TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024032108
公報種別
公開特許公報(A)
公開日
2024-03-12
出願番号
2022135569
出願日
2022-08-29
発明の名称
工作機械のワーク自動搬送機
出願人
株式会社FUJI
代理人
個人
主分類
B25J
15/00 20060101AFI20240305BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】動力を停止させたときのロボットハンドで把持したワークの落下を防止する工作機械のワーク自動搬送機を提供すること。
【解決手段】ワークを把持する表裏一対のチャックを備えたロボットハンドと、前記ロボットハンドを所定の位置に移動させる搬送装置と、前記ロボットハンドおよび前記搬送装置の駆動を制御するものであって、動力停止時に前記チャックによるワークの把持状態に応じて前記ロボットハンドの向きを変更する制御装置と、を有する工作機械のワーク自動搬送機。
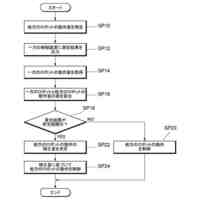
【選択図】図6
特許請求の範囲
【請求項1】
ワークを把持する表裏一対のチャックを備えたロボットハンドと、
前記ロボットハンドを所定の位置に移動させる搬送装置と、
前記ロボットハンドおよび前記搬送装置の駆動を制御するものであって、動力停止時に前記チャックによるワークの把持状態に応じて前記ロボットハンドの向きを変更する制御装置と、
を有する工作機械のワーク自動搬送機。
続きを表示(約 330 文字)
【請求項2】
前記制御装置は、前記表裏一対のチャックのうち一方にワークが把持されていた場合には、動力停止時に当該チャックを上向きの配置に変更する請求項1に記載する工作機械のワーク自動搬送機。
【請求項3】
前記制御装置は、前記表裏一対のチャックの両方にワークが把持されていた場合には、動力停止時に当該両チャックを横向きの配置に変更する請求項1または請求項2に記載する工作機械のワーク自動搬送機。
【請求項4】
前記制御装置は、前記表裏一対のチャックの両方にワークが把持されていた場合には、動力停止時に当該両チャックを横向きの配置に変更するとともに、注意情報を発出する請求項1または請求項2に記載する工作機械のワーク自動搬送機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、表裏一対のチャックを備えたロボットハンドを有し、動力を停止させたときのロボットハンドで把持したワークの落下防止機能を備えた工作機械のワーク自動搬送機に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
工作機械には、搬送したワークを対応チャックなどとの間で受け渡しを可能にするワーク自動搬送機が用いられている。ワーク自動搬送機は、ワークを把持するためのロボットハンドを有し、油圧などを利用したチャックの把持動作によってワークを把持することができるようになっている。そうしたワークを把持することができるロボットハンドには落下防止機構が設けられ、下記特許文献1にもワークの脱落防止機能に関する発明が開示されている。そのワーク脱落防止手段は、エアポンプが停止した時にコイルスプリングの付勢力によって突出した突出棒が可動芯の伸長動作を制限し、リンク手段を介して連動する指状体の開放動作を停止させることによりワークの把持状態を維持するものである。
【先行技術文献】
【特許文献】
【0003】
特開2004-276166号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
工作機械に設けられているワーク自動搬送機は、ワーク加工のサイクルタイムの短縮のため高速移動させる必要から、ロボットハンドが軽量であることが望まれる。しかし、前記従来例のようなロボットハンドは、リンク手段などによって指状体の開放動作を機械的に停止させるようにした構成である。そのため、部品点数が多くなってしまい、ロボットハンドが大きくなるだけではなく重量も増えてしまい高速化が困難になる。また、コイルスプリングの付勢力などによってワークの把持力を維持することは、ある程度の効果を発揮するものの、ワークの落下を確実に防止することはできない。そして、把持したワークがロボットハンドから落ちてしまうようなことがあれば、ワーク自体を傷つけるだけではなく、工作機械を破損させてしまうことにもなる。
【0005】
そこで、本発明は、かかる課題を解決すべく、動力を停止させたときのロボットハンドで把持したワークの落下を防止する工作機械のワーク自動搬送機を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明に係る工作機械のワーク自動搬送機は、ワークを把持する表裏一対のチャックを備えたロボットハンドと、前記ロボットハンドを所定の位置に移動させる搬送装置と、前記ロボットハンドおよび前記搬送装置の駆動を制御するものであって、動力停止時に前記チャックによるワークの把持状態に応じて前記ロボットハンドの向きを変更する制御装置と、を有する。
【発明の効果】
【0007】
前記構成によれば、表裏一対のチャックを備えたロボットハンドによってワークを把持し、そのワークを搬送装置を駆動させることにより所定の位置に移動させることができるほか、動力停止時には、チャックによるワークの把持状態に応じてロボットハンドの向きを変更することにより、ワークの把持力が低下してしまったとしてもワークの落下を防止することができる。
【図面の簡単な説明】
【0008】
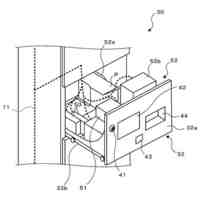
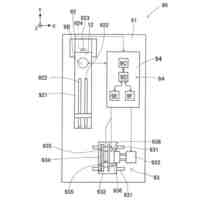
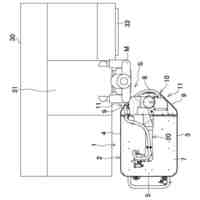
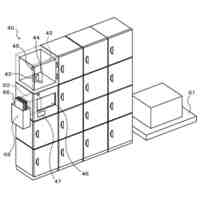
工作機械におけるワーク自動搬送機の一実施形態を示した斜視図である。
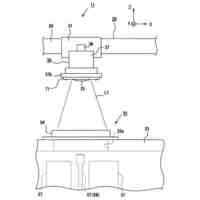
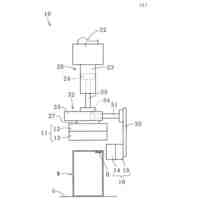
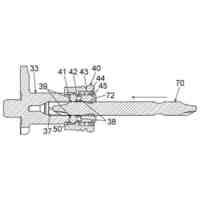
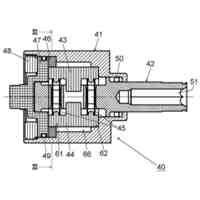
ワーク自動搬送機の一実施形態を示した側面図である。
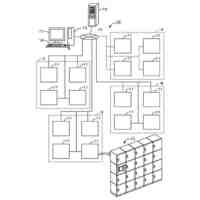
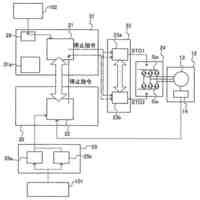
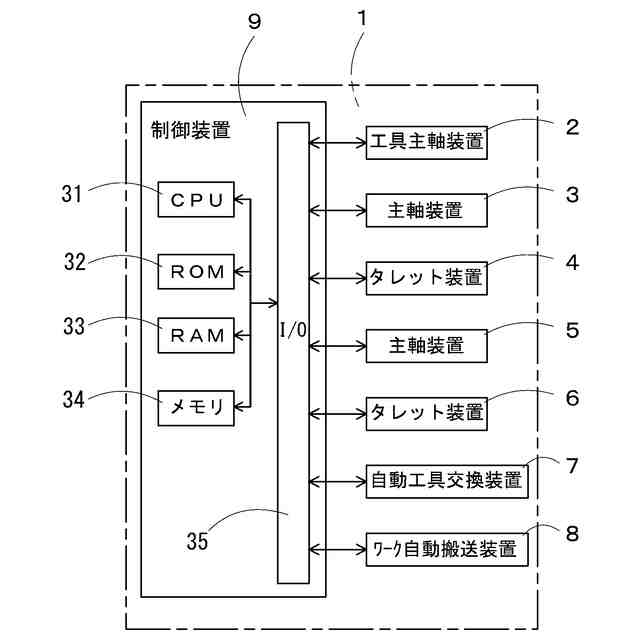
工作機械を制御する制御システムを示したブロック図である。
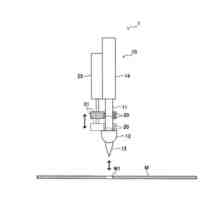
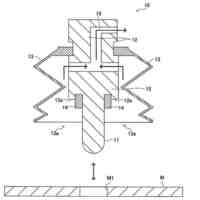
ロボットハンドにおける落下防止動作を簡易的に示した図である。
ロボットハンドにおける落下防止動作を簡易的に示した図である。
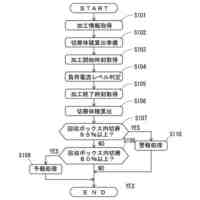
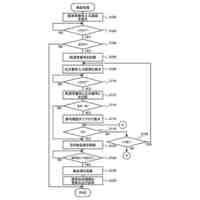
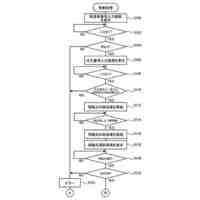
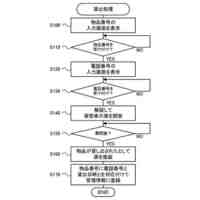
ワーク落下防止プログラムによる処理工程を示したフローチャート図である。
【発明を実施するための形態】
【0009】
本発明に係る工作機械のワーク自動搬送機について、その一実施形態を以下に図面を参照しながら説明する。図1は、工作機械におけるワーク自動搬送機の一実施形態を示した斜視図であり、図2は、そのワーク自動搬送機を示した側面図である。また、図3は、ワーク自動搬送機を含む工作機械全体を制御する制御システムを示したブロック図である。先ず、工作機械について具体的構成の説明は省略するが、図示するワーク自動搬送機8が組み付けられる工作機械1は、各種加工装置を有することによりNC旋盤とマシニングセンタの両方の機能を持つようにした複合加工機である。
【0010】
工作機械1は、ワークWを把持する一対のワーク主軸装置3,5と、それぞれに複数の工具を有するタレット装置4,6が左右対称に配置された対向2軸旋盤であり、機体中央にはタレット工具では困難な加工を行う工具主軸装置2が設けられている。そして、その工具主軸装置2には、加工に応じた工具の自動交換を行うための自動工具交換装置7が設けられている。さらに工作機械1には、左右のワーク主軸装置にそれぞれワークWを自動搬送するためのワーク自動搬送機8が設けられている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
1か月前
株式会社FUJI
ストッカ
1か月前
株式会社FUJI
部品実装装置
1日前
株式会社FUJI
ストッカシステム
22日前
株式会社FUJI
ストッカシステム
22日前
株式会社FUJI
テープ剥離判定装置
10日前
株式会社FUJI
部品実装機及び部品実装方法
10日前
株式会社FUJI
貸出ロッカーおよびロッカーシステム
22日前
株式会社FUJI
対基板作業機及びそのメンテナンス方法
10日前
株式会社FUJI
制御装置、ストッカシステム及び情報処理方法
1日前
株式会社FUJI
荷物管理方法およびストッカ用札並びにストッカシステム
15日前
日東精工株式会社
搬送装置
29日前
株式会社ツノダ
挟持工具
1か月前
株式会社右川ゴム製造所
把持装置
1か月前
CKD株式会社
電動把持装置
8日前
東京都公立大学法人
ロボットハンド
3日前
個人
スロープバリビス-ビス&-ドライバー
1日前
株式会社ダイヘン
画像生成装置
1か月前
株式会社ダイヘン
画像生成装置
1か月前
株式会社ダイヘン
情報処理装置
1か月前
株式会社共和製作所
ロボット用アーム
16日前
西部電機株式会社
吸着装置
1か月前
西部電機株式会社
吸着装置
1か月前
オークマ株式会社
ロボット用架台
1日前
個人
力制限減震装置
1か月前
株式会社マキタ
電動工具
1か月前
トヨタ自動車株式会社
ティーチングシステム
1か月前
トヨタ自動車東日本株式会社
吸着治具
24日前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
ロボット制御システム
22日前
川崎重工業株式会社
ロボットシステム
8日前
工機ホールディングス株式会社
作業機
3日前
トヨタ自動車東日本株式会社
吸着治具
24日前
株式会社不二越
ロボット制御システム
1か月前
工機ホールディングス株式会社
作業機
1か月前
THK株式会社
ロボットシステム
1か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ