TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024025300
公報種別
公開特許公報(A)
公開日
2024-02-26
出願番号
2022128648
出願日
2022-08-12
発明の名称
作業機
出願人
工機ホールディングス株式会社
代理人
個人
主分類
B25F
5/00 20060101AFI20240216BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】動作性能を向上する。
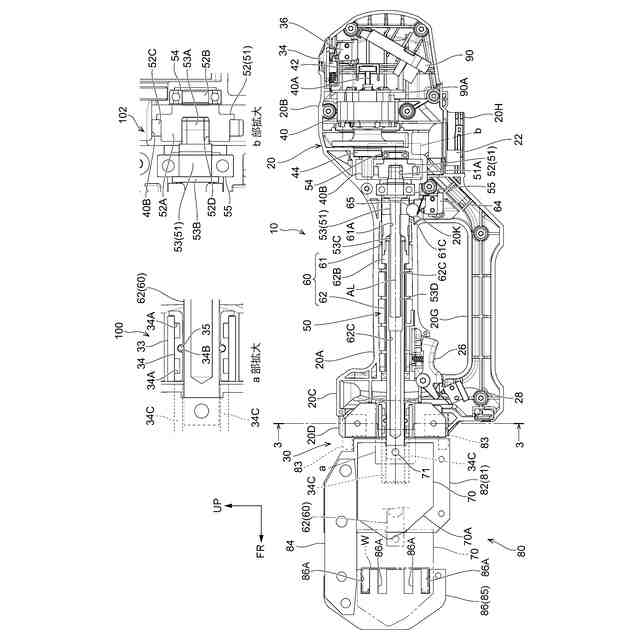
【解決手段】電動切断機10では、リフタ60が、ドライブシャフト53とネジ係合されるナット部61と、ドライブシャフト53が挿入されるリフタ本体62と、を含んで構成されており、ナット部61がリフタ本体62に固定されている。すなわち、リフタ60が、ナット部61とリフタ本体62との2部材で構成されて、両者を固定することで、リフタ60が形成されている。これにより、リフタ60の寸法精度を高くして、送りネジ機構50を良好に作動させることができる。したがって、電動切断機10の動作性能を向上することができる。
【選択図】図2
特許請求の範囲
【請求項1】
モータと、
前記モータの駆動によって回転するネジ部を有する駆動軸と、
前記ネジ部にネジ係合すると共に、前記駆動軸が回転することで前記駆動軸の軸方向に移動する移動部と、
前記移動部に連結され、前記移動部と共に移動する先端工具と、
前記モータ、前記駆動軸、及び前記移動部を支持するハウジングと、
を備え、
前記移動部は、
前記軸方向に延在された移動部本体と、
前記移動部本体の一端部に取り付けられ、前記ネジ部にネジ係合するネジ係合部と、
を含んで構成されている作業機。
続きを表示(約 1,000 文字)
【請求項2】
前記移動部本体は、前記駆動軸が挿入可能なように筒状に形成されている請求項1に記載の作業機。
【請求項3】
前記ネジ部は、雄ネジであり、前記ネジ係合部が雌ネジである請求項2に記載の作業機。
【請求項4】
前記移動部本体は、前記軸方向の一方側へ開放された有底筒状に形成されており、
前記先端工具が前記移動部本体の他端部に固定されている請求項3に記載の作業機。
【請求項5】
前記移動部本体は、前記移動部本体における軸方向一方側の内部を構成する第1中空部と、前記移動部本体における軸方向他方側の内部を構成する第2中空部と、を有しており、
前記第1中空部の内径が、前記第2中空部の内径よりも大きく設定されており、前記駆動軸が前記第1中空部の内部に挿入されている請求項4に記載の作業機。
【請求項6】
前記ネジ部又は前記ネジ係合部が、前記ネジ部の軸線に対して径方向に動作可能なように構成される請求項1に記載の作業機。
【請求項7】
前記移動部を径方向で弾性支持する弾性支持部を備えた請求項6に記載の作業機。
【請求項8】
前記駆動軸の軸方向一方側に設けられ、前記モータの駆動力を前記駆動軸に伝達する伝達ギヤと、
前記駆動軸の一端部に設けられた嵌合部と、
前記伝達ギヤに設けられ、前記嵌合部が一体回転可能に且つ前記軸方向に相対移動可能に嵌合された被嵌合部と、
前記ハウジングに設けられ、前記駆動軸の一端部を回転可能に支持する第1軸受と、
前記ハウジングに設けられ、前記伝達ギヤの一端部を回転可能に支持する第2軸受と、
を備えた請求項6に記載の作業機。
【請求項9】
前記軸方向において、前記嵌合部及び前記被嵌合部が、前記第1軸受と前記第2軸受との間に配置されている請求項8に記載の作業機。
【請求項10】
前記モータの回転軸には、前記伝達ギヤと噛合されるモータギヤが設けられており、
前記モータの駆動によって、前記先端工具が前記軸方向に往復移動し、
前記先端工具の往路移動時には、前記先端工具の加工材に対する加工が施されると共に、前記伝達ギヤと前記モータギヤとの噛合によって生じるスラスト力により、前記伝達ギヤが、前記軸方向の他方側へ移動する請求項9に記載の作業機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機に関するものである。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
下記特許文献1に記載の電動往復動工具(作業機)は、モータと、モータに連結されたスクリューシャフトと、スクリューシャフトにネジ係合されたシャトルスクリューと、シャトルスクリューに装着された可動刃と、を含んで構成されている。すなわち、電動往復動工具が、所謂送りネジ機構を有している。可動刃は、ホルダに移動可能に保持されており、ホルダの前側には、受け板が設けられている。そして、被加工材を受け板にセットし、モータを駆動することで、可動刃が前方へ移動して、被加工材に対して切断加工を施す。
【先行技術文献】
【特許文献】
【0003】
特開2001-277039号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記電動往復動工具では、以下に示す点において、改善の余地がある。すなわち、上述のように、電動往復動工具は、送りネジ機構を有している。送りネジ機構では、例えば、部品公差や組付誤差等の要因によって、ネジ係合される2部品に位置ずれが生じると、送りネジ機構の動作負荷が大きくなり、異音等の動作不良が発生する可能性がある。この場合には、電動往復動工具の動作性能が低下する虞がある。
【0005】
本発明は、上記事実を考慮して、動作性能を向上することができる作業機を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の1又はそれ以上の実施形態は、モータと、前記モータの駆動によって回転するネジ部を有する駆動軸と、前記ネジ部にネジ係合すると共に、前記駆動軸が回転することで前記駆動軸の軸方向に移動する移動部と、前記移動部に連結され、前記移動部と共に移動する先端工具と、前記モータ、前記駆動軸、及び前記移動部を支持するハウジングと、を備え、前記移動部は、前記軸方向に延在された移動部本体と、前記移動部本体の一端部に取り付けられ、前記ネジ部にネジ係合するネジ係合部と、を含んで構成されている作業機である。
【0007】
本発明の1又はそれ以上の実施形態は、前記移動部本体は、前記駆動軸が挿入可能なように筒状に形成されている作業機である。
【0008】
本発明の1又はそれ以上の実施形態は、前記ネジ部は、雄ネジであり、前記ネジ係合部が雌ネジである作業機である。
【0009】
本発明の1又はそれ以上の実施形態は、前記移動部本体は、前記軸方向の一方側へ開放された有底筒状に形成されており、前記先端工具が前記移動部本体の他端部に固定されている作業機である。
【0010】
本発明の1又はそれ以上の実施形態は、前記移動部本体は、前記移動部本体における軸方向一方側の内部を構成する第1中空部と、前記移動部本体における軸方向他方側の内部を構成する第2中空部と、を有しており、前記第1中空部の内径が、前記第2中空部の内径よりも大きく設定されており、前記駆動軸が前記第1中空部の内部に挿入されている作業機である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
5か月前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
16日前
株式会社ツノダ
挟持工具
2か月前
株式会社ツノダ
挟持工具
1か月前
個人
ペットボトル用蓋開け具。
5か月前
UTM株式会社
搬送装置
5か月前
川崎重工業株式会社
ハンド
2か月前
株式会社右川ゴム製造所
把持装置
25日前
個人
ロボットシステム
4か月前
トヨタ自動車株式会社
関節機構
4か月前
株式会社不二越
ロボット
6か月前
学校法人立命館
ロボットハンド
1か月前
株式会社不二越
ロボット
4か月前
学校法人立命館
グリッパ
1か月前
トヨタ自動車株式会社
関節機構
4か月前
個人
作業台
5か月前
オムロン株式会社
ロボットハンド
6か月前
個人
プーリーキー抜き治具
1か月前
株式会社不二越
予測システム
2か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社ダイヘン
情報処理装置
25日前
株式会社ダイヘン
画像生成装置
25日前
工機ホールディングス株式会社
作業機
4か月前
株式会社ダイヘン
画像生成装置
25日前
国立大学法人東北大学
剛性可変連結体
5か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
2か月前
小倉クラッチ株式会社
ロボットハンド
4か月前
株式会社中村製作所
トルクドライバー
1か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社共和製作所
ロボット用アーム
3日前
工機ホールディングス株式会社
作業機
3か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ


































