TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2023152152
公報種別
公開特許公報(A)
公開日
2023-10-16
出願番号
2022062124
出願日
2022-04-01
発明の名称
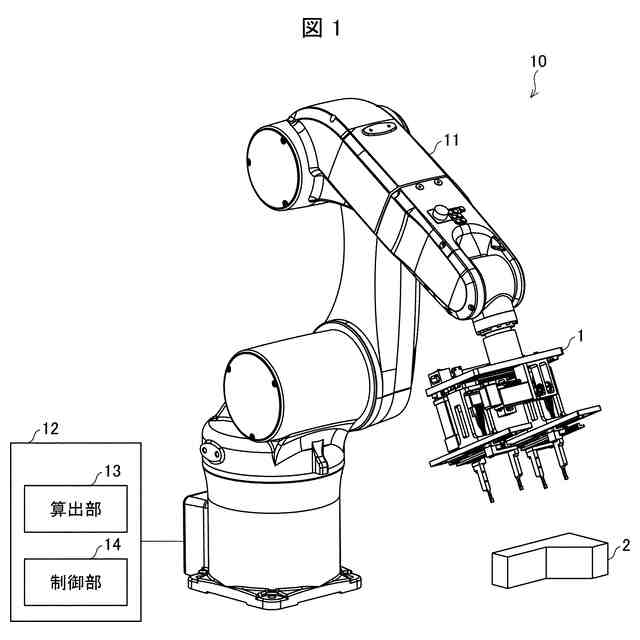
ロボットハンド
出願人
オムロン株式会社
代理人
個人
主分類
B25J
15/00 20060101AFI20231005BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】対象物の把持位置を高い精度で再現するロボットハンドを実現する。
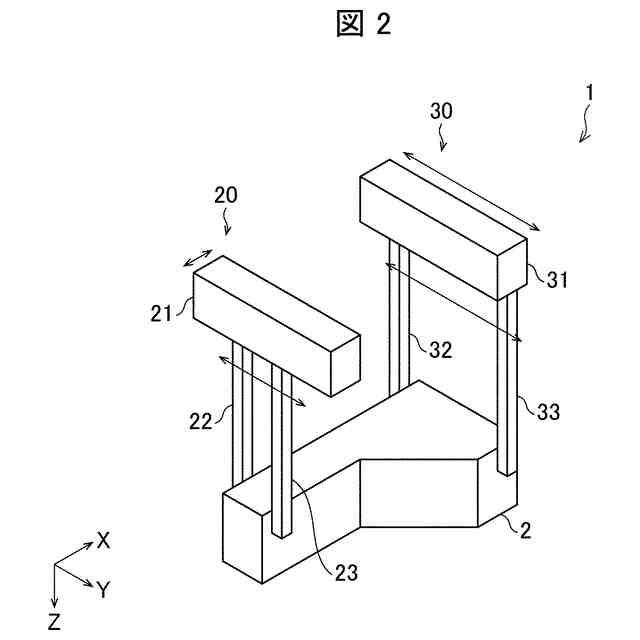
【解決手段】ロボットハンド(1)において、ユニット(20)は、把持部(22)および把持部(23)と共に、X方向に沿って移動する。ユニット(30)は、把持部(32)および把持部(33)と共に、Y方向に沿って移動する。把持部(22)および把持部(23)は、Y方向に沿って、把持部(22)および把持部(23)が互いに連動する形で開閉移動する。把持部(32)および把持部(33)は、Y方向に沿って、把持部(32)および把持部(33)が互いに連動する形で開閉移動する。
【選択図】図2
特許請求の範囲
【請求項1】
対象物を把持するロボットハンドであって、
前記対象物を把持する第1把持部および第2把持部を有する第1ユニットと、
前記対象物を把持する第3把持部および第4把持部を有する第2ユニットと、
前記第1ユニットを、前記第1把持部および前記第2把持部と共に、前記ロボットハンドと前記対象物とを結ぶ方向と垂直な面内における第1方向に沿って移動させる第1駆動部と、
前記第2ユニットを、前記第3把持部および前記第4把持部と共に、前記面内における前記第1方向と垂直な第2方向に沿って移動させる第2駆動部と、
前記第1把持部および前記第2把持部を、前記第2方向に沿って、前記第1把持部および前記第2把持部が互いに連動する形で開閉移動させる第1開閉駆動部と、
前記第3把持部および前記第4把持部を、前記第2方向に沿って、前記第3把持部および前記第4把持部が互いに連動する形で開閉移動させる第2開閉駆動部とを備えている、ロボットハンド。
続きを表示(約 1,100 文字)
【請求項2】
前記第1開閉駆動部は、
前記第1把持部が固定され、かつ側面に第1ギアが形成される第1ラックと、
前記第2把持部が固定され、かつ側面に第2ギアが形成される第2ラックと、
前記第1ギアおよび前記第2ギアの双方とかみ合う第1ピニオンギアとを有し、
前記第2開閉駆動部は、
前記第3把持部が固定され、かつ側面に第3ギアが形成される第3ラックと、
前記第4把持部が固定され、かつ側面に第4ギアが形成される第4ラックと、
前記第3ギアおよび前記第4ギアの双方とかみ合う第2ピニオンギアとを有する、請求項1に記載のロボットハンド。
【請求項3】
請求項1に記載のロボットハンドを制御する制御装置であって、
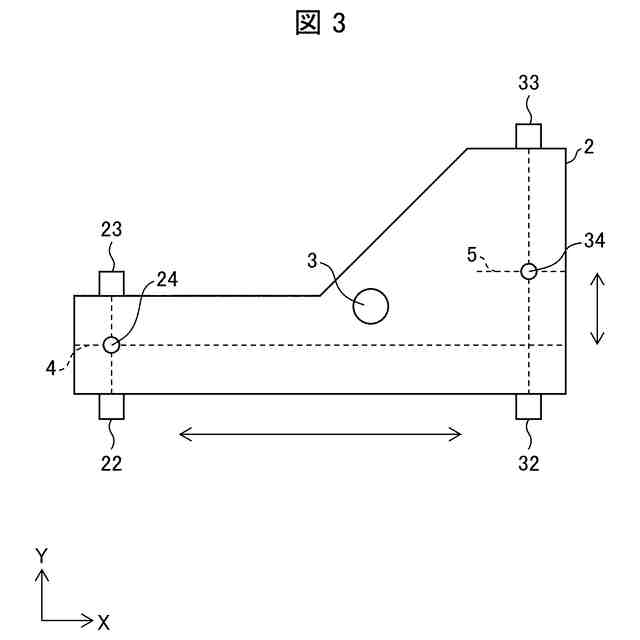
前記対象物の重心および形状に関する情報に基づいて、前記第1~第4把持部が前記重心を囲むように
前記第1~第4把持部が前記対象物を把持する第1~第4把持位置をそれぞれ算出する把持位置算出部と、
前記第1~第4把持部が前記第1~第4把持位置において前記対象物を把持するように、前記第1駆動部、前記第2駆動部、前記第1開閉駆動部、および前記第2開閉駆動部を制御する制御部とを備えている、制御装置。
【請求項4】
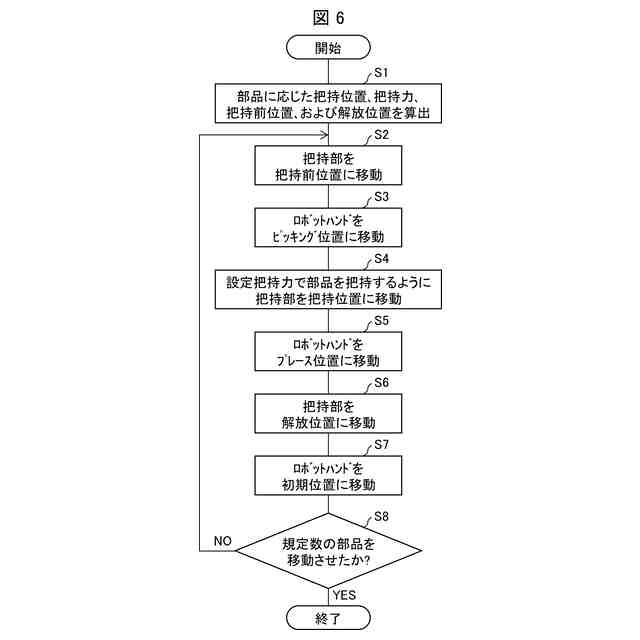
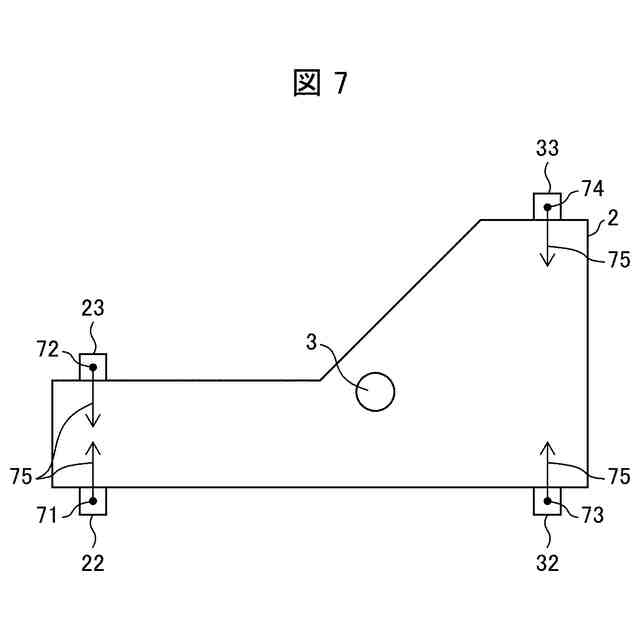
前記ロボットハンドに把持される前の前記対象物が配置される場所において前記対象物の近くに存在する第1構造物の位置に関する情報に基づいて、前記第1~第4把持部が前記対象物を把持する前に前記第1構造物に接触することなく配置される第1~第4把持前位置をそれぞれ算出する把持前位置算出部を備えており、
前記制御部は、前記第1~第4把持部が前記対象物を把持する前に前記第1~第4把持前位置に配置されるように、前記第1駆動部、前記第2駆動部、前記第1開閉駆動部、および前記第2開閉駆動部を制御する、請求項3に記載の制御装置。
【請求項5】
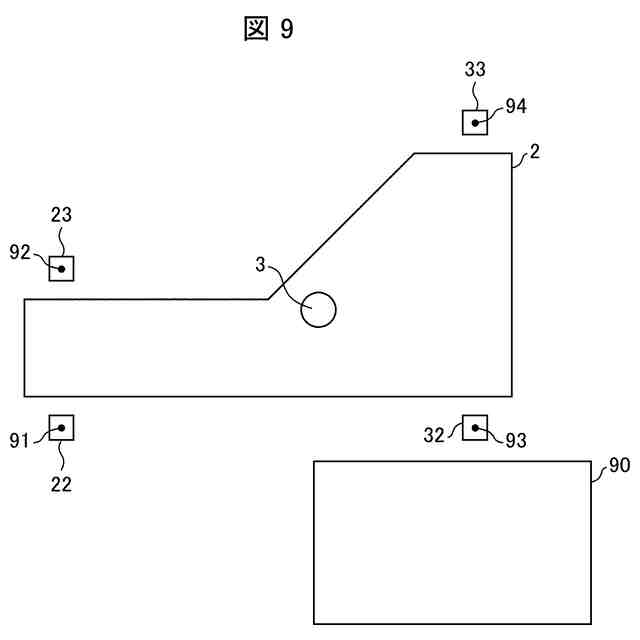
前記ロボットハンドに把持された前記対象物が解放される場所において前記対象物の近くに存在する第2構造物の位置に関する情報に基づいて、前記第1~第4把持部が前記第2構造物に接触することなく前記ロボットハンドが前記対象物を解放する第1~第4解放位置をそれぞれ算出する解放位置算出部を備えており、
前記制御部は、前記第1~第4把持部が前記対象物を解放した後に前記第1~第4解放位置に配置されるように、前記第1駆動部、前記第2駆動部、前記第1開閉駆動部、および前記第2開閉駆動部を制御する、請求項3または4のいずれか1項に記載の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、対象物の搬送および組み立てに用いられるロボットハンドに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、何らかの生産品を工場において自動的に生産するために、ロボットハンドを有するロボットが広く活用されている。ロボットは、ロボットハンドを用いて、生産品に組み込まれる部品を把持し、これを指定場所まで搬送したり、あるいは他の部品に組み込んだりする。このようなロボットハンドの一例として、特許文献1に、親平行開閉機構と、2つの子平行開閉機構とを備え、親平行開閉機構の接続部はそれぞれの子平行開閉機構と接続し、子平行開閉機構の各接続部はフィンガと接続し、フィンガは円筒形の把持面を備え、親平行開閉機構および子平行開閉機構は、フィンガが互いに長手方向の平行を保つように接続部を駆動することを特徴とするロボットハンドが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-188483号
【発明の概要】
【発明が解決しようとする課題】
【0004】
前述した従来技術では、子平行開閉機構に接続される2つのフィンガは、互いに独立して駆動されることによって、開閉移動する。したがって、2つのフィンガ間で把持力のバランスおよび把持タイミングを一定に維持することが難しい。これにより、ある部品を2つのフィンガで対象物を把持する際の対象物の中心線と、同一構造の別の対象物を2つのフィンガで把持する際の中心線とがずれる問題が生ずる。したがって、対象物の把持位置を高い精度で再現することができない。
【0005】
本発明の一態様は、対象物の把持位置を高い精度で再現するロボットハンドを実現することを目的とする。
【課題を解決するための手段】
【0006】
前記の課題を解決するために、本発明の一態様に係るロボットハンドは、対象物を把持するロボットハンドであって、前記対象物を把持する第1把持部および第2把持部を有する第1ユニットと、前記対象物を把持する第3把持部および第4把持部を有する第2ユニットと、前記第1ユニットを、前記第1把持部および前記第2把持部と共に、前記ロボットハンドと前記対象物とを結ぶ方向と垂直な面内における第1方向に沿って移動させる第1駆動部と、前記第2ユニットを、前記第3把持部および前記第4把持部と共に、前記面内における前記第1方向と垂直な第2方向に沿って移動させる第2駆動部と、前記第1把持部および前記第2把持部を、前記第2方向に沿って、前記第1把持部および前記第2把持部が互いに連動する形で開閉移動させる第1開閉駆動部と、前記第3把持部および前記第4把持部を、前記第2方向に沿って、前記第3把持部および前記第4把持部が互いに連動する形で開閉移動させる第2開閉駆動部とを備えている。
【0007】
前記の構成によれば、第1ユニットおよび第2ユニットは互いに直交する第1方向および第2方向にそれぞれ移動できる。これにより、非対称の構造を有する対象物であっても、第1~第4把持部が対象物の重心を囲むように、第1~第4把持部によって対象物を把持することができる。したがって、対象物を安定して把持することができる。互いに連動する第1把持部および第2把持部と、互いに連動する第3把持部および第4把持部とを、それぞれ対象物の異なる側面に押し付けるようにして対象物を把持することができる。これにより、互いに対向する第1把持部と第2把持部との間で把持力が自動的にバランスされ、同様に、互いに対向する第3把持部と第4把持部との間で把持力が自動的にバランスされる。したがって、対称物の把持位置を高い精度で再現することができる。
【0008】
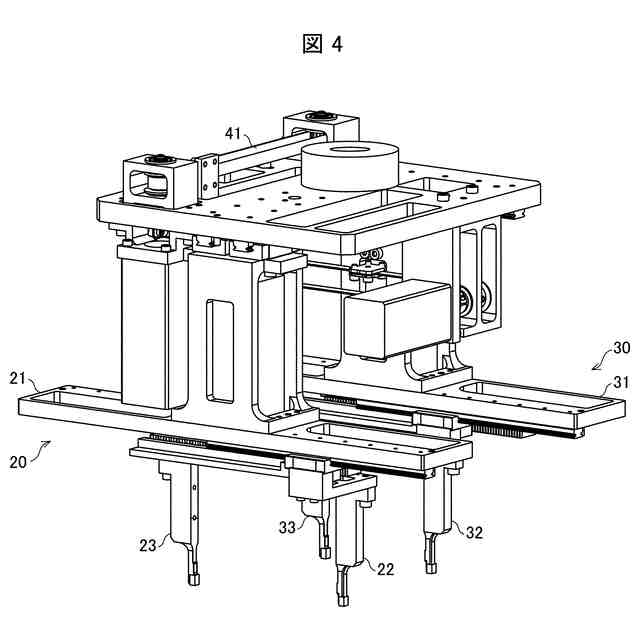
一実施形態において、前記第1開閉駆動部は、前記第1把持部が固定され、かつ側面に第1ギアが形成される第1ラックと、前記第2把持部が固定され、かつ側面に第2ギアが形成される第2ラックと、前記第1ギアおよび前記第2ギアの双方とかみ合う第1ピニオンギアとを有し、前記第2開閉駆動部は、前記第3把持部が固定され、かつ側面に第3ギアが形成される第3ラックと、前記第4把持部が固定され、かつ側面に第4ギアが形成される第4ラックと、前記第3ギアおよび前記第4ギアの双方とかみ合う第2ピニオンギアとを有する。
【0009】
前記の構成によれば、第1把持部および第2把持部を確実に開閉移動させることができ、かつ、第3把持部および第4把持部を確実に開閉移動させることができる。
【0010】
本発明の一態様に係る制御装置は、前述したロボットハンドを制御する制御装置であって、前記対象物の重心および形状に関する情報に基づいて、前記第1~第4把持部が前記重心を囲むように前記第1~第4把持部が前記対象物を把持する第1~第4把持位置をそれぞれ算出する把持位置算出部と、前記第1~第4把持部が前記第1~第4把持位置において前記対象物を把持するように、前記第1駆動部、前記第2駆動部、前記第1開閉駆動部、および前記第2開閉駆動部を制御する制御部とを備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
表示システム
2日前
オムロン株式会社
電力変換装置
2日前
オムロン株式会社
検査ソケットおよび検査装置
2日前
オムロン株式会社
車両感知装置、感知信号生成方法、および感知信号生成プログラム
3日前
個人
釘抜き機
5か月前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
16日前
株式会社ツノダ
挟持工具
2か月前
株式会社ツノダ
挟持工具
1か月前
UTM株式会社
搬送装置
5か月前
株式会社右川ゴム製造所
把持装置
25日前
川崎重工業株式会社
ハンド
2か月前
個人
ロボットシステム
4か月前
学校法人立命館
グリッパ
1か月前
株式会社不二越
ロボット
4か月前
学校法人立命館
ロボットハンド
1か月前
トヨタ自動車株式会社
関節機構
4か月前
トヨタ自動車株式会社
関節機構
4か月前
個人
作業台
5か月前
個人
プーリーキー抜き治具
1か月前
株式会社不二越
予測システム
2か月前
株式会社ダイヘン
情報処理装置
25日前
工機ホールディングス株式会社
作業機
2か月前
小倉クラッチ株式会社
ロボットハンド
4か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社ダイヘン
画像生成装置
25日前
工機ホールディングス株式会社
作業機
4か月前
株式会社ダイヘン
画像生成装置
25日前
国立大学法人東北大学
剛性可変連結体
5か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
3か月前
株式会社中村製作所
トルクドライバー
1か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社共和製作所
ロボット用アーム
3日前
株式会社越智工業所
ブレーカ用カバー
4か月前
工機ホールディングス株式会社
作業機
4か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ