TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2023184452
公報種別
公開特許公報(A)
公開日
2023-12-28
出願番号
2023084321
出願日
2023-05-23
発明の名称
ロボットハンド
出願人
小倉クラッチ株式会社
代理人
個人
主分類
B25J
15/08 20060101AFI20231221BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】製造コストを低く抑えながら、指部材が撓むことによる影響を受けることがないとともに、指部材のどの部分でワークを掴んだとしても常に正確な把持力を検出することが可能なロボットハンドを提供する。
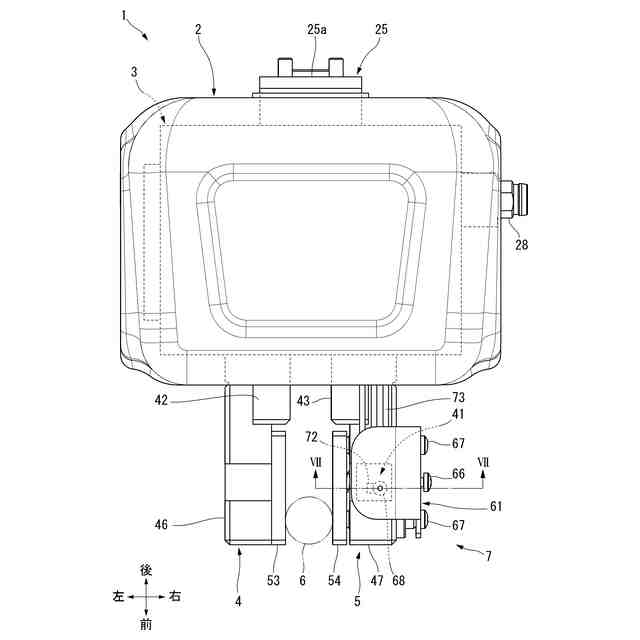
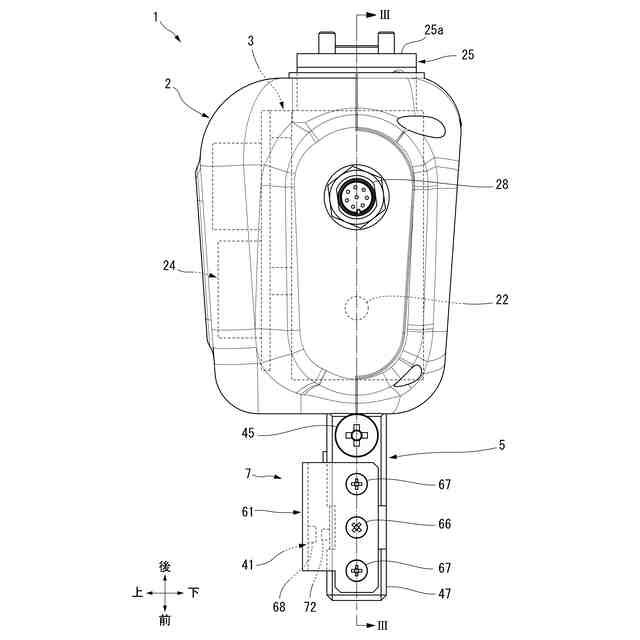
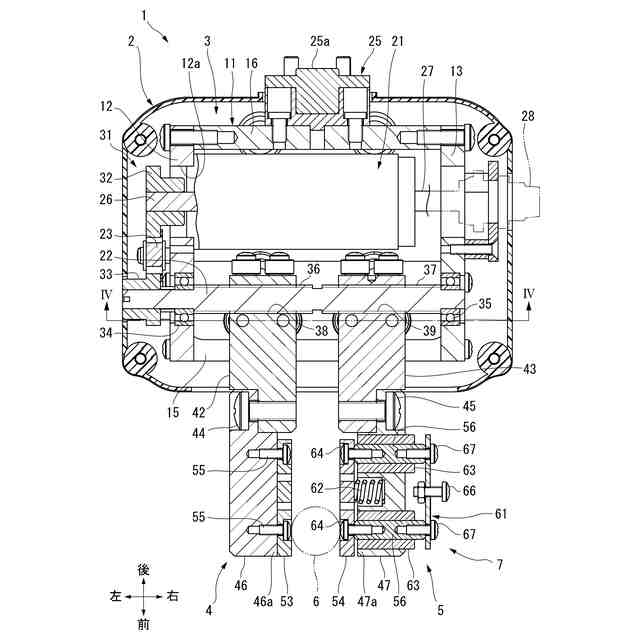
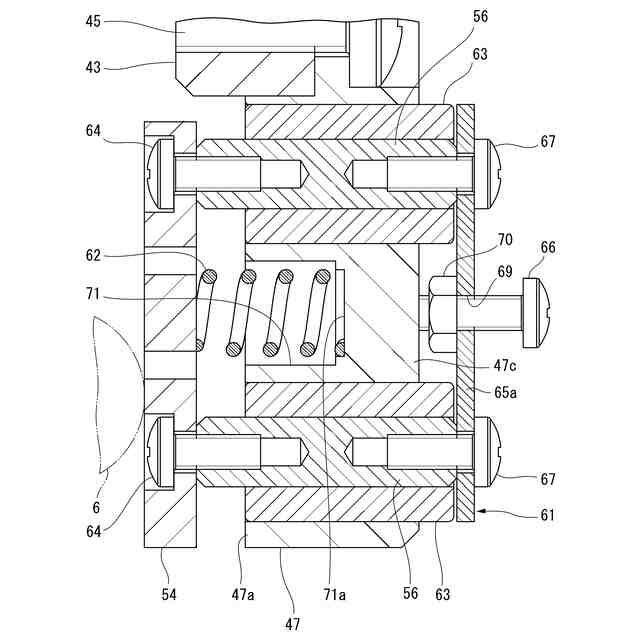
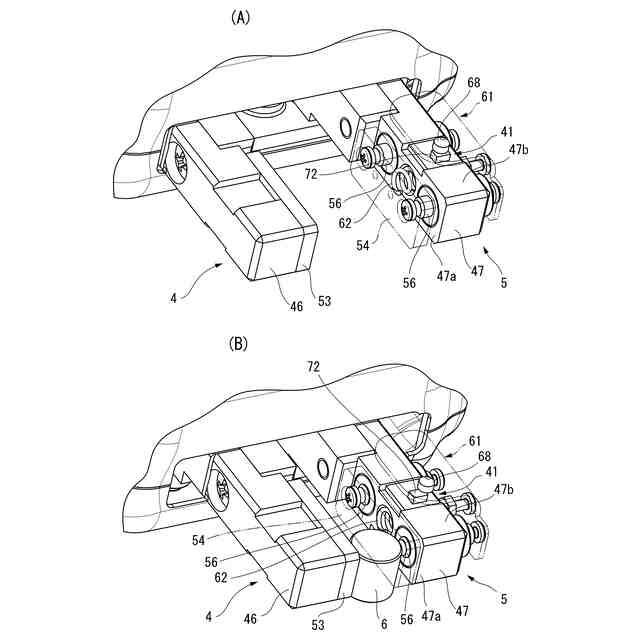
【解決手段】ワーク6を押圧して支持する複数の指部材(第1、第2の指部材4,5)と、押圧力検出用の指部材(第2の指部材5)に設けられた押圧力検出機構7とを備える。押圧力検出機構7は、押圧力検出用の指部材に軸部材56を介してワーク支持方向へ移動自在に支持された可動部材(第2の接触部材54)と、可動部材をワーク6が支持される方向に付勢するばね部材62と、ばね部材62のばね力によって抗して可動部材の移動を規制する規制構造(ストッパ部材61)と、可動部材の移動量に応じて検出値が変化するセンサ41とを備えている。
【選択図】 図6
特許請求の範囲
【請求項1】
互いに接近または離間するワーク支持方向に移動することによりワークを押して支持する複数の指部材と、
前記複数の指部材のうち少なくとも一つの指部材である押圧力検出用の指部材に設けられた押圧力検出機構とを備え、
前記押圧力検出機構は、
前記押圧力検出用の指部材に前記ワーク支持方向に延びる軸部材を介して前記ワーク支持方向へ移動自在に支持され、前記ワークを支持する際の押圧力を伝達する可動部材と、
前記可動部材を前記ワークが支持される方向に付勢するばね部材と、
前記ばね部材のばね力によって付勢された前記可動部材の前記ワーク支持方向への移動を規制する規制構造と、
前記可動部材が前記ばね部材のばね力に抗して前記押圧力検出用の指部材に対して移動する際の移動量に応じて検出値が変化するセンサとを備えたことを特徴とするロボットハンド。
続きを表示(約 2,300 文字)
【請求項2】
請求項1に記載のロボットハンドにおいて、
前記指部材は、前記ワーク支持方向とは直交する方向に延びる棒状に形成され、
前記軸部材は、前記押圧力検出用の指部材における、前記ワーク支持方向とは直交する方向の複数の位置にそれぞれ設けられているとともに、それぞれ前記指部材を貫通し、
前記可動部材は、前記複数の軸部材が並ぶ方向に延びる板状に形成されているとともに、前記押圧力検出用の指部材の前記ワークと対向する一側部と前記ワーク支持方向に並ぶ状態で前記複数の軸部材が並ぶ方向の両端部において前記軸部材の一端部に固定され、
前記規制構造は、前記軸部材の他端部に一体に移動するように取付けられて前記押圧力検出用の指部材と対向するストッパ部材を含み、
前記ばね部材は、前記可動部材における前記複数の軸部材の間の部位を付勢していることを特徴とするロボットハンド。
【請求項3】
請求項2記載のロボットハンドにおいて、
前記ばね部材は、前記可動部材の前記複数の軸部材が並ぶ方向の中央部を付勢する構成が採られていることを特徴とするロボットハンド。
【請求項4】
請求項2に記載のロボットハンドにおいて、
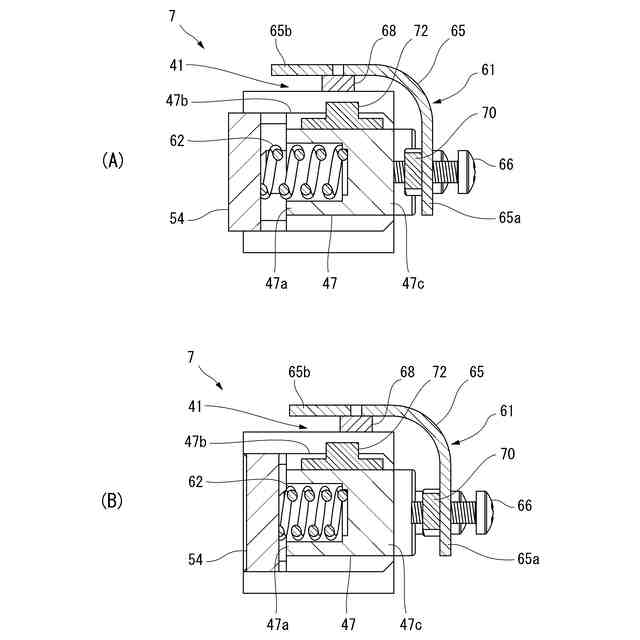
前記ストッパ部材には、前記押圧力検出用の指部材の前記ワークとは反対側に位置する他側部に接触するねじ部材が螺合し、
前記ねじ部材のねじ込み量を変えることにより、前記可動部材と前記押圧力検出用の指部材との間隔が調整されることを特徴するロボットハンド。
【請求項5】
請求項2に記載のロボットハンドにおいて、
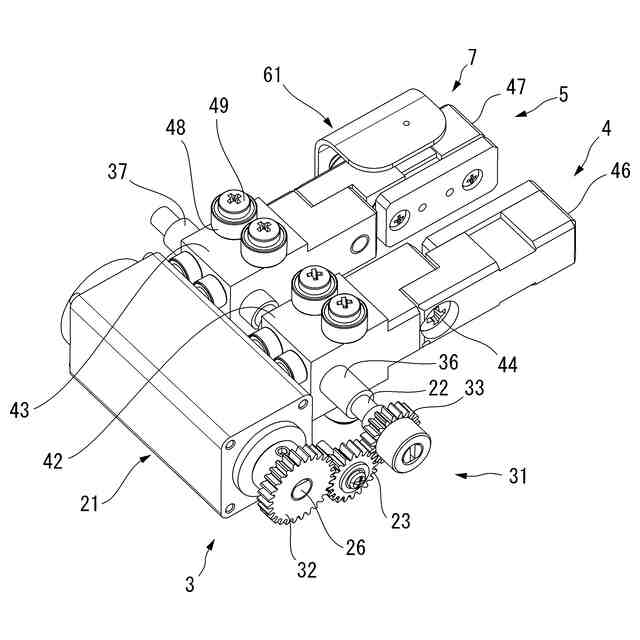
前記複数の指部材は、放射状に延びる3つの移動路に、個々の移動路の延びる方向が前記ワーク支持方向となるようにそれぞれ移動可能に設けられ、
これら3個の前記指部材のうち一つの前記指部材が前記押圧力検出用の指部材であり、
前記3つの移動路は、全ての指部材が同期して3つの移動路の中心側または外側に移動する駆動装置を備えていることを特徴とするロボットハンド。
【請求項6】
請求項1に記載のロボットハンドにおいて、
前記軸部材は、前記押圧力検出用の指部材を前記ワーク支持方向に貫通し、
前記可動部材は、前記押圧力検出用の指部材を前記ワーク支持方向の両側から挟む一対のばね受け部を有し、
前記ばね部材は、
前記押圧力検出用の指部材と一方の前記ばね受け部との間に設けられて一方の前記ばね受け部を前記指部材から離れる方向に付勢する第1のばね部材と、
前記押圧力検出用の指部材と他方の前記ばね受け部との間に設けられて他方の前記ばね受け部を前記指部材から離れる方向に付勢する第2のばね部材とからなり、
前記規制構造は、前記押圧力検出用の指部材と、一方の前記ばね受け部と、他方の前記ばね受け部とを用いて構成されていることを特徴とするロボットハンド。
【請求項7】
請求項6に記載のロボットハンドにおいて、
前記指部材は、前記ワーク支持方向とは直交する方向に延びる棒状に形成され、
2本の前記指部材が互いに平行になる状態で前記ワーク支持方向に平行移動する構成が採られ、
前記2本の前記指部材のうち一方の指部材が前記押圧力検出用の指部材であり、
前記ばね受け部は、前記ワーク支持方向における前記可動部材の両端部に設けられているとともに、前記ワークが接触する接触部を有していることを特徴とするロボットハンド。
【請求項8】
請求項6に記載のロボットハンドにおいて、
前記指部材は、前記ワーク支持方向とは直交する方向に延びる棒状に形成され、
2本の前記指部材が互いに平行になる状態で前記ワーク支持方向に平行移動する構成が採られ、
前記2本の前記指部材のうち一方の指部材が前記押圧力検出用の指部材であり、
前記可動部材と、前記2本の前記指部材のうち他方の指部材とには、前記ワークと接触する爪片がそれぞれ設けられていることを特徴とするロボットハンド。
【請求項9】
請求項6に記載のロボットハンドにおいて、
前記複数の指部材は、放射状に延びる3つの移動路に、個々の移動路の延びる方向が前記ワーク支持方向となるようにそれぞれ移動可能に設けられ、
これら3個の前記指部材のうち一つの前記指部材が前記押圧力検出用の指部材であり、
前記ばね受け部は、前記ワーク支持方向における前記可動部材の両端部に設けられているとともに、前記ワークが接触する接触部を有し、
前記3つの移動路は、全ての指部材が同期して3つの移動路の中心側または外側に移動する駆動装置を備えていることを特徴とするロボットハンド。
【請求項10】
請求項6に記載のロボットハンドにおいて、
前記複数の指部材は、放射状に延びる3つの移動路に、個々の移動路の延びる方向が前記ワーク支持方向となるようにそれぞれ移動可能に設けられ、
これら3個の前記指部材のうち一つの前記指部材が前記押圧力検出用の指部材であり、
前記可動部材と、前記押圧力検出用の指部材ではない他の指部材とには、前記ワークと接触する爪片がそれぞれ設けられ、
前記3つの移動路は、全ての指部材が同期して3つの移動路の中心側または外側に移動する駆動装置を備えていることを特徴とするロボットハンド。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、複数の指部材でワークを支持する力を検出するセンサを備えたロボットハンドに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来のロボットハンドとしては、例えば特許文献1~3に記載されているものがある。特許文献1に開示されたロボットハンドは、互いに接近または離間するように移動する一対の指部材を備え、指部材の先端部でワークを把持する構成が採られている。指部材の基端部は、力センサを介して駆動装置に支持されている。力センサは、指部材がワークを把持する際に指部材に加えられる力を検出する。
【0003】
特許文献2に開示されたロボットハンドは、一対の指部材と、これらの指部材の互いに対向する部分にばね部材を介して弾性支持された接触部材と、ばね部材の変位量を検出するセンサとを備えている。接触部材は、ワークと接触する部材である。ばね部材は、一対の指部材でワークを把持するときに接触部材に加えられる力で変位する。
【0004】
特許文献3に開示されたロボットハンドは、一対の指部材と、これらの指部材の互いに対向する部分であってワークと接触する部位に設けられた触覚センサとを備えている。触覚センサは、静電容量式圧力センサによって構成されている。
【先行技術文献】
【特許文献】
【0005】
特許第5543539号公報
特開平8-39474号公報
特開2012-127764号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に開示されている指部材は、片持ち支持式に駆動装置に支持されており、ワークを把持するときに基端部に対して先端側が倒れるように撓むおそれがある。指部材が撓むと、力センサの検出値が不正確になる。
このような指部材の撓みに起因する不具合は、特許文献2や特許文献3に開示されているように指部材のワークと接触する部分にセンサを設けることによりある程度は解消することができる。
【0007】
しかしながら、特許文献2に示すロボットハンドでは、接触部材がばね部材によって弾性支持されているから、ワークが例えば接触部材の端部に押し付けられた場合には、接触部材が指部材に対して傾斜することがある。このような場合には、ばね部材の変位する方向の力とは異なる方向の分力が発生してセンサの検出値が不正確になってしまう。すなわち、ワークを把持するときにワークが接触部材の端部に接触する場合と、ワークが接触部材の中央部に接触する場合とでセンサの検出値が異なるおそれがある。また、特許文献3に示すロボットハンドでは、触覚センサを構成する静電容量式圧力センサが高価であるため、製造コストが高くなってしまう。
【0008】
本発明の目的は、製造コストを低く抑えながら、指部材が撓むことによる影響を受けることがないとともに、ワークと接触する位置に依存することなく常に正確な把持力を検出することが可能なロボットハンドを提供することである。
【課題を解決するための手段】
【0009】
この目的を達成するために本発明に係るロボットハンドは、互いに接近または離間するワーク支持方向に移動することによりワークを押して支持する複数の指部材と、前記複数の指部材のうち少なくとも一つの指部材である押圧力検出用の指部材に設けられた押圧力検出機構とを備え、前記押圧力検出機構は、前記押圧力検出用の指部材に前記ワーク支持方向に延びる軸部材を介して前記ワーク支持方向へ移動自在に支持され、前記ワークを支持する際の押圧力を伝達する可動部材と、前記可動部材を前記ワークが支持される方向に付勢するばね部材と、前記ばね部材のばね力によって付勢された前記可動部材の前記ワーク支持方向への移動を規制する規制構造と、前記可動部材が前記ばね部材のばね力に抗して前記押圧力検出用の指部材に対して移動する際の移動量に応じて検出値が変化するセンサとを備えたものである。
【0010】
本発明は、前記ロボットハンドにおいて、前記指部材は、前記ワーク支持方向とは直交する方向に延びる棒状に形成され、前記軸部材は、前記押圧力検出用の指部材における、前記ワーク支持方向とは直交する方向の複数の位置にそれぞれ設けられているとともに、それぞれ前記指部材を貫通し、前記可動部材は、前記複数の軸部材が並ぶ方向に延びる板状に形成されているとともに、前記押圧力検出用の指部材の前記ワークと対向する一側部と前記ワーク支持方向に並ぶ状態で前記複数の軸部材が並ぶ方向の両端部において前記軸部材の一端部に固定され、前記規制構造は、前記軸部材の他端部に一体に移動するように取付けられて前記押圧力検出用の指部材と対向するストッパ部材を含み、前記ばね部材は、前記可動部材における前記複数の軸部材の間の部位を付勢していてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
5か月前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
16日前
UTM株式会社
搬送装置
5か月前
株式会社ツノダ
挟持工具
2か月前
株式会社ツノダ
挟持工具
1か月前
個人
ペットボトル用蓋開け具。
5か月前
川崎重工業株式会社
ハンド
2か月前
株式会社右川ゴム製造所
把持装置
25日前
個人
ロボットシステム
4か月前
学校法人立命館
ロボットハンド
1か月前
トヨタ自動車株式会社
関節機構
4か月前
株式会社不二越
ロボット
4か月前
トヨタ自動車株式会社
関節機構
4か月前
株式会社不二越
ロボット
6か月前
学校法人立命館
グリッパ
1か月前
個人
プーリーキー抜き治具
1か月前
オムロン株式会社
ロボットハンド
6か月前
個人
作業台
5か月前
川崎重工業株式会社
ロボット
6か月前
株式会社不二越
予測システム
2か月前
工機ホールディングス株式会社
作業機
3か月前
株式会社ダイヘン
情報処理装置
25日前
株式会社ダイヘン
画像生成装置
25日前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
国立大学法人東北大学
剛性可変連結体
5か月前
工機ホールディングス株式会社
作業機
3か月前
株式会社ダイヘン
画像生成装置
25日前
株式会社中村製作所
トルクドライバー
1か月前
株式会社共和製作所
ロボット用アーム
3日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ


































