TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2023130606
公報種別
公開特許公報(A)
公開日
2023-09-21
出願番号
2022034988
出願日
2022-03-08
発明の名称
箸グリッパ
出願人
学校法人立命館
代理人
個人
,
個人
主分類
B25J
15/08 20060101AFI20230913BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】対象物と接地面との間に指部を挿入でき、対象物環境に指部が接触してもロボットアームの負担が少ないグリッパを提供すること。
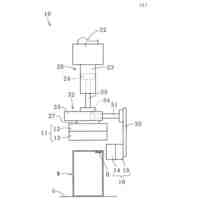
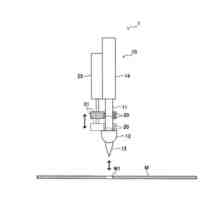
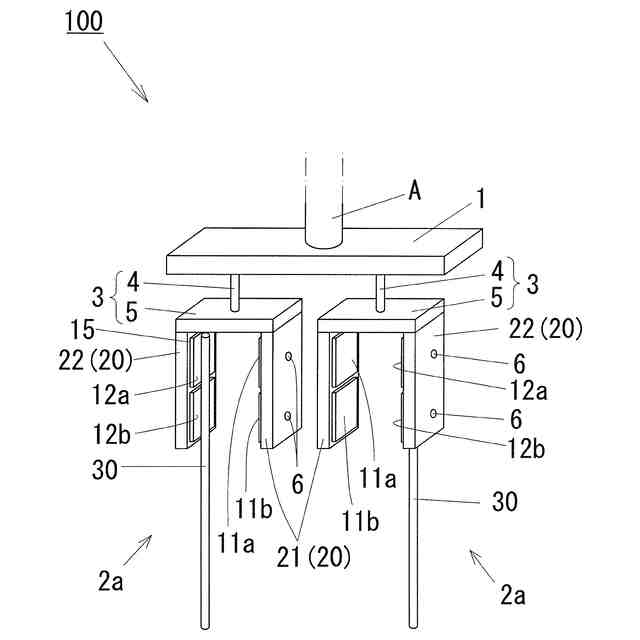
【解決手段】ロボットアームAに接続されるフランジ部1と、対象物Oを把持する指部2a,2bと、フランジ部1と指部2a,2bとを繋ぐ接合部3と、を有し、指部2a,2bは、空気により略半球状に膨張収縮する複数の柔軟膜10と、柔軟膜10を固定する支持台20と、柔軟膜10の縁端15が支持台20に固定され、柔軟膜10を膨張収縮させる手段と、対象物Oを掴む棒状の箸部30と、を具備し、支持台20は、内部支持台21と、外部支持台22と、を備え、内部支持台21に固定された内部柔軟膜11の膨張する方向と、外部支持台22に固定された外部柔軟膜12の膨張する方向と、が相対しており、箸部30は、柔軟膜10の膨張する側に取り付けられていることを特徴としたこと。
【選択図】図1
特許請求の範囲
【請求項1】
ロボットアームに接続されるフランジ部と、
対象物を把持する指部と、
前記フランジ部と前記指部とを繋ぐ接合部と、を有し、
前記指部は、空気により略半球状に膨張収縮する複数の柔軟膜と、
前記柔軟膜を固定する支持台と、
前記柔軟膜を膨張収縮させる手段と、
前記対象物を掴む棒状の箸部と、を具備し、
前記支持台は、内部支持台と、外部支持台と、を備え、
前記内部支持台に固定された内部柔軟膜の膨張する方向と、前記外部支持台に固定された外部柔軟膜の膨張する方向と、が相対しており、
前記箸部は、前記柔軟膜の膨張する側に取り付けられていることを特徴とする箸グリッパ。
続きを表示(約 1,300 文字)
【請求項2】
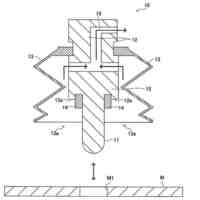
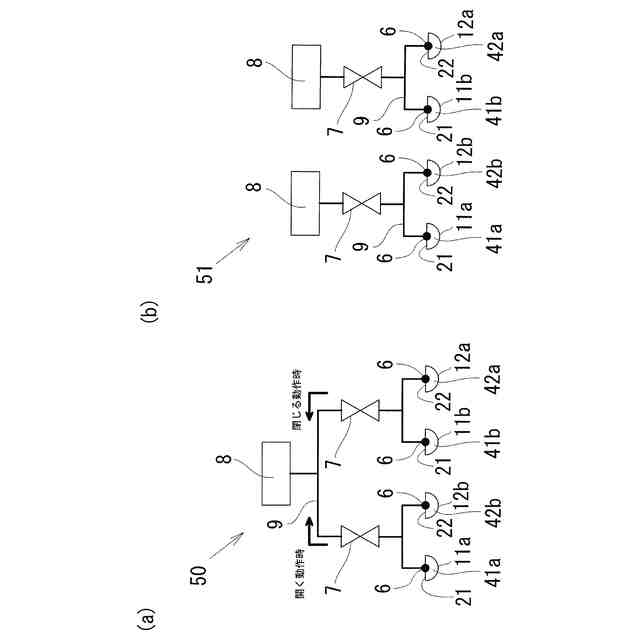
前記膨張収縮させる手段は、前記柔軟膜の縁端が前記支持台に固定され、前記柔軟膜と前記支持台とから形成される空間に繋がる孔部に空気を送気及び脱気することで膨張収縮することを特徴とする請求項1に記載の箸グリッパ。
【請求項3】
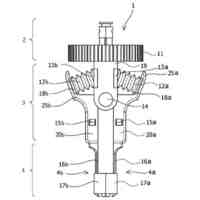
前記内部支持台及び前記外部支持台は、板状であって、互いに平行しており、
前記接合部は、前記内部支持台の上部と前記外部支持台の上部とを接続する接合板を具備し、
前記内部柔軟膜は、上下に2つ並んだ上方内部柔軟膜と下方内部柔軟膜とを具備し、
前記外部柔軟膜は、それぞれ前記上方内部柔軟膜と前記下方内部柔軟膜と高さ位置が同じであって、上下に2つ並んだ上方外部柔軟膜と上方外部柔軟膜とを具備していることを特徴とする請求項1または請求項2に記載の箸グリッパ。
【請求項4】
前記内部支持台及び前記外部支持台は、板状であって、互いに平行しており、
前記接合部は、前記内部支持台の上部と前記外部支持台の上部とを接続する接合板を具備し、
前記内部柔軟膜は、上下に2つ並んだ上方内部柔軟膜と下方内部柔軟膜とを具備し、
前記外部柔軟膜は、前記上方内部柔軟膜と前記下方内部柔軟膜との間の高さ位置に固定されていることを特徴とする請求項1または請求項2に記載の箸グリッパ。
【請求項5】
前記指部は、2本であることを特徴とする請求項1から請求項4のいずれか一項に記載の箸グリッパ。
【請求項6】
前記外部支持台は中空角柱状または円筒形状であって、前記内部支持台は棒状であって、
前記外部支持台及び前記内部支持台は、前記外部支持台の中空部に前記内部支持台が挿通して前記接合部又は前記フランジ部に接続され、
前記外部柔軟膜は、リング状のトーラス型外部柔軟膜であって、
前記内部柔軟膜は、前記トーラス型外部柔軟膜より高い位置に固定された第1内部柔軟膜と、
前記トーラス型外部柔軟膜と相対する位置に固定された第2内部柔軟膜と、
前記トーラス型外部柔軟膜より低い位置に固定された第3内部柔軟膜と、から形成されていることを特徴とする請求項1または請求項2に記載の箸グリッパ。
【請求項7】
前記外部支持台は中空角柱状または円筒形状であって、前記内部支持台は棒状であって、
前記外部支持台及び前記内部支持台は、前記外部支持台の中空部に前記内部支持台が挿通して前記接合部又は前記フランジ部に接続されており、
前記外部柔軟膜は、リング状のトーラス型外部柔軟膜であって、
前記内部柔軟膜は、前記内部支持台上において上下移動する昇降型内部柔軟膜であることを特徴とする請求項1または請求項2に記載の箸グリッパ。
【請求項8】
前記箸部は、3本以上であることを特徴とする請求項6または請求項7に記載の箸グリッパ。
【請求項9】
前記箸部は、ステンレス製であることを特徴とする請求項1から請求項8のいずれか一項に記載の箸グリッパ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、メンテンナンスが容易であって、対象物環境との接触を避けられない対象物を把持するためのロボットアーム先端に取り付けられる箸グリッパに関するものである。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、食品産業における様々な作業は、人手に頼っていることが多く、自動化が切望されている。食品産業においては、異物混入や食品適合性の要求があるため。ロボットエンドエフェクタを設計する際に、材質や形状を考慮する必要がある。また、様々な食品は形状や物理特性のばらつきが大きく、柔らかくて脆弱なものや薄くてすべりやすいものも多数存在し、これらの対象物をうまくハンドリングできるロボットハンドエンドエフェクタが求められる。
【0003】
特許文献1では、対象物を把持するロボットハンドであって、対象物の隙間に指部を挿入し、対象物を把持するロボットハンドが記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2021-154440
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、特許文献1に記載のロボットハンドでは、床面と対象物との間に指部を挿入することはできず、対象物環境に指部が接触した場合、硬い関節を有するロボットアームに負担が大きかった。
【0006】
そこで、本発明は上記事情を鑑みたものであって、対象物と接地面との間に指部を挿入でき、対象物環境に指部が接触してもロボットアームの負担が少ないグリッパを提供するものである。
【課題を解決するための手段】
【0007】
本発明に係る箸グリッパは、ロボットアームに接続されるフランジ部と、対象物を把持する指部と、前記フランジ部と前記指部とを繋ぐ接合部と、を有し、前記指部は、空気により略半球状に膨張収縮する複数の柔軟膜と、前記柔軟膜を固定する支持台と、前記柔軟膜が膨張収縮する手段と、前記対象物を掴む棒状の箸部と、を具備し、前記支持台は、内部支持台と、外部支持台と、を備え、前記内部支持台に固定された内部柔軟膜の膨張する方向と、前記外部支持台に固定された外部柔軟膜の膨張する方向と、が相対しており、前記箸部は、前記内部柔軟膜と前記外部柔軟膜との間に取り付けられていることを特徴とする。
【0008】
また、前記膨張収縮する手段は、前記柔軟膜の縁端が前記支持台に固定され、前記柔軟膜と前記支持台とから形成される空間に繋がる孔部に空気を送気及び脱気することで膨張収縮することを特徴とする。
【0009】
さらに、前記内部支持台及び前記外部支持台は、板状であって、互いに平行しており、前記接合部は、前記内部支持台の上部と前記外部支持台の上部とを接続する接合板を具備し、前記内部柔軟膜は、上下に2つ並んだ上方内部柔軟膜と下方内部柔軟膜とを具備し、前記外部柔軟膜は、それぞれ前記上方内部柔軟膜と前記下方内部柔軟膜と高さ位置が同じであって、上下に2つ並んだ上方外部柔軟膜と上方外部柔軟膜とを具備していることを特徴とする。
【0010】
さらに、前記内部支持台及び前記外部支持台は、板状であって、互いに平行しており、前記接合部は、前記内部支持台の上部と前記外部支持台の上部とを接続する接合板を具備し、前記内部柔軟膜は、上下に2つ並んだ上方内部柔軟膜と下方内部柔軟膜とを具備し、前記外部柔軟膜は、前記上方内部柔軟膜と前記下方内部柔軟膜との間の高さ位置に固定されていることを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日東精工株式会社
搬送装置
27日前
株式会社ツノダ
挟持工具
1か月前
株式会社右川ゴム製造所
把持装置
1か月前
学校法人立命館
グリッパ
1か月前
学校法人立命館
ロボットハンド
2か月前
個人
プーリーキー抜き治具
1か月前
CKD株式会社
電動把持装置
6日前
東京都公立大学法人
ロボットハンド
1日前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社ダイヘン
画像生成装置
1か月前
株式会社ダイヘン
情報処理装置
1か月前
株式会社ダイヘン
画像生成装置
1か月前
株式会社共和製作所
ロボット用アーム
14日前
株式会社中村製作所
トルクドライバー
2か月前
西部電機株式会社
吸着装置
28日前
西部電機株式会社
吸着装置
28日前
株式会社豆蔵
ロボットハンド
1か月前
株式会社マキタ
電動工具
1か月前
個人
力制限減震装置
1か月前
トヨタ自動車東日本株式会社
吸着治具
22日前
トヨタ自動車東日本株式会社
吸着治具
22日前
株式会社不二越
ロボット制御システム
20日前
川崎重工業株式会社
クリーンロボット
2か月前
株式会社不二越
ロボット制御システム
28日前
トヨタ自動車株式会社
ティーチングシステム
1か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
川崎重工業株式会社
ロボットシステム
6日前
工機ホールディングス株式会社
作業機
1日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
電気機器
1か月前
株式会社FUJI
工作機械のワーク自動搬送機
1か月前
THK株式会社
ロボットシステム
1か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ