存在する前記対象物に密着することで該対象物を真空吸着し、前記減圧室は、前記吸着パッドによって画定されるとともに、一方の端部が前記本体部に接続され、他方の端部が前記対象物によって封止される開口端であって、前記本体部は、前記搬送部によって移動させられるときの前記吸着パッドの姿勢を拘束するロック部を更に有し、前記ロック部は、前記吸着パッドの端部と前記本体部とを繋ぐ棒状部材によって構成される。
【0010】
上記の搬送装置では、減圧装置が、吸着パッドによって画定される減圧室に接続する減圧路を真空引きし、また、吸着パッドの端部が対象物に密着することで、減圧室の開口端が封止され、これにより、吸着パッドによって、対象物が真空吸着されることになる。このとき、吸着パッドが対象物に接触する際の衝撃が、上記の蛇腹形状によって吸収され、また、吸着パッドの端部を対象物に密着させるために、該吸着パッドで該対象物を押圧したとしても、上記の蛇腹形状によって過度な押圧が抑制される。これによれば、対象物を把持する際に、該対象物が傷ついてしまう事態が可及的に抑制される。更に、このような蛇腹形状(吸着パッド)内の空間が減圧室とされることで、その構造がコンパクトになる。そして、このように蛇腹形状を有する吸着パッドは、そのままでは搬送中において径方向に揺動し易く、仮に、搬送中における対象物の姿勢が不良な状態となってしまうと、対象物と吸着パッドとの密着状態が不良となり該対象物が吸着パッドから落下してしまう虞があるが、ロック部によって吸着パッドの姿勢が拘束されることで、対象物の搬送中における該対象物の姿勢変化を好適に抑制することができる。そして、上記を実現するロック部が、吸着パッドの端部と本体部とを繋ぐ棒状部材によって構成されることで、構造を複雑化させることなくコンパクトな構造で、対象物の搬送中における該対象物の姿勢変化を好適に抑制することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
5か月前
株式会社フジキン
レンチ
6か月前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
16日前
UTM株式会社
搬送装置
5か月前
個人
ペットボトル用蓋開け具。
5か月前
株式会社ツノダ
挟持工具
1か月前
株式会社ツノダ
挟持工具
2か月前
川崎重工業株式会社
ハンド
7か月前
株式会社右川ゴム製造所
把持装置
25日前
川崎重工業株式会社
ハンド
2か月前
川崎重工業株式会社
ハンド
7か月前
個人
ロボットシステム
4か月前
株式会社不二越
ロボット
6か月前
株式会社マキタ
電動工具
7か月前
株式会社不二越
ロボット
4か月前
トヨタ自動車株式会社
関節機構
4か月前
学校法人立命館
グリッパ
1か月前
学校法人立命館
グリッパ
7か月前
オムロン株式会社
ロボット装置
7か月前
オムロン株式会社
搬送システム
7か月前
学校法人立命館
ロボットハンド
1か月前
トヨタ自動車株式会社
関節機構
4か月前
オムロン株式会社
ロボットハンド
6か月前
学校法人立命館
箸グリッパ
7か月前
個人
作業台
5か月前
川崎重工業株式会社
整列システム
7か月前
個人
プーリーキー抜き治具
1か月前
株式会社近藤製作所
ロータリージョイント
6か月前
株式会社不二越
予測システム
2か月前
川崎重工業株式会社
ロボット
6か月前
学校法人立命館
ロボット装置
7か月前
株式会社ダイヘン
画像生成装置
25日前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
3か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ