TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2023166278
公報種別
公開特許公報(A)
公開日
2023-11-21
出願番号
2022077213
出願日
2022-05-09
発明の名称
剛性可変連結体
出願人
国立大学法人東北大学
代理人
個人
主分類
B25J
17/00 20060101AFI20231114BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
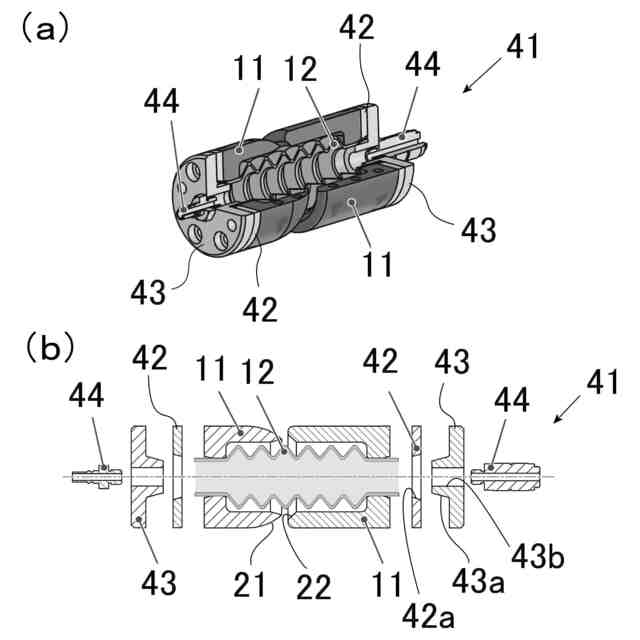
【課題】高剛性状態のときに各連結部材同士が分離するのを防ぐことができる剛性可変連結体を提供する。
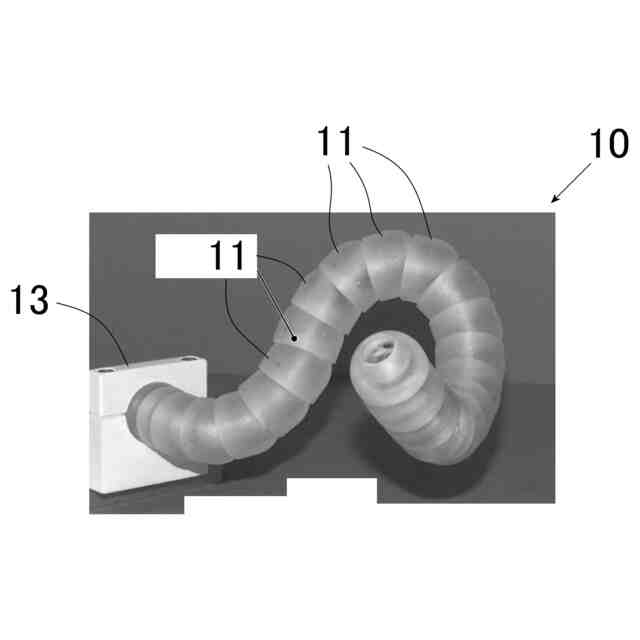
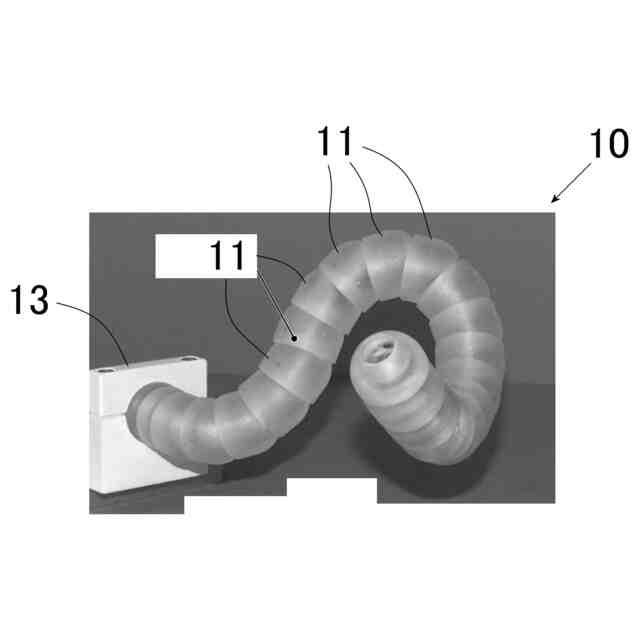
【解決手段】複数の連結部材11が、中央部に貫通孔23を有している。伸縮部材12が、細長く可撓性を有し、少なくとも伸長方向に沿って伸縮可能に構成されている。伸縮部材12は、各連結部材11の貫通孔23に挿入されて各連結部材11を一列に連結するよう設けられている。伸縮部材12を伸張方向に沿って縮めたとき、隣り合う連結部材11同士が密着する高剛性状態となり、伸縮部材12を伸張方向に沿って伸ばしたとき、隣り合う連結部材11の間に隙間があいた低剛性状態となるよう構成されている。各連結部材11は、高剛性状態のとき、隣り合う一方の連結部材11の貫通孔23の伸張方向と、他方の連結部材11の貫通孔23の伸張方向との成す角度が、所定の範囲内の任意の角度を成して密着可能に設けられている。
【選択図】図1
特許請求の範囲
【請求項1】
中央部に貫通孔を有する複数の連結部材と、
細長く可撓性を有し、少なくとも伸長方向に沿って伸縮可能に構成され、各連結部材の前記貫通孔に挿入されて各連結部材を一列に連結するよう設けられた伸縮部材とを有し、
前記伸縮部材を伸張方向に沿って縮めたとき、隣り合う連結部材同士が密着する高剛性状態となり、前記伸縮部材を伸張方向に沿って伸ばしたとき、隣り合う連結部材の間に隙間があいた低剛性状態となるよう構成されており、
各連結部材は、前記高剛性状態のとき、隣り合う一方の連結部材の前記貫通孔の伸張方向と、他方の連結部材の前記貫通孔の伸張方向との成す角度が、所定の範囲内の任意の角度を成して密着可能に設けられていることを
特徴とする剛性可変連結体。
続きを表示(約 710 文字)
【請求項2】
前記伸縮部材は、内部に流体を収納可能に設けられ、前記流体の圧力を調整することにより、伸長方向に沿って伸縮するよう構成されていることを特徴とする請求項1記載の剛性可変連結体。
【請求項3】
各連結部材は、前記伸縮部材の一方の端部側の表面に、ほぼ球面状に突出した球面部を有し、前記伸縮部材の他方の端部側の表面に凹面部を有し、前記高剛性状態のとき、隣り合う連結部材の前記球面部と前記凹面部とが面または線で接触して密着するよう構成されていることを特徴とする請求項1または2記載の剛性可変連結体。
【請求項4】
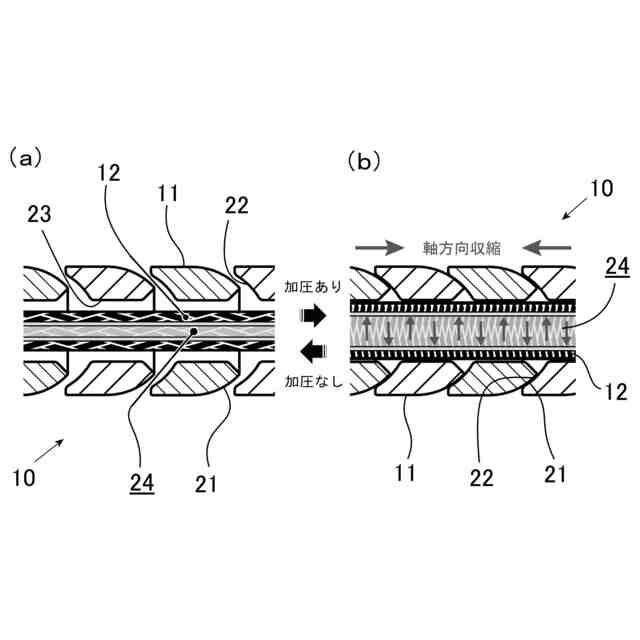
前記伸縮部材は、前記流体の圧力を高めたとき、伸張方向に対して垂直方向に膨張すると共に、伸張方向に沿って縮んで前記高剛性状態になり、前記流体の圧力を低下させたとき、伸張方向に対して垂直方向に収縮すると共に、伸張方向に沿って伸びて前記低剛性状態になるよう構成されていることを特徴とする請求項2記載の剛性可変連結体。
【請求項5】
前記伸縮部材は、人工筋肉から成ることを特徴とする請求項4記載の剛性可変連結体。
【請求項6】
前記伸縮部材は、前記流体の圧力を高めたとき、伸張方向に対して垂直方向に膨張すると共に、伸張方向に沿って伸びて前記低剛性状態になり、前記流体の圧力を低下させたとき、伸張方向に対して垂直方向に収縮すると共に、伸張方向に沿って縮んで前記高剛性状態になるよう構成されていることを特徴とする請求項2記載の剛性可変連結体。
【請求項7】
前記伸縮部材は、ベローズから成ることを特徴とする請求項4記載の剛性可変連結体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、剛性可変連結体に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
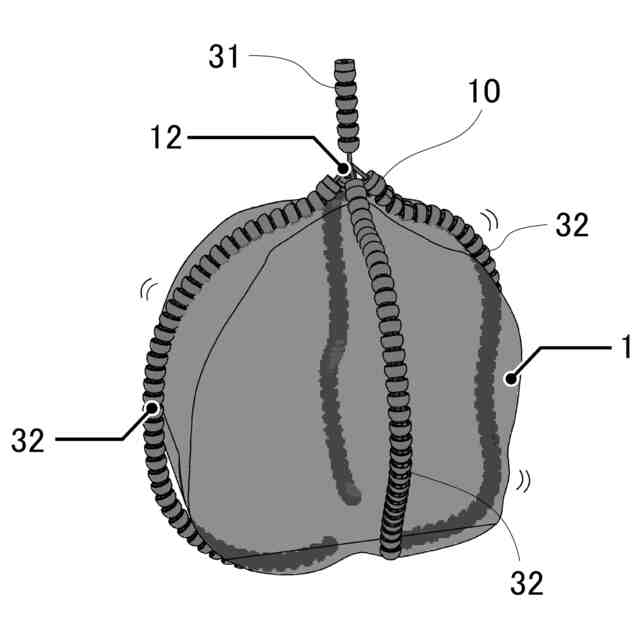
従来、外力を与えたときに変形しやすい柔軟な状態と、接触時に外部に力を伝えることが可能な高剛性の状態とを切り替える機構を利用したものとして、例えば、柔軟時に対象物に押し付けてその形状になじませ、その状態で高剛性に切り替えることにより、対象物を把持するグリッパなどがある。このようなグリッパとしては、例えば、粉体に負圧を与えることでジャミング転移現象を起こし、剛性を高めるもの(例えば、非特許文献1または2参照)や、数珠を通るワイヤに張力を加えることにより、剛性を高めるものがある(例えば、特許文献1、非特許文献3または4参照)。
【0003】
粉体を利用したものは、大変形が可能であり、対象物の形状に良くなじむという特徴を有しているが、負圧を利用するものであり、圧力を0.1MPa程度まで低下させるのが限界であるため、高剛性化に限界があるという問題があった。また、数珠にワイヤを通したものは、数珠を硬い材料で構成することにより、高強度化・高耐久化が可能であるという特徴を有しているが、長尺化すると、数珠とワイヤとの接触面積が増えるため、摩擦による力の損失が大きくなり、高剛性状態にするのが困難になるという問題があった。
【0004】
これらの問題を解決するために、高剛性状態のときの剛性をより高めることができ、長尺化しても容易に高剛性状態にすることができる剛性可変連結体が、本発明者等により開発されている(例えば、特許文献2参照)。この剛性可変連結体は、一列に並べて連結された複数の連結部材と、伸長方向に対して垂直方向に膨張および収縮可能に設けられた可撓性のチューブとを有し、各連結部材が挿入凸部と、挿入凸部を挿入可能に設けられた挿入凹部と、挿入凹部に連通し、挿入凸部を貫通して設けられた貫通孔とを有し、その貫通孔が連通するよう、隣り合う連結部材の挿入凹部に挿入凸部を挿入して連結され、連結された各連結部材の貫通孔にチューブが挿入されており、チューブを膨張させたとき、各連結部材の挿入凸部を、挿入した挿入凹部の内壁に押し付け可能に構成されている。
【先行技術文献】
【特許文献】
【0005】
特開2019-202376号公報
特開2021-160053号公報
【非特許文献】
【0006】
Yong-Jae Kim and Shanbao Cheng, “A Novel Layer Jamming Mechanism With Tunable Stiffness Capability for Minimally Invasive Surgery”, IEEE TRANSACTIONS ON ROBOTICS, August 2013, Vol. 29, No. 4, p.1031-1042
藤田政宏、藤本敏彰、清水杜織、高根英里、小松洋音、多田隈建二郎、昆陽雅司、田所諭、「房状ジャミング膜グリッパ機構」、ロボティクス・メカトロニクス講演会2018、June 2018、2P1-J06
Amir Degani and Howie Choset, “Highly Articulated Robotic Probe for Minimally Invasive Surgery”, IEEE International Conference on Robotics and Automation Orlando, May 2006, p.4167-4172
藤本敏彰、清水杜織、藤田政宏、高根英里、林聡輔、渡辺将広、多田隈建二郎、昆陽雅司、田所諭、「1次元柔剛切替メカニズムを活用したトーラスグリッパ機構-線状ジャミング転移機構を基軸とした構造例」、第36回日本ロボット学会学術講演会、2018年、RSJ2018A C3K1-01
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献2に記載の剛性可変連結体は、隣り合う連結部材の角度を変化可能であるため、伸長方向に対して垂直方向にチューブを収縮させておくことにより、各連結部材を曲げたり真っ直ぐにしたりすることができ、柔軟な状態にすることができる。また、伸長方向に対して垂直方向にチューブを膨張させることにより、各連結部材の挿入凸部を、挿入した挿入凹部の内壁に押し付け、挿入凸部と挿入凹部の内壁との間の摩擦で、隣り合う連結部材同士を固定し、全体の剛性を高めることができる。これにより、柔軟な状態で曲げたり真っ直ぐにしたりした各連結部材を、その形状のまま固定し、高剛性の状態にすることができる。
【0008】
このように、特許文献2に記載の剛性可変連結体は、チューブを膨張させて剛性を高めることができ、チューブの膨張圧をさらに高めることにより、高剛性状態のときの剛性をより高めることができる。しかし、チューブを膨張させたとき、チューブの伸長方向に対して垂直方向だけでなく、チューブの伸張方向にも膨張するため、隣の連結部材の挿入凹部に挿入された挿入凸部が、その挿入凹部から抜けて、連結部材同士が分離しやすいという課題があった。
【0009】
本発明は、このような課題に着目してなされたもので、高剛性状態のときに各連結部材同士が分離するのを防ぐことができる剛性可変連結体を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するために、本発明に係る剛性可変連結体は、中央部に貫通孔を有する複数の連結部材と、細長く可撓性を有し、少なくとも伸長方向に沿って伸縮可能に構成され、各連結部材の前記貫通孔に挿入されて各連結部材を一列に連結するよう設けられた伸縮部材とを有し、前記伸縮部材を伸張方向に沿って縮めたとき、隣り合う連結部材同士が密着する高剛性状態となり、前記伸縮部材を伸張方向に沿って伸ばしたとき、隣り合う連結部材の間に隙間があいた低剛性状態となるよう構成されており、各連結部材は、前記高剛性状態のとき、隣り合う一方の連結部材の前記貫通孔の伸張方向と、他方の連結部材の前記貫通孔の伸張方向との成す角度が、所定の範囲内の任意の角度を成して密着可能に設けられていることを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
5か月前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
16日前
UTM株式会社
搬送装置
5か月前
株式会社ツノダ
挟持工具
1か月前
個人
ペットボトル用蓋開け具。
5か月前
株式会社ツノダ
挟持工具
2か月前
川崎重工業株式会社
ハンド
2か月前
株式会社右川ゴム製造所
把持装置
25日前
個人
ロボットシステム
4か月前
株式会社不二越
ロボット
4か月前
トヨタ自動車株式会社
関節機構
4か月前
トヨタ自動車株式会社
関節機構
4か月前
株式会社不二越
ロボット
6か月前
学校法人立命館
ロボットハンド
1か月前
学校法人立命館
グリッパ
1か月前
個人
プーリーキー抜き治具
1か月前
オムロン株式会社
ロボットハンド
6か月前
個人
作業台
5か月前
株式会社不二越
予測システム
2か月前
川崎重工業株式会社
ロボット
6か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
4か月前
株式会社越智工業所
ブレーカ用カバー
4か月前
工機ホールディングス株式会社
作業機
3か月前
株式会社中村製作所
トルクドライバー
1か月前
株式会社ダイヘン
画像生成装置
25日前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社ダイヘン
画像生成装置
25日前
小倉クラッチ株式会社
ロボットハンド
4か月前
国立大学法人東北大学
剛性可変連結体
5か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社共和製作所
ロボット用アーム
3日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ


































