TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024044795
公報種別
公開特許公報(A)
公開日
2024-04-02
出願番号
2022150543
出願日
2022-09-21
発明の名称
情報処理装置
出願人
株式会社ダイヘン
代理人
個人
,
個人
主分類
B25J
9/22 20060101AFI20240326BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】仮想ロボットと仮想ツールの複数の組み合わせのそれぞれについて配置検討を行うことは負担が大きいという問題があった。
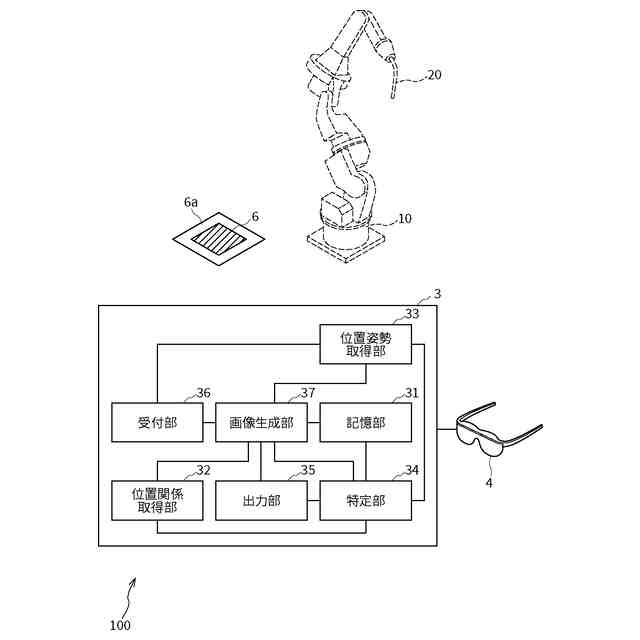
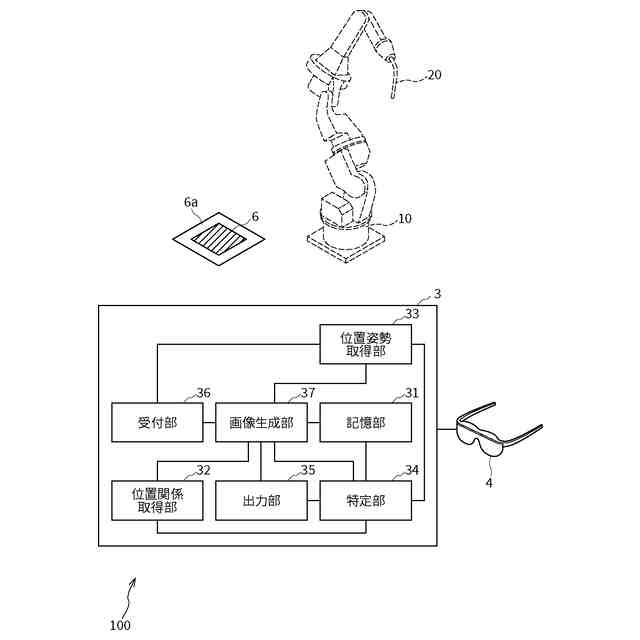
【解決手段】情報処理装置3は、実環境の基準マーカと表示装置4の相対的な位置関係を取得する位置関係取得部32と、目的とする位置及び姿勢を取得する位置姿勢取得部33と、仮想ツールの装着された仮想ロボットの複数の3次元モデルと相対的な位置関係とに基づいて、基準マーカと所定の位置関係となるように配置された複数の仮想ロボットのうち、装着された仮想ツールを目的とする位置及び姿勢にすることができる仮想ロボット及び仮想ツールの組み合わせを特定する特定部34と、特定結果に応じた出力を行う出力部35とを備える。このような構成により、装着された仮想ツールを目的とする位置及び姿勢にすることができる仮想ロボット及び仮想ツールの組み合わせを特定することができる。
【選択図】図1
特許請求の範囲
【請求項1】
実ロボット及び実ツールにそれぞれ対応する仮想ロボット及び仮想ツールの複数の3次元モデルが記憶される記憶部と、
実環境に存在する基準マーカと、画像を実環境の画像または実環境そのものに重ねて表示する表示装置との相対的な位置関係を取得する位置関係取得部と、
仮想ツールに関する目的とする位置及び姿勢を取得する位置姿勢取得部と、
仮想ツールの装着された仮想ロボットの複数の3次元モデルと前記相対的な位置関係とに基づいて、前記基準マーカと所定の位置関係となるように配置された複数の仮想ロボットのうち、装着された仮想ツールを前記目的とする位置及び姿勢にすることができる仮想ロボット及び仮想ツールの組み合わせを特定する特定部と、
前記特定結果に応じた出力を行う出力部と、を備えた情報処理装置。
続きを表示(約 910 文字)
【請求項2】
前記相対的な位置関係に基づいて、前記基準マーカと所定の位置関係となるように、特定された1以上の組み合わせの仮想ロボット及び仮想ツールの3次元モデルを表示するための表示画像を生成する画像生成部をさらに備え、
前記出力部は、前記表示画像を前記表示装置に出力する、請求項1記載の情報処理装置。
【請求項3】
前記出力部は、前記特定結果を出力し、
前記出力された特定結果から、仮想ロボット及び仮想ツールの1以上の組み合わせの選択を受け付ける受付部をさらに備え、
前記画像生成部は、特定された仮想ロボット及び仮想ツールの組み合わせのうち、選択の受け付けられた仮想ロボット及び仮想ツールの1以上の組み合わせの3次元モデルを表示するための表示画像を生成する、請求項2記載の情報処理装置。
【請求項4】
前記特定部は、前記基準マーカと所定の位置関係となるように配置された仮想ロボットであって、前記目的とする位置及び姿勢である仮想ツールが装着された状態で、各関節の角度を逆運動学によって算出することができる仮想ロボット及び仮想ツールの組み合わせを、装着された仮想ツールを前記目的とする位置及び姿勢にすることができる仮想ロボット及び仮想ツールの組み合わせとして特定する、請求項1から請求項3のいずれか記載の情報処理装置。
【請求項5】
仮想ツールの3次元モデルに対する操作を受け付ける受付部と、
前記相対的な位置関係に基づいて、操作された仮想ツールの3次元モデルを表示するための表示画像を生成する画像生成部と、をさらに備え、
前記出力部は、前記表示画像を前記表示装置に出力し、
前記位置姿勢取得部は、操作された仮想ツールの3次元モデルに対応する前記目的とする位置及び姿勢を取得する、請求項1記載の情報処理装置。
【請求項6】
前記位置姿勢取得部は、実環境に存在する操作指示部材の位置及び姿勢によって示される前記目的とする位置及び姿勢を受け付ける、請求項1から請求項3のいずれか記載の情報処理装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、装着された仮想ツールを目的とする位置及び姿勢にすることができる仮想ロボット及び仮想ツールの組み合わせを特定することができる情報処理装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、ロボットの導入時にロボットに装着されたツールが所望の位置に到達できるかどうかは、カタログスペックを参考にして判断していた。しかしながら、ロボットがどの範囲に到達可能であるのかをカタログに基づいて判断することは難しいという問題があった。また、通常、カタログに記載されているのは、ツールを装着していないロボット単体での到達位置であり、ロボットに装着されたツールが所望の位置に到達できるかどうかを、ロボット単体に関する情報から判断することは難しいという問題もあった。
【0003】
また、ロボットを配置する予定の空間を3Dデータ化し、シミュレータによって配置検討を行うこともできるが、その場合には、ロボットの配置予定の空間を3Dデータ化するコストが高いという問題があった。
【0004】
近年、実ロボットに対応する仮想ロボットの3次元モデルを実空間の画像や実空間そのものに重ねて表示することが行われている(例えば、特許文献1~3参照)。ロボットを導入する際の配置検討時に、実ロボットを配置して検討することは現実的ではないが、仮想ロボットを配置することは容易であるため、その仮想ロボットを用いて、仮想ロボットに装着された仮想ツールが所望の位置に到達できるかどうかを判断することはできる。
【先行技術文献】
【特許文献】
【0005】
特開2017-100234号公報
特開2020-055075号公報
特開2020-069538号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、複数の仮想ロボット、及び複数の仮想ツールが存在する場合に、それらの組み合わせについてそれぞれ配置検討を行うことは、配置検討を行う作業者の負担が大きいという問題があった。
【0007】
本発明は、上記課題を解決するためになされたものであり、仮想ロボット及び仮想ツールの複数の組み合わせから、装着された仮想ツールを目的とする位置及び姿勢にすることができる仮想ロボット及び仮想ツールの組み合わせを特定することができる情報処理装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するため、本発明の一態様による情報処理装置は、実ロボット及び実ツールにそれぞれ対応する仮想ロボット及び仮想ツールの複数の3次元モデルが記憶される記憶部と、実環境に存在する基準マーカと、画像を実環境の画像または実環境そのものに重ねて表示する表示装置との相対的な位置関係を取得する位置関係取得部と、仮想ツールに関する目的とする位置及び姿勢を取得する位置姿勢取得部と、仮想ツールの装着された仮想ロボットの複数の3次元モデルと相対的な位置関係とに基づいて、基準マーカと所定の位置関係となるように配置された複数の仮想ロボットのうち、装着された仮想ツールを目的とする位置及び姿勢にすることができる仮想ロボット及び仮想ツールの組み合わせを特定する特定部と、特定結果に応じた出力を行う出力部と、を備えたものである。
【発明の効果】
【0009】
本発明の一態様による情報処理装置によれば、仮想ロボット及び仮想ツールの複数の組み合わせから、装着された仮想ツールを目的とする位置及び姿勢にすることができる仮想ロボット及び仮想ツールの組み合わせを特定することができ、配置検討を行う作業者の負担を軽減することができる。
【図面の簡単な説明】
【0010】
本発明の実施の形態による情報処理システムの構成を示す模式図
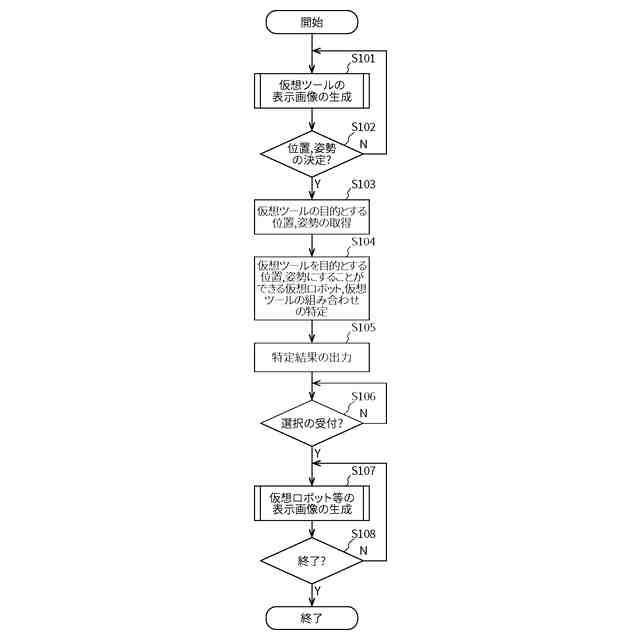
同実施の形態による情報処理装置の動作を示すフローチャート
同実施の形態による情報処理装置の動作を示すフローチャート
同実施の形態における仮想ロボット識別子と仮想ロボットの3次元モデルとの対応の一例を示す図
同実施の形態における仮想ツール識別子と仮想ツールの3次元モデルとの対応の一例を示す図
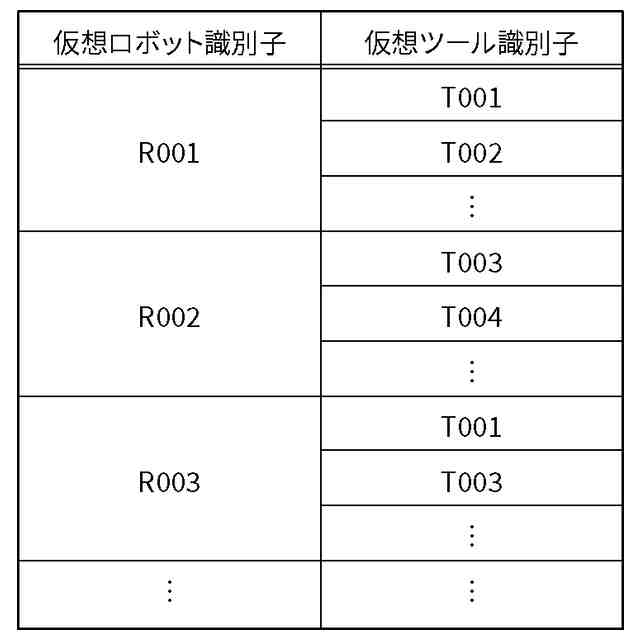
同実施の形態における仮想ロボットと仮想ツールとの可能な組み合わせの一例を示す図
同実施の形態における配置された仮想ツールの一例を示す図
同実施の形態における特定結果の選択のための表示の一例を示す図
同実施の形態における選択された特定結果に応じた表示の一例を示す図
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
5か月前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
25日前
株式会社ツノダ
挟持工具
1か月前
個人
ペットボトル用蓋開け具。
6か月前
UTM株式会社
搬送装置
5か月前
株式会社ツノダ
挟持工具
2か月前
株式会社右川ゴム製造所
把持装置
1か月前
川崎重工業株式会社
ハンド
2か月前
個人
ロボットシステム
4か月前
学校法人立命館
ロボットハンド
2か月前
株式会社不二越
ロボット
4か月前
学校法人立命館
グリッパ
1か月前
トヨタ自動車株式会社
関節機構
4か月前
トヨタ自動車株式会社
関節機構
5か月前
個人
作業台
5か月前
個人
プーリーキー抜き治具
1か月前
CKD株式会社
電動把持装置
4日前
株式会社不二越
予測システム
2か月前
株式会社越智工業所
ブレーカ用カバー
4か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社共和製作所
ロボット用アーム
12日前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
国立大学法人東北大学
剛性可変連結体
5か月前
株式会社ダイヘン
画像生成装置
1か月前
株式会社ダイヘン
情報処理装置
1か月前
株式会社ダイヘン
画像生成装置
1か月前
株式会社中村製作所
トルクドライバー
2か月前
工機ホールディングス株式会社
作業機
3か月前
小倉クラッチ株式会社
ロボットハンド
4か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
4か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ


































