TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2023148555
公報種別
公開特許公報(A)
公開日
2023-10-13
出願番号
2022056652
出願日
2022-03-30
発明の名称
ロボット
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
19/00 20060101AFI20231005BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】他の装置に取り付けられた状態で搬送される場合でも、水平多関節ロボットアーム部が他の部材に干渉することを抑制できるロボットを提供する。
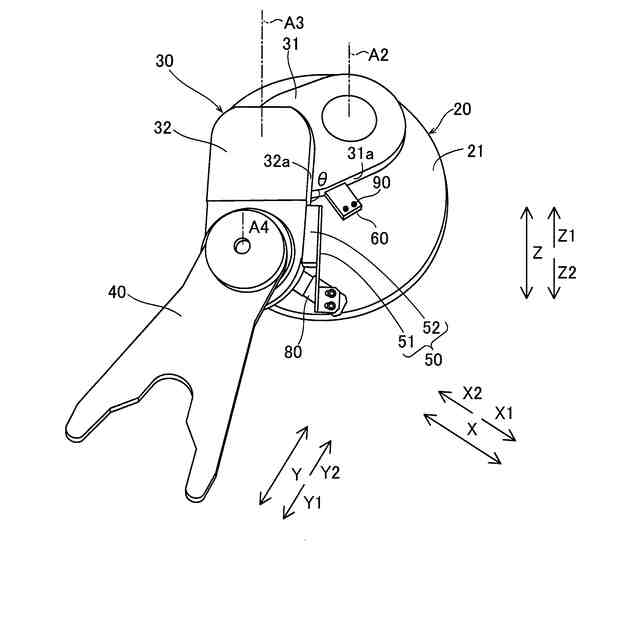
【解決手段】この基板搬送ロボット100は、ベース部20と、ベース部20に接続される水平多関節ロボットアーム部30と、ベース部20に取り付けられ、水平多関節ロボットアーム部30の使用時以外に水平多関節ロボットアーム部30の移動を規制するアーム移動規制治具50と、を備える。
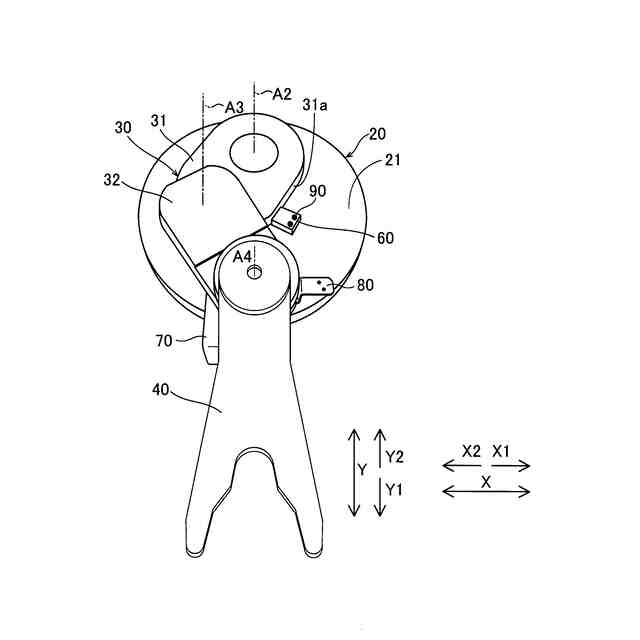
【選択図】図3
特許請求の範囲
【請求項1】
ベース部と、
前記ベース部に接続される水平多関節ロボットアーム部と、
前記ベース部に取り付けられ、前記水平多関節ロボットアーム部の使用時以外に前記水平多関節ロボットアーム部の移動を規制するアーム移動規制治具と、を備える、ロボット。
続きを表示(約 1,200 文字)
【請求項2】
前記アーム移動規制治具は、前記水平多関節ロボットアーム部の使用時以外に前記ベース部に取り付けられる、請求項1に記載のロボット。
【請求項3】
前記水平多関節ロボットアーム部は、
第1アーム部と、
前記第1アーム部の他方端部に接続される第2アーム部と、を含み、
前記アーム移動規制治具は、前記水平多関節ロボットアーム部が屈曲した状態での前記第1アーム部および前記第2アーム部の屈曲内側に配置されている、請求項1または請求項2に記載のロボット。
【請求項4】
前記アーム移動規制治具は、前記第1アーム部と前記第2アーム部とのうちの少なくとも一方の移動を規制する、請求項3に記載のロボット。
【請求項5】
前記アーム移動規制治具は、前記ベース部に取り付けられ、前記第2アーム部の回動を規制し、
前記ベース部に常時取り付けられ、前記第1アーム部の所定の範囲を越えた移動を規制するアームストッパをさらに備える、請求項4に記載のロボット。
【請求項6】
前記アーム移動規制治具は、前記水平多関節ロボットアーム部が屈曲した状態での、前記第2アーム部の屈曲内側に配置されており、
前記アームストッパは、前記水平多関節ロボットアーム部が屈曲した状態での、前記第1アーム部の屈曲内側に配置されている、請求項5に記載のロボット。
【請求項7】
前記水平多関節ロボットアーム部には、ハンドが取り付けられ、
前記水平多関節ロボットアーム部は、所定の方向に沿って前記ハンドを直動させ、
前記水平多関節ロボットアーム部が前記所定の方向に沿って延ばされることにより前記アームストッパが前記第1アーム部に当接された状態で、前記アーム移動規制治具は、前記第2アーム部に当接されるとともに前記ベース部に締結されている、請求項5または請求項6に記載のロボット。
【請求項8】
前記アームストッパのうちの少なくとも前記第1アーム部に当接する部分は、緩衝部材から形成されている、請求項5から請求項7までのいずれか1項に記載のロボット。
【請求項9】
前記アーム移動規制治具は、
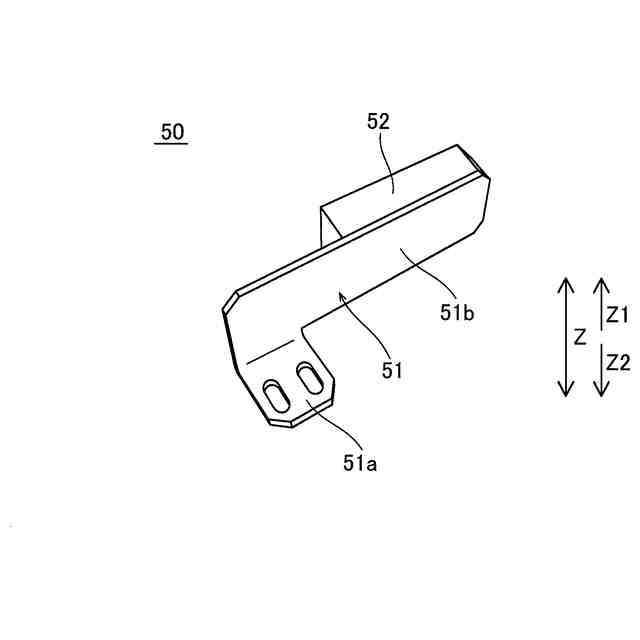
前記ベース部に締結される板金製の第1締結部と、
前記第2アーム部に当接する緩衝部材から形成されている第1緩衝部と、を含む、請求項3から請求項8までのいずれか1項に記載のロボット。
【請求項10】
前記アーム移動規制治具は、
屈曲した状態の前記第1アーム部および前記第2アーム部の屈曲内側に共通に配置され、
前記第1アーム部と前記第2アーム部との両方の移動を規制する、請求項3または請求項4に記載のロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、ロボットに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、水平多関節ロボットアーム部を備えるロボットが知られている。特許文献1では、水平多関節ロボットアーム部を備えるロボットと、ロボットを包装する包装容器が開示されている。特許文献1のロボットは、ベース部と、ベース部から水平方向に延びる水平多関節ロボットアーム部と、を備えている。包装容器は、段ボール製である。包装容器は、ベース部が固定される台座部と、ロボット全体を覆う蓋部と、を含む。また、包装容器は、水平多関節ロボットアーム部を台座部側から支持する第一支持部材と、水平多関節ロボットアーム部を蓋部の天板側から支持する第二支持部材と、を含む。水平多関節ロボットアーム部が第一支持部材と第二支持部材とに挟み込まれることによって、水平多関節ロボットアーム部の移動が規制されている。
【先行技術文献】
【特許文献】
【0003】
特開2014-240294号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載されるような従来のロボットは、段ボール製の包装容器に包装された状態で、出荷される。そして、出荷先で包装容器からロボットが取り出される。ここで、包装容器から取り出されたロボットが、半導体製造装置などの他の装置に取り付けられる場合がある。そして、ロボットが取り付けられた状態で他の装置が出荷される。この場合、ロボットは包装容器から取り出されているため、水平多関節ロボットアーム部の移動が規制されない。すなわち、他の装置に配置された状態でロボットが搬送される場合、水平多関節ロボットアーム部が移動してしまうため、水平多関節ロボットアーム部が他の部材に干渉するという問題点がある。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、他の装置に取り付けられた状態で搬送される場合でも、水平多関節ロボットアーム部が他の部材に干渉することを抑制できるロボットを提供することである。
【課題を解決するための手段】
【0006】
この開示の一の局面によるロボットは、ベース部と、ベース部に接続される水平多関節ロボットアーム部と、ベース部に取り付けられ、水平多関節ロボットアーム部の使用時以外に水平多関節ロボットアーム部の移動を規制するアーム移動規制治具と、を備える。
【0007】
この開示の一の局面によるロボットは、上記のように、ベース部に取り付けられ、水平多関節ロボットアーム部の使用時以外に水平多関節ロボットアーム部の移動を規制するアーム移動規制治具が配置されている。これにより、水平多関節ロボットアーム部の使用時以外に水平多関節ロボットアーム部の移動を規制するアーム移動規制治具がロボットの構成要素であるベース部に取り付けられているので、搬送時などの水平多関節ロボットアーム部の使用時以外に、水平多関節ロボットアーム部が移動することを抑制できる。その結果、ロボットが他の装置に取り付けられた状態で搬送される場合でも、水平多関節ロボットアーム部が他の部材に干渉することを抑制できる。
【発明の効果】
【0008】
本開示によれば、他の装置に取り付けられた状態で搬送される場合でも、水平多関節ロボットアーム部が他の部材に干渉することを抑制できる。
【図面の簡単な説明】
【0009】
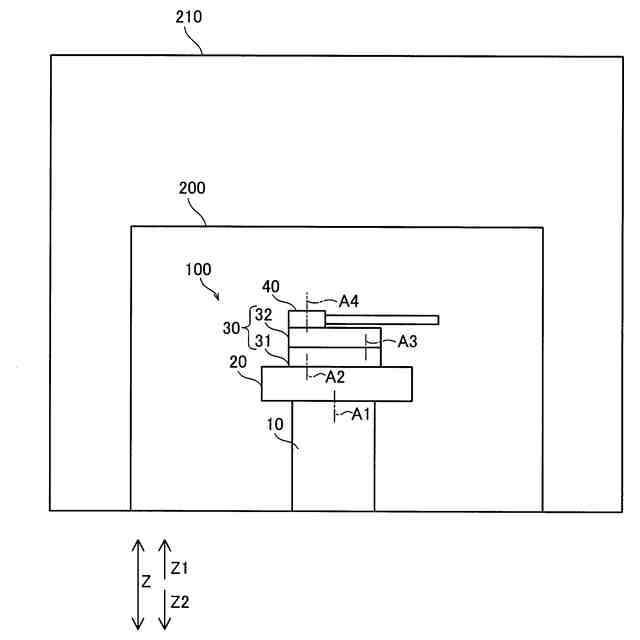
一実施形態によるクリーンルーム内に配置された半導体製造装置および基板搬送ロボットを示す図である。
一実施形態による基板搬送ロボットの構成を示す斜視図である。
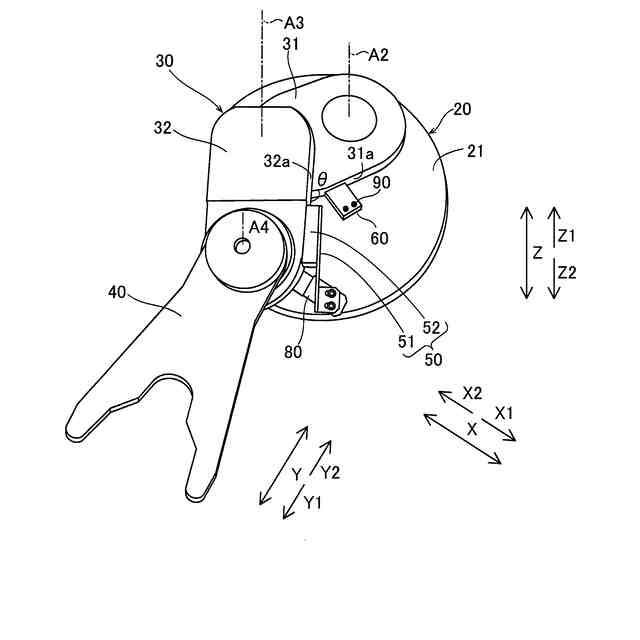
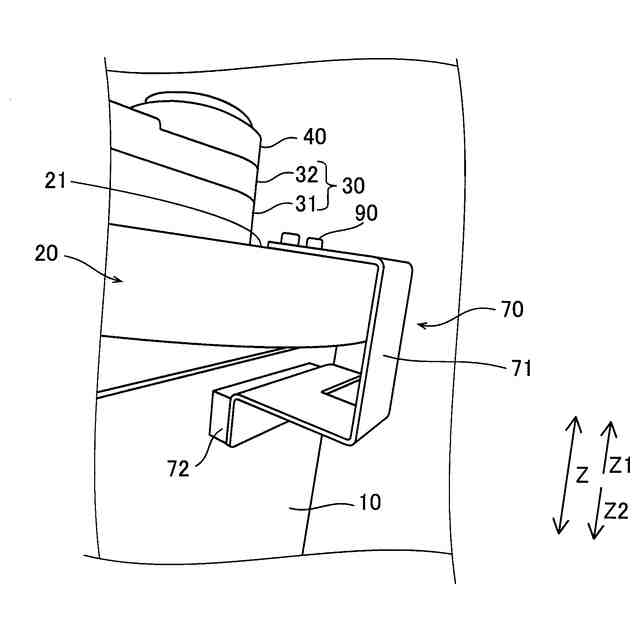
一実施形態による基板搬送ロボットのアーム移動規制治具が取り付けられた後の状態を示す図である。
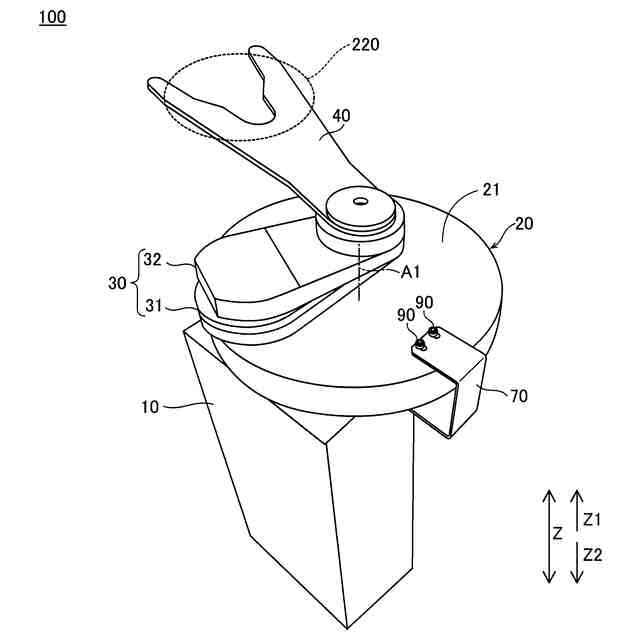
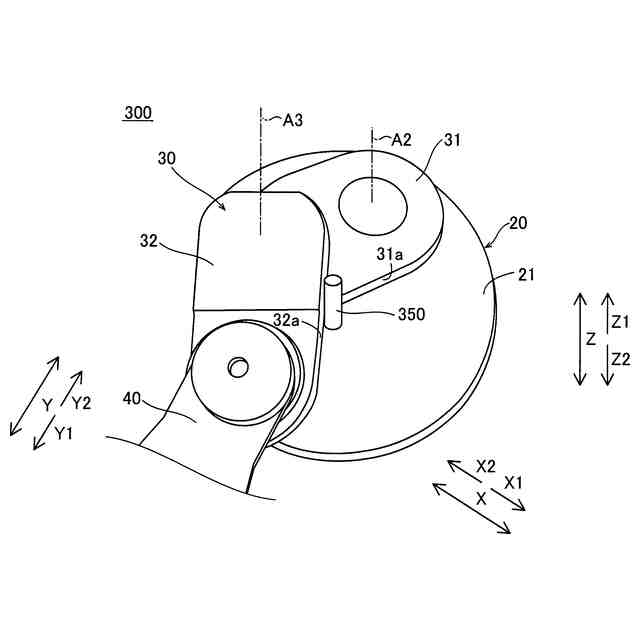
一実施形態による基板搬送ロボットのアーム移動規制治具が取り付けられる前の状態を示す図である。
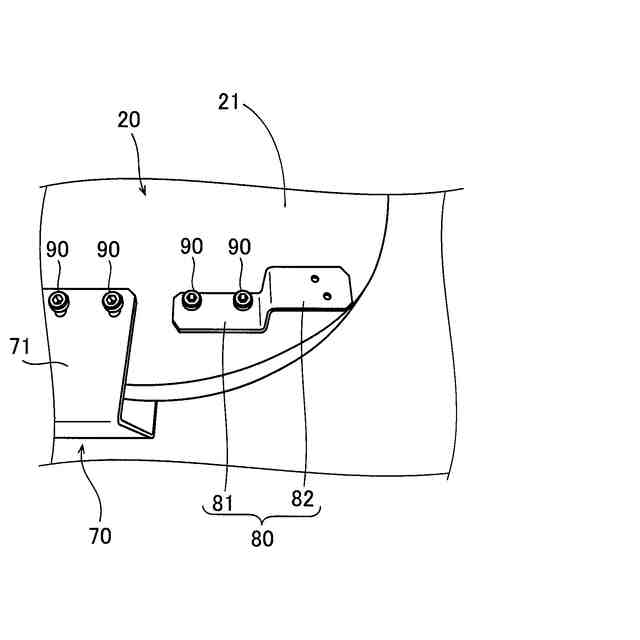
アーム移動規制治具が取り付けられる土台部を示す図である。
一実施形態によるアーム移動規制治具を示す図である。
ベース回動規制治具がベース部に取り付けられた状態を示す図である。
一実施形態によるベース回動規制治具を示す図である。
第1変形例によるアーム移動規制治具を示す斜視図である。
第2変形例によるアーム移動規制治具を示す斜視図である。
【発明を実施するための形態】
【0010】
以下、本開示を具体化した本開示の一実施形態を図面に基づいて説明する。なお、本願明細書において、上下方向をZ方向とする。上方側をZ1側とし、下方側をZ2側とする。Z方向に直交する方向をX方向とする。X方向の一方側をX1側とし、他方側をX2側とする。Z方向およびX方向に直交する方向をY方向とする。Y方向の一方側をY1側とし、他方側をY2側とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
5か月前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
16日前
UTM株式会社
搬送装置
5か月前
個人
ペットボトル用蓋開け具。
5か月前
株式会社ツノダ
挟持工具
1か月前
株式会社ツノダ
挟持工具
2か月前
川崎重工業株式会社
ハンド
2か月前
株式会社右川ゴム製造所
把持装置
25日前
個人
ロボットシステム
4か月前
学校法人立命館
ロボットハンド
1か月前
トヨタ自動車株式会社
関節機構
4か月前
トヨタ自動車株式会社
関節機構
4か月前
学校法人立命館
グリッパ
1か月前
株式会社不二越
ロボット
4か月前
個人
プーリーキー抜き治具
1か月前
個人
作業台
5か月前
株式会社不二越
予測システム
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社中村製作所
トルクドライバー
1か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
3か月前
株式会社ダイヘン
画像生成装置
25日前
株式会社ダイヘン
情報処理装置
25日前
小倉クラッチ株式会社
ロボットハンド
4か月前
国立大学法人東北大学
剛性可変連結体
5か月前
株式会社ダイヘン
画像生成装置
25日前
株式会社共和製作所
ロボット用アーム
3日前
株式会社越智工業所
ブレーカ用カバー
4か月前
工機ホールディングス株式会社
作業機
3か月前
株式会社不二越
ロボットシステム
4か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ