TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2023180370
公報種別
公開特許公報(A)
公開日
2023-12-21
出願番号
2022093611
出願日
2022-06-09
発明の名称
ロボットシステム
出願人
株式会社不二越
代理人
個人
,
個人
主分類
B25J
19/00 20060101AFI20231214BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットの姿勢又は駆動状態によらず、ガススプリングの内部のガス圧の低下状態を推定する。
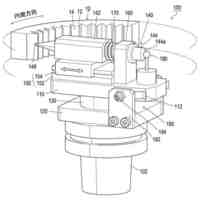
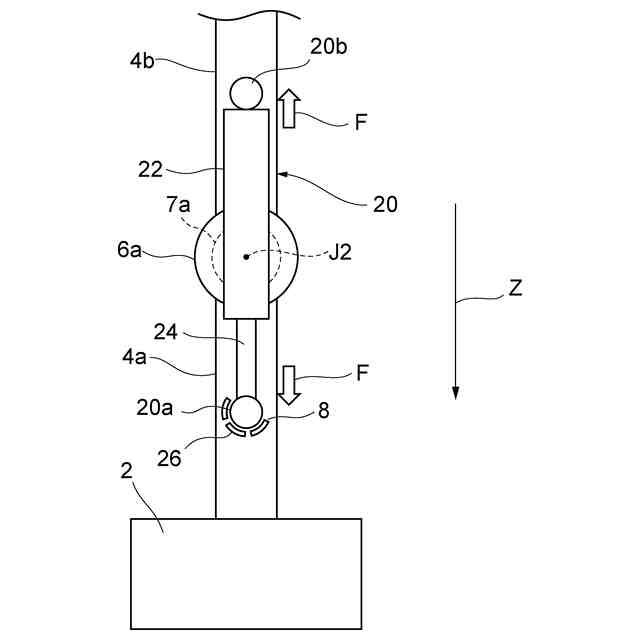
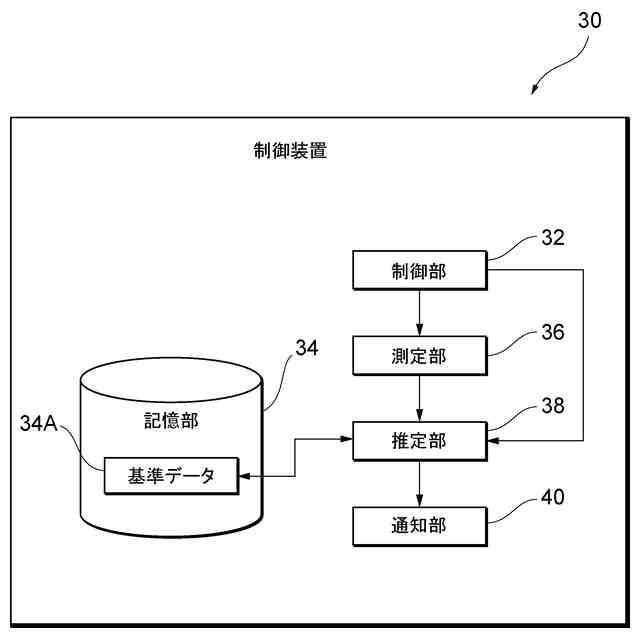
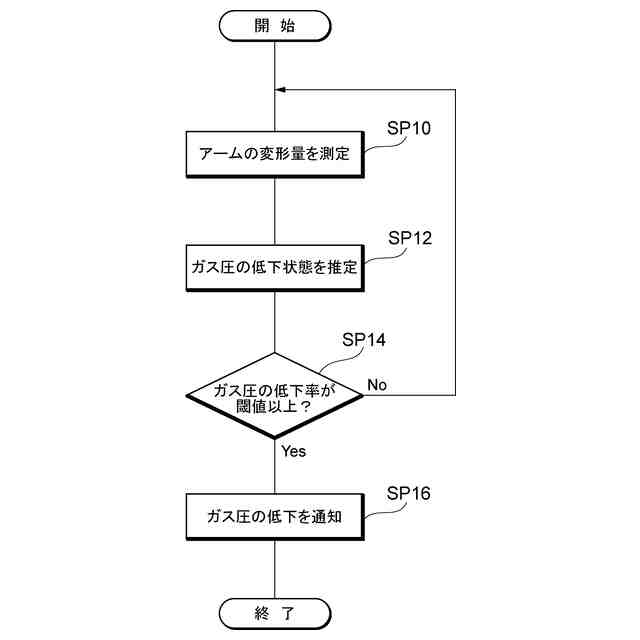
【解決手段】ロボットシステム1は、アーム4aと、アーム4aに関節6aを介して回動自在に支持されるアーム4bと、アーム4bを駆動するための駆動モータ7aと、アーム4aとアーム4bとに固定され、駆動モータ7aの出力を補助するガススプリング20と、を有するロボット10と、アーム4aにおけるガススプリング20が固定されている固定部8の変形量を測定する測定部36と、測定部36により測定された変形量に基づき、ガススプリング20の内部のガス圧の低下状態を推定する推定部38と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
一方のアームと、
前記一方のアームに関節を介して回動自在に支持される他方のアームと、
前記他方のアームを駆動するための駆動モータと、
前記一方のアームと前記他方のアームとに固定され、前記駆動モータの出力を補助する出力補助機構と、
を有するロボットと、
前記一方のアームにおける前記出力補助機構が固定されている固定部の変形量を測定する測定部と、
前記測定部により測定された前記変形量に基づき、前記出力補助機構の補助状態を推定する推定部と、
を備えることを特徴とするロボットシステム。
続きを表示(約 320 文字)
【請求項2】
前記測定部は、前記固定部に設けられたひずみゲージを用いて前記変形量を測定することを特徴とする請求項1に記載のロボットシステム。
【請求項3】
前記推定部は、予め記憶された基準の前記変形量と、前記測定部により測定された前記変形量と、に基づき、前記補助状態を推定することを特徴とする請求項1に記載のロボットシステム。
【請求項4】
前記測定部は、前記駆動モータが停止状態である場合に、前記変形量を測定することを特徴とする請求項1に記載のロボットシステム。
【請求項5】
前記出力補助機構は、ガススプリングであることを特徴とする請求項1~4の何れか一項に記載のロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、一方のアームと他方のアームとに固定され、駆動モータの出力を補助する出力補助機構を有するロボットを具備するロボットシステムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
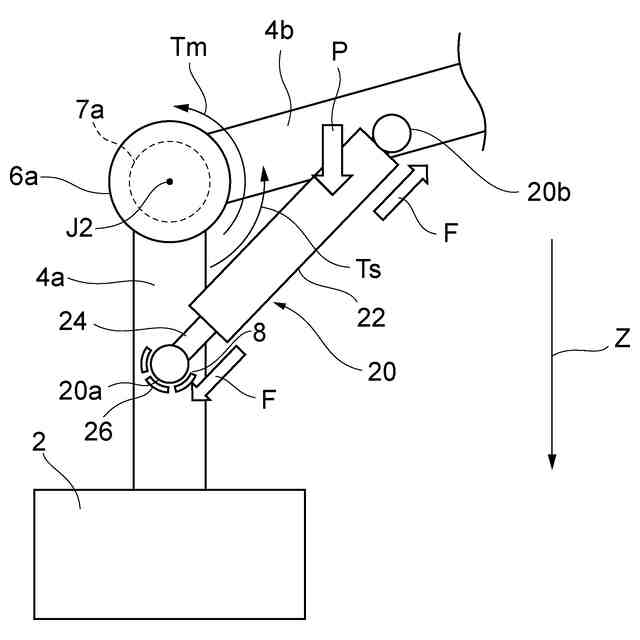
駆動モータによって駆動されるアームを備えるロボットシステムにおけるロボットにおいては、アームに作用する重力によって駆動モータに加わる負荷を低減するための出力補助機構を設けることが知られている。例えば、下記特許文献1に開示されたロボットでは、アームに対して出力補助機構としてのガススプリングを設けており、ガススプリングが出力する補助トルクによって、駆動モータに加わる負荷を低減している。ガススプリングは、シリンダと、当該シリンダ内を摺動可能であって当該シリンダ内に封入された高圧のガスを圧縮するピストンロッドと、を含んでいる。シリンダ内へピストンロッドが挿入されてガススプリングの長さが短くなるにつれて、シリンダ内に封入されたガス圧が大きくなる。ガススプリングは、このガス圧による反力(伸縮力)によって、補助トルクを出力する。
【0003】
ここで、ガススプリングでは、ピストンロッドの摺動によって内部のガスが徐々に漏洩したり、ガススプリングの故障によって内部のガスが急激に漏洩したりすることにより、内部のガス圧が低下してしまうことがある。当該ガス圧が低下すると、ガススプリングの反力が低下し、当該反力による補助トルクが低下してしまう。そして、駆動モータの負荷が増加する結果、駆動モータによってアームを支持することができなくなってしまうおそれがある。このような状況を抑制するため、ガススプリングの補助状態を推定し、推定した補助状態に基づきガススプリングの保守(点検、修理、交換、補充等を含むメンテナンス。)を行う必要がある。
【0004】
下記特許文献1では、ガススプリングの補助状態として内部のガス圧の低下状態を推定する方法が提案されている。この方法では、ガススプリング内のガスが漏洩していないと仮定した場合に駆動モータが負担すべきトルクの理論値と、実際に駆動モータが負担するトルクの実測値とを比較することによって、ガススプリングが出力する補助トルクの低下状態、ひいてはガススプリングの内部のガス圧の低下状態を推定している。
【先行技術文献】
【特許文献】
【0005】
特開2017-159402号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、例えばガススプリングの伸縮方向とアームの回動軸とが一直線上にある死点付近でアームを動作させる場合には、ガススプリングによる補助トルクがほとんど生じなくなる。このため、この死点付近でロボットが繰り返し動作を行う場合、上記特許文献1に開示された方法で推定される補助トルクの低下が、ガススプリングの内部のガス圧の低下によるものなのか、ノイズ又は測定誤差等の他の要因によるものなのかの判別が困難である。
【0007】
また、上記特許文献1に開示された方法では、ガス圧の低下状態を推定するためには、まず駆動モータに設けられた電磁ブレーキを解除しアームを回動自在な状態とした上で、駆動モータによるトルクとガススプリングによる補助トルクとによってアームを支持することが必要になる。このため、ガススプリングの故障等により極度に内部のガス圧が低下していた場合には、駆動モータによるトルクのみでアームを支持することができず、電磁ブレーキを解除すると同時にアームが落下してしまうおそれがある。
【0008】
以上のように、上記特許文献1に開示された方法では、ロボットが特定の姿勢状態である場合や、電磁ブレーキにより駆動モータが制動されロボットが停止状態である場合等において、出力補助機構としてのガススプリングの補助状態を推定することが困難であるという問題がある。
【0009】
そこで、本発明は、ロボットの姿勢又は駆動状態によらず、出力補助機構の補助状態を推定することができるロボットシステムを提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明に係るロボットシステムは、一方のアームと、前記一方のアームに関節を介して回動自在に支持される他方のアームと、前記他方のアームを駆動するための駆動モータと、前記一方のアームと前記他方のアームとに固定され、前記駆動モータの出力を補助する出力補助機構と、を有するロボットと、前記一方のアームにおける前記出力補助機構が固定されている固定部の変形量を測定する測定部と、前記測定部により測定された前記変形量に基づき、前記出力補助機構の補助状態を推定する推定部と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社不二越
歯車寸法測定装置
13日前
株式会社不二越
ロボット制御システム
11日前
株式会社不二越
ロボット制御システム
19日前
株式会社不二越
熱処理装置及び金属製部材製造方法
5日前
個人
釘抜き機
5か月前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
18日前
株式会社ツノダ
挟持工具
1か月前
UTM株式会社
搬送装置
5か月前
株式会社ツノダ
挟持工具
2か月前
株式会社右川ゴム製造所
把持装置
27日前
川崎重工業株式会社
ハンド
2か月前
個人
ロボットシステム
4か月前
学校法人立命館
グリッパ
1か月前
株式会社不二越
ロボット
4か月前
トヨタ自動車株式会社
関節機構
5か月前
学校法人立命館
ロボットハンド
1か月前
トヨタ自動車株式会社
関節機構
4か月前
個人
作業台
5か月前
個人
プーリーキー抜き治具
1か月前
株式会社不二越
予測システム
2か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社ダイヘン
画像生成装置
27日前
株式会社ダイヘン
情報処理装置
27日前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
国立大学法人東北大学
剛性可変連結体
5か月前
株式会社中村製作所
トルクドライバー
1か月前
工機ホールディングス株式会社
作業機
3か月前
株式会社ダイヘン
画像生成装置
27日前
小倉クラッチ株式会社
ロボットハンド
4か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ