TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024060714
公報種別
公開特許公報(A)
公開日
2024-05-07
出願番号
2022168161
出願日
2022-10-20
発明の名称
ロボットハンド
出願人
東京都公立大学法人
代理人
個人
主分類
B25J
15/08 20060101AFI20240425BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】両側から挟んで把持する構成に比べて、外表面が曲面を有する対象物でも確実に把持可能なロボットハンドを提供すること。
【解決手段】第1の非回転把持部(148)を有する第1の把持部材(141)と、第1の非回転把持部(148)との間で対象物(11)を回転不能な状態で把持可能な第2の非回転把持部(168)と対象物(11)に接触可能な箇所が第2の非回転把持部(168)とは異なり第1の非回転把持部(148)との間で対象物(11)を把持可能な第3の把持部(171)とを有する第2の把持部材(161)と、を備えたロボットハンド(100)。
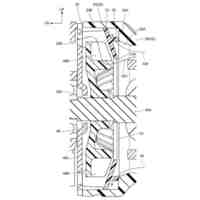
【選択図】図3
特許請求の範囲
【請求項1】
対象物に接触可能な第1の非回転把持部、を有する第1の把持部材と、
前記第1の非回転把持部に対応して配置されて前記第1の非回転把持部との間で挟んだ場合に前記対象物が回転不能な状態で把持可能な第2の非回転把持部と、前記対象物に接触可能な箇所の数が前記第2の非回転把持部とは異なり、前記第1の非回転把持部との間で対象物を把持可能な第3の把持部と、を有する第2の把持部材と、
前記第1の把持部材を支持する第1の支持部材と、
前記第2の把持部材を支持する第2の支持部材と、
前記第1の支持部材と前記第2の支持部材の少なくとも一方を、前記第1の把持部材と前記第2の把持部材とが相対的に接近、離間する方向に移動させる移動機構と、
を備えたことを特徴とするロボットハンド。
続きを表示(約 1,100 文字)
【請求項2】
前記第1の非回転把持部と、前記第1の非回転把持部に対して傾斜した位置に配置され且つ前記対象物に対して接触可能な第1の引掛け把持部と、を有する前記第1の把持部材と、
前記第2の非回転把持部と、前記第3の把持部と、前記第1の引掛け把持部と対応して配置されて前記第1の引掛け把持部との間で挟んだ場合に前記対象物を引掛けた状態で把持可能な第2の引掛け把持部と、を有する前記第2の把持部材と、
を備えたことを特徴とする請求項1に記載のロボットハンド。
【請求項3】
前記第1の非回転把持部と、前記第1の引掛け把持部と、前記第1の非回転把持部および前記第1の引掛け把持部に対して傾斜した位置に配置され且つ対象物に対して接触可能な第1の回転把持部と、を有する前記第1の把持部材と、
前記第2の非回転把持部と、前記第3の把持部と、前記第2の引掛け把持部と、前記第1の回転把持部に対応して配置されて前記第1の回転把持部との間で挟んだ場合に前記対象物が回転可能な状態で把持可能な第2の回転把持部と、を有する前記第2の把持部材と、
を備えたことを特徴とする請求項2に記載のロボットハンド。
【請求項4】
前記第1の回転把持部が対象物に対向する第1の回転把持位置と、前記第1の非回転把持部が対象物に対向する第1の非回転把持位置と、前記第1の引掛け把持部が対象物に対向する第1の引掛け把持位置と、の間で、第1の回転中心を中心として回転移動可能な前記第1の把持部材と、
前記第2の回転把持部が対象物に対向する第2の回転把持位置と、前記第2の非回転把持部が対象物に対向する第2の非回転把持位置と、前記第2の引掛け把持部が対象物に対向する第2の引掛け把持位置と、前記第3の把持部が対象物に対向する第3の把持位置との間で、第2の回転中心を中心として回転移動可能な前記第2の把持部材と、
を備えたことを特徴とする請求項3に記載のロボットハンド。
【請求項5】
前記第1の非回転把持部と、前記第1の非回転把持部に対して傾斜した位置に配置され且つ前記対象物に対して接触可能な第1の回転把持部と、を有する前記第1の把持部材と、
前記第2の非回転把持部と、前記第3の把持部と、前記第1の回転把持部に対応して配置されて前記第1の回転把持部との間で挟んだ場合に前記対象物が回転可能な状態で把持可能な第2の回転把持部と、を有する前記第2の把持部材と、
を備えたことを特徴とする請求項1に記載のロボットハンド。
発明の詳細な説明
【技術分野】
【0001】
本発明は、物品を把持したり持ち上げたり運搬したりする際に使用されるロボットハンドに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
コンビニエンスストアやスーパーマーケット等の商品陳列棚に陳列される物品や、工場で生産された製品等の対象物を把持して移動させるロボットハンドやマニピュレータなどと呼ばれる対象物把持装置に関し、下記の特許文献1に記載の技術が公知である。
【0003】
特許文献1(特開2021-94642号公報)には、一対の回転把持面(107)と一対の固定把持面(108)とが並んで配置されたロボットハンド(100)において、回転が必要な対象物(141)か回転が不要な対象物(142)かに応じて、回転把持面(107)または固定把持面(108)で選択的に対象物(141,142)を把持する技術が記載されている。
特許文献1には、対象物(141,142)を回転把持面(107)で把持した後に、対象物(141,142)の姿勢をカメラ(121)でモニタリングして、目標の姿勢になると回転把持面(107)から固定把持面(108)に切り替えることも記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2021-94642号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
(従来技術の問題点)
特許文献1に記載の技術では、一対の把持面(107,108)で対象物を両側から挟んで把持している。特許文献1のように、2カ所で挟んで把持する構成では、対象物の外形形状が、円筒状や円錐状、球状といった滑らかな曲面を有する場合、把持面が外表面で滑りやすく、対象物が確実に把持できず、運搬中に対象物が落下、脱落する恐れがある。
【0006】
本発明は、両側から挟んで把持する構成に比べて、外表面が曲面を有する対象物でも確実に把持可能なロボットハンドを提供することを技術的課題とする。
【課題を解決するための手段】
【0007】
前記技術的課題を解決するために、請求項1に記載の発明のロボットハンドは、
対象物に接触可能な第1の非回転把持部、を有する第1の把持部材と、
前記第1の非回転把持部に対応して配置されて前記第1の非回転把持部との間で挟んだ場合に前記対象物が回転不能な状態で把持可能な第2の非回転把持部と、前記対象物に接触可能な箇所の数が前記第2の非回転把持部とは異なり、前記第1の非回転把持部との間で対象物を把持可能な第3の把持部と、を有する第2の把持部材と、
前記第1の把持部材を支持する第1の支持部材と、
前記第2の把持部材を支持する第2の支持部材と、
前記第1の支持部材と前記第2の支持部材の少なくとも一方を、前記第1の把持部材と前記第2の把持部材とが相対的に接近、離間する方向に移動させる移動機構と、
を備えたことを特徴とする。
【0008】
請求項2に記載の発明は、請求項1に記載のロボットハンドにおいて、
前記第1の非回転把持部と、前記第1の非回転把持部に対して傾斜した位置に配置され且つ前記対象物に対して接触可能な第1の引掛け把持部と、を有する前記第1の把持部材と、
前記第2の非回転把持部と、前記第3の把持部と、前記第1の引掛け把持部と対応して配置されて前記第1の引掛け把持部との間で挟んだ場合に前記対象物を引掛けた状態で把持可能な第2の引掛け把持部と、を有する前記第2の把持部材と、
を備えたことを特徴とする。
【0009】
請求項3に記載の発明は、請求項2に記載のロボットハンドにおいて、
前記第1の非回転把持部と、前記第1の引掛け把持部と、前記第1の非回転把持部および前記第1の引掛け把持部に対して傾斜した位置に配置され且つ対象物に対して接触可能な第1の回転把持部と、を有する前記第1の把持部材と、
前記第2の非回転把持部と、前記第3の把持部と、前記第2の引掛け把持部と、前記第1の回転把持部に対応して配置されて前記第1の回転把持部との間で挟んだ場合に前記対象物が回転可能な状態で把持可能な第2の回転把持部と、を有する前記第2の把持部材と、
を備えたことを特徴とする。
【0010】
請求項4に記載の発明は、請求項3に記載のロボットハンドにおいて、
前記第1の回転把持部が対象物に対向する第1の回転把持位置と、前記第1の非回転把持部が対象物に対向する第1の非回転把持位置と、前記第1の引掛け把持部が対象物に対向する第1の引掛け把持位置と、の間で、第1の回転中心を中心として回転移動可能な前記第1の把持部材と、
前記第2の回転把持部が対象物に対向する第2の回転把持位置と、前記第2の非回転把持部が対象物に対向する第2の非回転把持位置と、前記第2の引掛け把持部が対象物に対向する第2の引掛け把持位置と、前記第3の把持部が対象物に対向する第3の把持位置との間で、第2の回転中心を中心として回転移動可能な前記第2の把持部材と、
を備えたことを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
6か月前
個人
ねじ締め装置
5か月前
日東精工株式会社
搬送装置
1か月前
中国電力株式会社
腰袋
7日前
株式会社ツノダ
挟持工具
2か月前
UTM株式会社
搬送装置
6か月前
株式会社ツノダ
挟持工具
3か月前
川崎重工業株式会社
ハンド
3か月前
株式会社右川ゴム製造所
把持装置
1か月前
個人
ロボットシステム
5か月前
学校法人立命館
グリッパ
2か月前
トヨタ自動車株式会社
関節機構
6か月前
株式会社不二越
ロボット
5か月前
トヨタ自動車株式会社
関節機構
5か月前
学校法人立命館
ロボットハンド
2か月前
株式会社マキタ
動力工具
2日前
株式会社ダイヘン
搬送装置
6日前
株式会社ダイヘン
搬送装置
6日前
個人
作業台
6か月前
個人
プーリーキー抜き治具
2か月前
CKD株式会社
電動把持装置
27日前
東京都公立大学法人
ロボットハンド
22日前
宮川工機株式会社
板状部品移動装置
12日前
株式会社不二越
予測システム
3か月前
国立大学法人山形大学
二重関節機構
2日前
工機ホールディングス株式会社
作業機
5か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
3か月前
個人
スロープバリビス-ビス&-ドライバー
20日前
株式会社越智工業所
ブレーカ用カバー
5か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
15日前
国立大学法人東北大学
剛性可変連結体
6か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
5か月前
工機ホールディングス株式会社
作業機
3か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ