TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024044794
公報種別
公開特許公報(A)
公開日
2024-04-02
出願番号
2022150542
出願日
2022-09-21
発明の名称
画像生成装置
出願人
株式会社ダイヘン
代理人
個人
,
個人
主分類
B25J
9/22 20060101AFI20240326BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】所定の姿勢のツールが到達可能な範囲を表示するための表示画像を生成する画像生成装置を提供する。
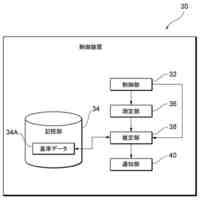
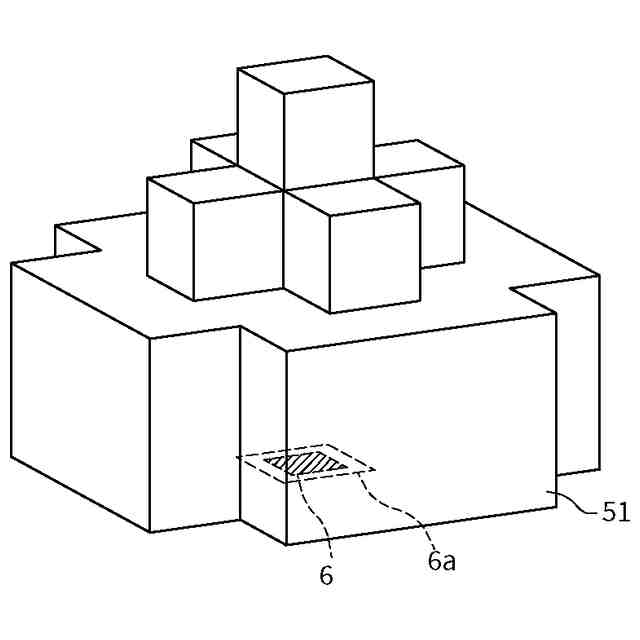
【解決手段】画像生成装置3は、実環境に存在する基準マーカ6と表示装置4との相対的な位置関係を取得する位置関係取得部32と、仮想ツールに関する目的とする姿勢を取得する姿勢取得部33と、仮想ツールの装着された仮想ロボットの3次元モデルに基づいて、基準マーカと所定の位置関係となるように配置された仮想ロボットに装着された目的とする姿勢の仮想ツールの到達可能範囲を特定する特定部34と、相対的な位置関係に基づいて、特定部34によって特定された到達可能範囲を表示するための表示画像を生成する画像生成部36と、表示画像を表示装置4に出力する出力部37と、を備える。このような構成により、目的とする姿勢の仮想ツールの到達可能範囲を知ることができるようになる。
【選択図】図1
特許請求の範囲
【請求項1】
実ロボット及び実ツールに対応する仮想ロボット及び仮想ツールの3次元モデルが記憶される記憶部と、
実環境に存在する基準マーカと、画像を実環境の画像または実環境そのものに重ねて表示する表示装置との相対的な位置関係を取得する位置関係取得部と、
前記仮想ツールに関する目的とする姿勢を取得する姿勢取得部と、
前記仮想ツールの装着された仮想ロボットの3次元モデルに基づいて、前記基準マーカと所定の位置関係となるように配置された仮想ロボットに装着された前記目的とする姿勢の仮想ツールの到達可能範囲を特定する特定部と、
前記相対的な位置関係に基づいて、前記特定部によって特定された到達可能範囲を表示するための表示画像を生成する画像生成部と、
前記表示画像を前記表示装置に出力する出力部と、を備えた画像生成装置。
続きを表示(約 1,000 文字)
【請求項2】
前記特定部は、3次元空間に所定間隔で配置された複数の格子点のうち、前記基準マーカと所定の位置関係となるように配置された仮想ロボットに装着された前記目的とする姿勢の仮想ツールを配置した状態で各関節の角度を逆運動学によって算出することができる格子点である仮想ツールが到達可能な格子点の集合に応じた範囲を、前記目的とする姿勢の仮想ツールの到達可能範囲として特定する、請求項1記載の画像生成装置。
【請求項3】
複数の格子点は、第1の間隔で配置された複数の第1の格子点と、前記第1の間隔より短い第2の間隔で配置された複数の第2の格子点とを含んでおり、
前記特定部は、前記仮想ツールが到達可能な第1の格子点を特定し、前記仮想ツールが到達可能な第1の格子点と、前記仮想ツールが到達可能でない第1の格子点との間について、前記仮想ツールが到達可能な第2の格子点を特定し、前記仮想ツールが到達可能な第1及び第2の格子点の集合に応じた範囲を、前記目的とする姿勢の仮想ツールの到達可能範囲として特定する、請求項2記載の画像生成装置。
【請求項4】
前記特定部は、前記目的とする姿勢の仮想ツールをツール座標系のZ軸周りに回転させたいずれかの角度において逆運動学によって各関節の角度を算出することができる格子点を、前記仮想ツールが到達可能な格子点とする、請求項2記載の画像生成装置。
【請求項5】
前記特定部は、前記目的とする姿勢の仮想ツールを配置した状態で各関節の角度を逆運動学によって算出することができる複数の格子点に、少なくともいずれかの関節の角度が不連続となる境界が存在する場合に、当該境界に対する前記仮想ロボットの基端側の格子点を、前記仮想ツールが到達可能な格子点とする、請求項2記載の画像生成装置。
【請求項6】
前記特定部は、前記目的とする姿勢の仮想ツールを配置した状態で各関節の角度を逆運動学によって算出することができる複数の格子点について、少なくともいずれかの関節の角度が不連続となる境界をも特定し、
前記画像生成部は、特定された境界を表示するための表示画像をも生成する、請求項2記載の画像生成装置。
【請求項7】
前記姿勢取得部は、前記仮想ツールに関する目的とする2以上の姿勢を取得し、
前記特定部は、前記目的とする2以上の姿勢の仮想ツールの到達可能範囲をそれぞれ特定する、請求項1から請求項6のいずれか記載の画像生成装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、目的とする姿勢の仮想ツールが到達可能な範囲を表示するための画像を生成する画像生成装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、ロボットの導入時にロボットに装着されたツールが所望の位置に到達できるかどうかは、カタログスペックを参考にして判断していた。また、シミュレータ内で仮想点を作成し、その仮想点にアプローチ可能なロボットの姿勢の範囲を算出することも行われていた(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2020-175471号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、ロボットに装着されているツールが所定の姿勢である場合に、そのツールが到達可能な範囲をカタログに基づいて判断することは難しいという問題があった。また、通常、カタログに記載されているのは、ツールを装着していないロボット単体での到達位置であり、ロボットに装着されたツールが所望の姿勢でどの範囲に到達できるかを、ロボット単体に関する情報から判断することは難しいという問題もあった。
【0005】
また、上記特許文献1では、作業対象をピッキングするための条件も考慮して、仮想点にアプローチ可能なロボットの姿勢の範囲を算出しており、所定の姿勢のツールがどの範囲に到達できるのかについて、ロボットの配置検討時に知ることはできなかった。
【0006】
本発明は、上記状況に応じてなされたものであり、所定の姿勢のツールが到達可能な範囲を表示するための表示画像を生成する画像生成装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明の一態様による画像生成装置は、実ロボット及び実ツールに対応する仮想ロボット及び仮想ツールの3次元モデルが記憶される記憶部と、実環境に存在する基準マーカと、画像を実環境の画像または実環境そのものに重ねて表示する表示装置との相対的な位置関係を取得する位置関係取得部と、仮想ツールに関する目的とする姿勢を取得する姿勢取得部と、仮想ツールの装着された仮想ロボットの3次元モデルに基づいて、基準マーカと所定の位置関係となるように配置された仮想ロボットに装着された目的とする姿勢の仮想ツールの到達可能範囲を特定する特定部と、相対的な位置関係に基づいて、特定部によって特定された到達可能範囲を表示するための表示画像を生成する画像生成部と、表示画像を表示装置に出力する出力部と、を備えたものである。
【発明の効果】
【0008】
本発明の一態様による画像生成装置によれば、所定の姿勢のツールが到達可能な範囲を表示するための表示画像を生成することができる。そのため、その表示画像を見ることによって、例えば、ロボットの配置検討時に、所定の姿勢のツールがどの範囲に到達可能であるのかを容易に知ることができるようになる。
【図面の簡単な説明】
【0009】
本発明の実施の形態による情報処理システムの構成を示す模式図
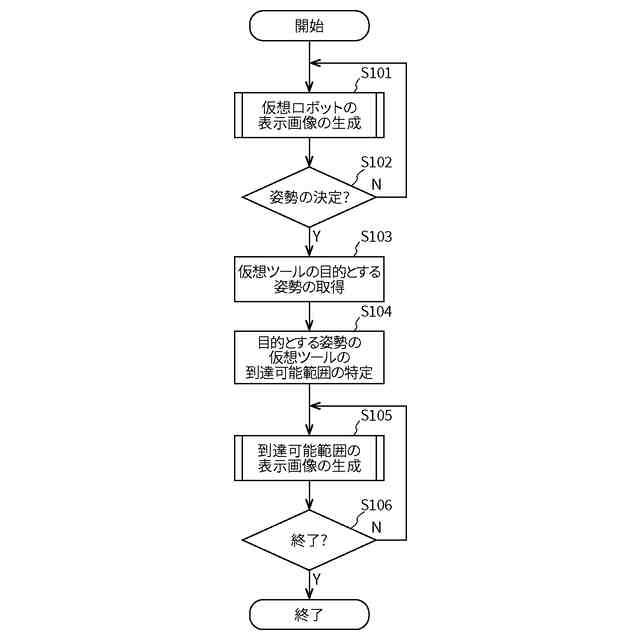
同実施の形態による画像生成装置の動作を示すフローチャート
同実施の形態による画像生成装置の動作を示すフローチャート
同実施の形態における複数の格子点の一例を示す図
同実施の形態における到達可能範囲の表示の一例を示す図
同実施の形態における複数の格子点の一例を示す図
【発明を実施するための形態】
【0010】
以下、本発明による画像生成装置について、実施の形態を用いて説明する。なお、以下の実施の形態において、同じ符号を付した構成要素及びステップは同一または相当するものであり、再度の説明を省略することがある。本実施の形態による画像生成装置は、目的とする姿勢の仮想ツールが到達可能な範囲を表示するための表示画像を生成するものである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
24日前
株式会社ツノダ
挟持工具
2か月前
株式会社ツノダ
挟持工具
1か月前
株式会社右川ゴム製造所
把持装置
1か月前
川崎重工業株式会社
ハンド
2か月前
個人
ロボットシステム
4か月前
トヨタ自動車株式会社
関節機構
4か月前
学校法人立命館
グリッパ
1か月前
株式会社不二越
ロボット
4か月前
学校法人立命館
ロボットハンド
2か月前
個人
プーリーキー抜き治具
1か月前
株式会社不二越
予測システム
2か月前
CKD株式会社
電動把持装置
3日前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社ダイヘン
画像生成装置
1か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社中村製作所
トルクドライバー
1か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社ダイヘン
画像生成装置
1か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社共和製作所
ロボット用アーム
11日前
株式会社越智工業所
ブレーカ用カバー
4か月前
小倉クラッチ株式会社
ロボットハンド
4か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社ダイヘン
情報処理装置
1か月前
西部電機株式会社
吸着装置
25日前
株式会社豆蔵
ロボットハンド
1か月前
株式会社不二越
ロボットシステム
4か月前
西部電機株式会社
吸着装置
25日前
個人
力制限減震装置
1か月前
株式会社マキタ
電動工具
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ