TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024022356
公報種別
公開特許公報(A)
公開日
2024-02-16
出願番号
2022125877
出願日
2022-08-05
発明の名称
ハンド
出願人
川崎重工業株式会社
代理人
個人
主分類
B25J
15/08 20060101AFI20240208BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ベルトの設けられた指を備えたハンドの利便性を向上させる。
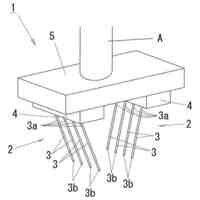
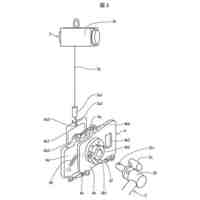
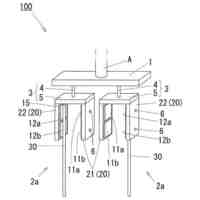
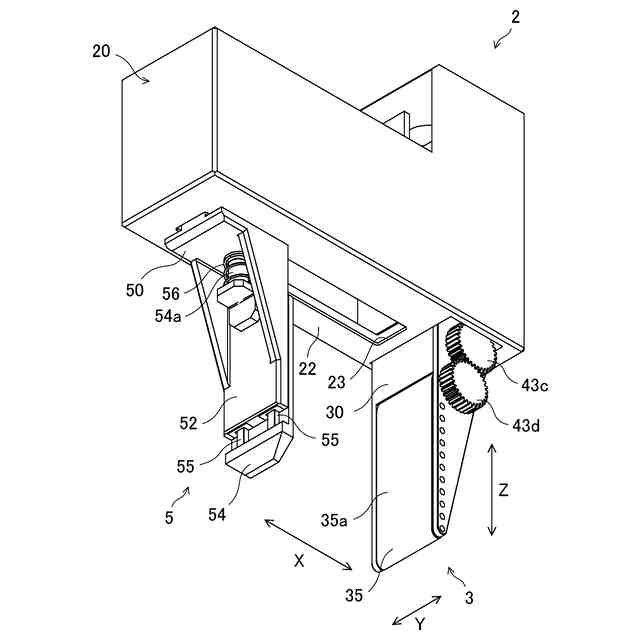
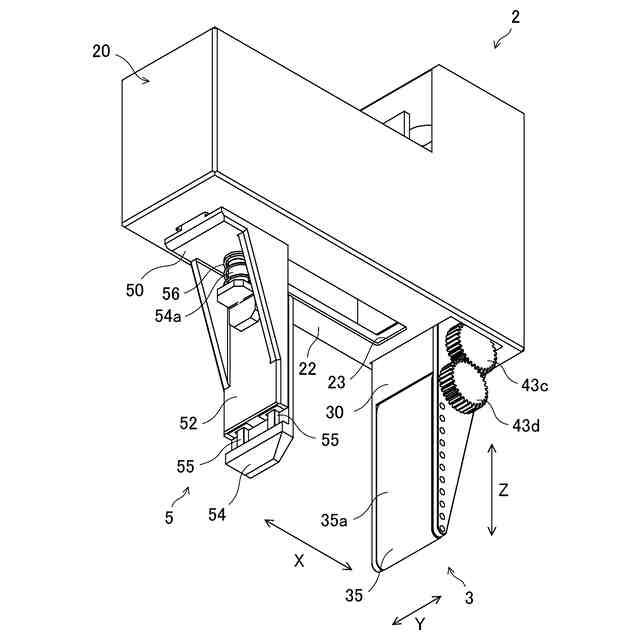
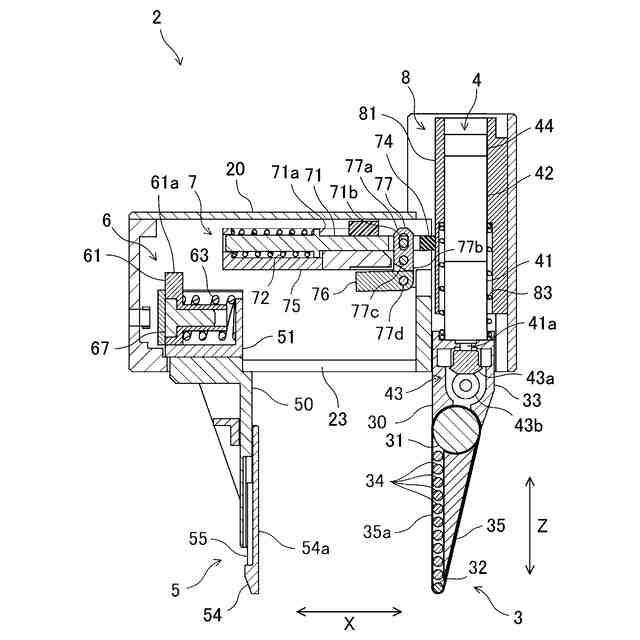
【解決手段】ハンド2は、ハンド本体20と、ハンド本体20に設けられた第1指3と、ハンド本体20に設けられた第2指5と、第1指3を第2指5から独立してハンド本体に対して所定の第1方向Zへ進退させる進退アクチュエータ4とを備えている。第1指3は、物品との接触面35aを形成し且つ接触面35aの面内方向において移動するベルト35を有する。
【選択図】図3
特許請求の範囲
【請求項1】
ハンド本体と、
前記ハンド本体に設けられた第1指と、
前記ハンド本体に設けられた第2指と、
前記第1指を前記第2指から独立して前記ハンド本体に対して所定の第1方向へ進退させる進退アクチュエータとを備え、
前記第1指は、物品との接触面を形成し且つ前記接触面の面内方向において移動するベルトを有するハンド。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載のハンドにおいて、
前記進退アクチュエータは、前記ベルトが前記接触面の面内方向において移動するように前記ベルトを駆動するハンド。
【請求項3】
請求項2に記載のハンドにおいて、
前記第1指を前記第1方向へ移動不能とする拘束状態と前記第1指を前記第1方向へ移動可能とする解放状態とで切り替える拘束器をさらに備えるハンド。
【請求項4】
請求項3に記載のハンドにおいて、
前記進退アクチュエータは、
前記拘束器の前記解放状態で且つ前記ベルトを他の物体に接触させた状態で前記ベルトを駆動することによって前記第1指を前記第1方向へ進退させる一方、
前記拘束器の前記拘束状態で且つ前記ベルトを物品に接触させた状態で前記ベルトを駆動することによって前記物品を前記接触面の面内方向において移動させるハンド。
【請求項5】
請求項4に記載のハンドにおいて、
前記他の物体は、前記第2指であるハンド。
【請求項6】
請求項3乃至5の何れか1つに記載のハンドにおいて、
前記第1指及び前記第2指の少なくとも一方を、前記第1指及び前記第2指の他方に対して接近又は離反するように前記ハンド本体に対して所定の第2方向へ移動させる開閉アクチュエータをさらに備え、
前記拘束器は、前記第1指を拘束する第1位置と前記第1指を解放する第2位置との間で移動可能なストッパと、前記ストッパを前記第2位置から前記第1位置の方へ付勢する第1弾性部材とを有し、
前記開閉アクチュエータは、前記第1指及び前記第2指の少なくとも一方を前記第2方向において前記第1指及び前記第2指の他方に対して接近する向きに移動させるときに、前記ストッパを前記第1弾性部材の弾性力に抗して前記第1位置から前記第2位置の方へ移動させることによって、前記拘束器を前記解放状態とするハンド。
【請求項7】
請求項6に記載のハンドにおいて、
前記開閉アクチュエータは、前記第1指及び前記第2指の全閉状態のときに、前記拘束器を前記解放状態とするハンド。
【請求項8】
請求項7に記載のハンドにおいて、
前記開閉アクチュエータは、
移動体と、前記移動体と前記第2指とを弾性的に連結する第2弾性部材と、前記移動体を移動させる駆動源とを有し、
前記駆動源により前記移動体を移動させることによって前記第2指を前記第2方向へ移動させ、
前記第2指を前記第1指に接触させた後、前記第2弾性部材の弾性力に抗して前記移動体をさらに移動させることによって、前記移動体により前記ストッパを前記第1位置から前記第2位置へ前記第1弾性部材の弾性力に抗して移動させて、前記拘束器を前記解放状態とするハンド。
【請求項9】
請求項8に記載のハンドにおいて、
前記拘束器は、前記ストッパに連結され、前記移動体の移動軌跡上に配置されるレバーをさらに有し、
前記移動体は、前記第2指を前記第1指に接触させた後、前記第2弾性部材の弾性力に抗してさらに移動したときに前記レバーを押圧することによって、前記ストッパを前記第1弾性部材の弾性力に抗して前記第1位置から前記第2位置の方へ移動させ、前記拘束器を前記解放状態とするハンド。
【請求項10】
請求項1に記載のハンドにおいて、
前記第1指を前記ハンド本体に対して前記第1方向へ移動可能に弾性的に支持する緩衝器をさらに備えるハンド。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
ここに開示された技術は、ハンドに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来より、物品と接触する接触面にベルトが設けられた指を備えたハンドが知られている。例えば、特許文献1に記載のハンドは、複数の指を備えている。各指において、物品と接触する接触面にベルトが設けられている。ベルトに物品が接触した状態でベルトが駆動されると、物品はベルトと共に移動する。これにより、物品は、ベルトの移動方向へ引き込まれる。
【先行技術文献】
【特許文献】
【0003】
特開2016-30316号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、前述のようなベルトが設けられた指を備えたハンドは、物品を単純に把持するだけでなく、物品の引き込みなどの用途に使用され得る。しかしながら、このようなハンドの活用の可能性はまだまだ残っている。つまり、ハンドの構成を改良することによって、ハンドの利便性がさらに向上する可能性がある。
【0005】
ここに開示された技術は、かかる点に鑑みてなされたものであり、その目的とするところは、ベルトの設けられた指を備えたハンドの利便性を向上させることにある。
【課題を解決するための手段】
【0006】
本開示のハンドは、ハンド本体と、前記ハンド本体に設けられた第1指と、前記ハンド本体に設けられた第2指と、前記第1指を前記第2指から独立して前記ハンド本体に対して所定の第1方向へ進退させる進退アクチュエータとを備え、前記第1指は、物品との接触面を形成し且つ前記接触面の面内方向において移動するベルトを有する。
【発明の効果】
【0007】
本開示のハンドによれば、ベルトが設けられた指の利便性を向上させることができる。
【図面の簡単な説明】
【0008】
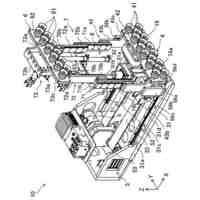
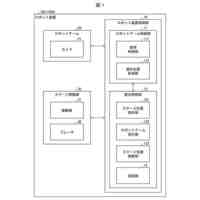
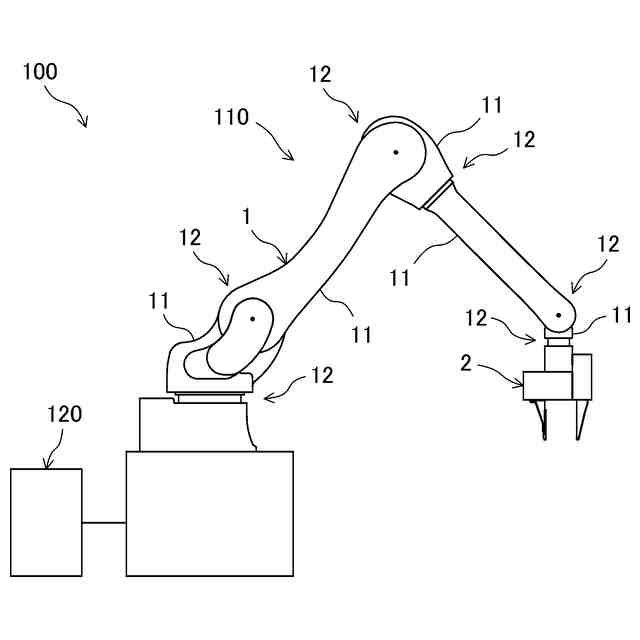
図1は、ロボットシステムの構成を示す模式図である。
図2は、ハンドの正面図である。
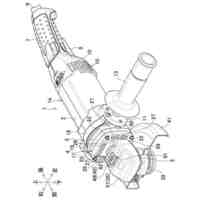
図3は、ハンドの斜視図である。
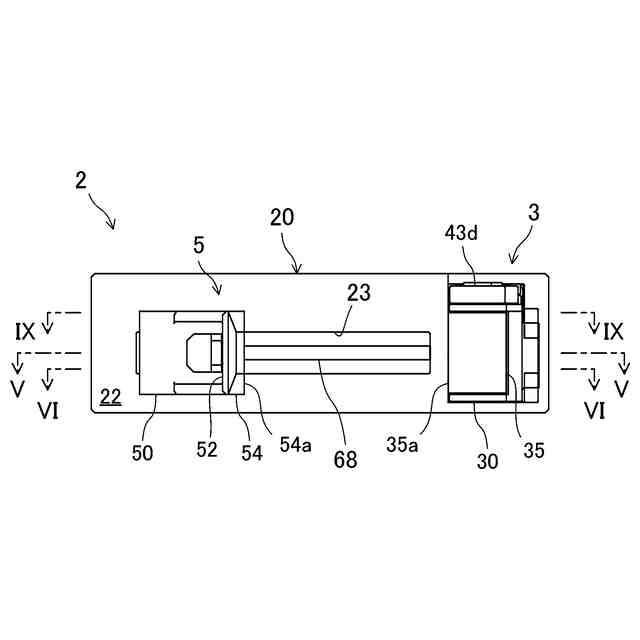
図4は、ハンドの底面図である。
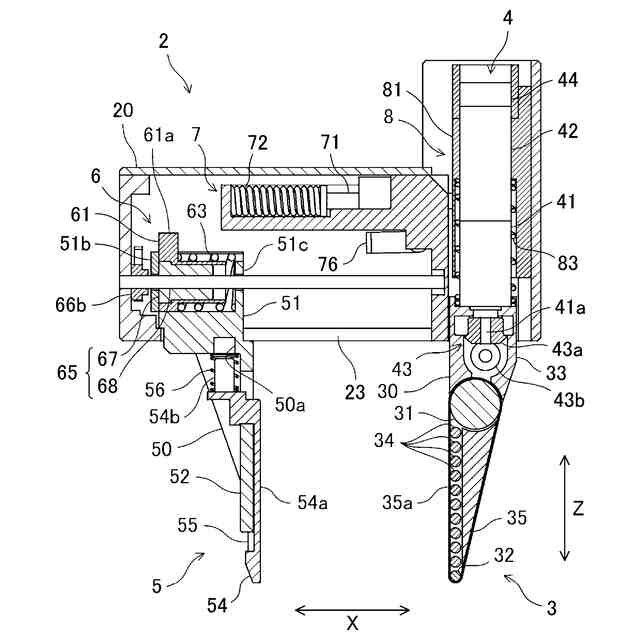
図5は、図4のV-V線におけるハンドの断面図である。
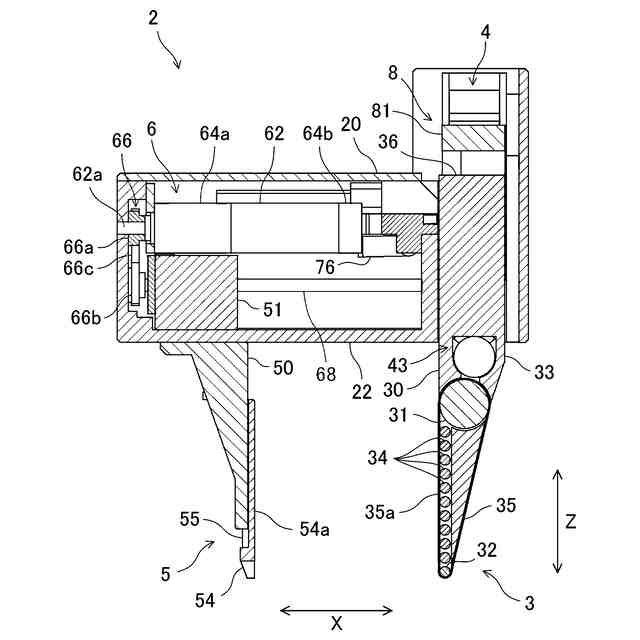
図6は、図4のVI-VI線におけるハンドの断面図である。
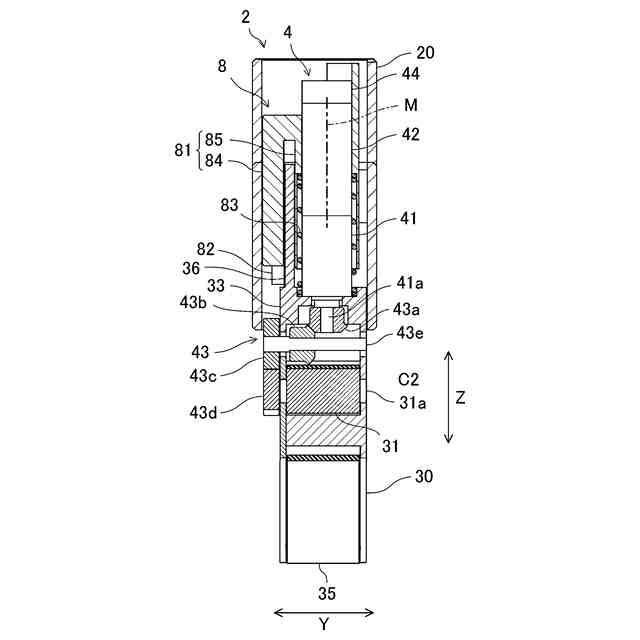
図7は、図2のVII-VII線におけるハンドの断面図である。
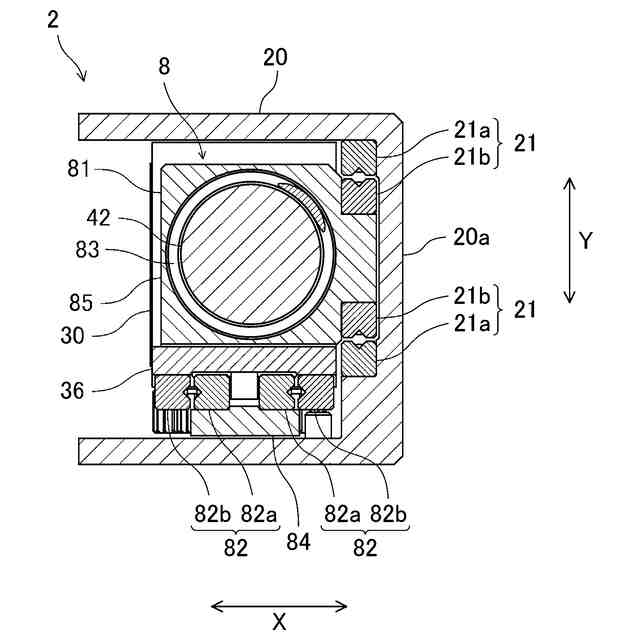
図8は、図2のVIII-VIII線におけるハンドの部分的な断面図である。
図9は、図4のIX-IX線におけるハンドの断面図である。
図10は、全閉状態におけるハンドの、図5に相当する断面図である。
図11は、拘束器が拘束状態から解放状態に切り替わるときのハンドの、図6に相当する断面図である。
図12は、制御装置の概略的なハードウェア構成を示すブロック図である。
図13は、進退動作を説明するためのハンドの、図6に相当する断面図である。
図14は、進退動作完了時の動作を説明するためのハンドの模式的な正面図である。
図15は、把持動作を説明するためのハンドの模式的な正面図である。
図16は、緩衝器8の動作を説明するためのハンドの、図5に相当する断面図である。
図17は、引き込み把持の開始時の状態を説明するためのハンドの説明図である。
図18は、引き込み把持の途中の状態を説明するためのハンドの説明図である。
図19は、引き込み把持の完了時の状態を説明するためのハンドの説明図である。
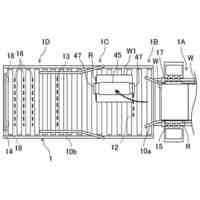
図20は、ハンドによる物品Wの引き込みの一例を説明するための説明図である。
図21は、ハンドによる物品Wの引き込みの別の例を説明するための説明図である。
【発明を実施するための形態】
【0009】
以下、例示的な実施形態を図面に基づいて詳細に説明する。
【0010】
図1は、ロボットシステム100の構成を示す模式図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
5か月前
個人
ねじ締め装置
4か月前
株式会社フジキン
レンチ
6か月前
日東精工株式会社
搬送装置
16日前
個人
ペットボトル用蓋開け具。
5か月前
株式会社ツノダ
挟持工具
1か月前
株式会社ツノダ
挟持工具
2か月前
UTM株式会社
搬送装置
5か月前
株式会社右川ゴム製造所
把持装置
25日前
川崎重工業株式会社
ハンド
7か月前
川崎重工業株式会社
ハンド
7か月前
川崎重工業株式会社
ハンド
2か月前
個人
ロボットシステム
4か月前
トヨタ自動車株式会社
関節機構
4か月前
学校法人立命館
グリッパ
7か月前
オムロン株式会社
搬送システム
7か月前
学校法人立命館
グリッパ
1か月前
トヨタ自動車株式会社
関節機構
4か月前
株式会社不二越
ロボット
4か月前
株式会社マキタ
電動工具
7か月前
オムロン株式会社
ロボット装置
7か月前
株式会社不二越
ロボット
6か月前
学校法人立命館
ロボットハンド
1か月前
川崎重工業株式会社
整列システム
7か月前
学校法人立命館
箸グリッパ
7か月前
オムロン株式会社
ロボットハンド
6か月前
個人
作業台
5か月前
個人
プーリーキー抜き治具
1か月前
川崎重工業株式会社
ロボット
6か月前
株式会社近藤製作所
ロータリージョイント
6か月前
株式会社不二越
予測システム
2か月前
学校法人立命館
ロボット装置
7か月前
工機ホールディングス株式会社
作業機
4か月前
株式会社ダイヘン
画像生成装置
25日前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
4か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ