TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024071978
公報種別
公開特許公報(A)
公開日
2024-05-27
出願番号
2022182531
出願日
2022-11-15
発明の名称
二重関節機構
出願人
国立大学法人山形大学
代理人
個人
主分類
B25J
17/00 20060101AFI20240520BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】複数のモータを根本側に固定しながら、小型かつ手先側の可動範囲を大きくすることができる多自由度の関節機構を提供すること。
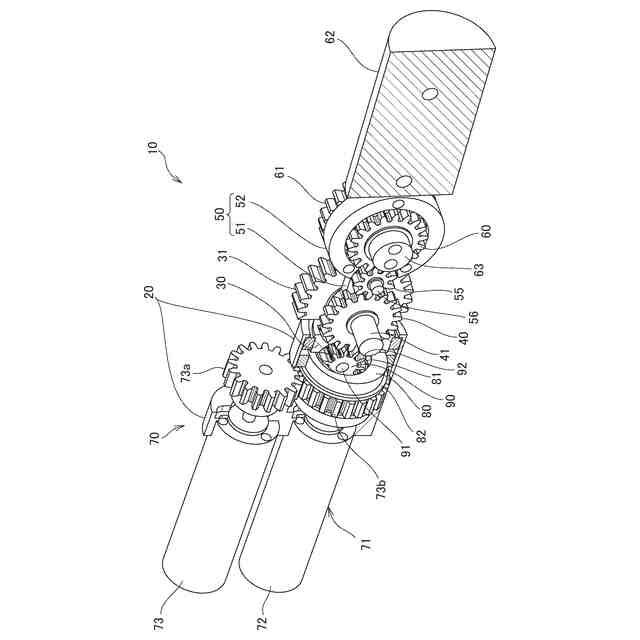
【解決手段】二重関節機構10は、本体フレーム20に回転可能に設けられた回転内軸30と、固定歯車31と、駆動ピニオンギア90と、太陽歯車40と、遊星キャリア50と、中間遊星ピニオン55と、第1遊星歯車60と、第2遊星歯車62と、可動フレーム62と、を備えている。回転内軸30及び駆動ピニオンギア90の2つの回転入力に対して、可動フレーム62が回転内軸30と同軸のロール軸回転及び遊星キャリア50を介して二重のピッチ軸回転の2つの回転出力を行う。
【選択図】図1
特許請求の範囲
【請求項1】
本体フレームに設けられ中空部分を有する回転内軸と、前記回転内軸の端部にこの回転内軸の軸直交方向に一体的設けられた固定歯車と、前記回転内軸の中空部分にこの回転内軸の軸直交方向に回転可能に設けられ駆動力を伝達する駆動ピニオンギアと、前記固定歯車に同軸で回転可能に設けられ前記駆動ピニオンギアに噛み合う太陽歯車と、前記太陽歯車の軸に一端部が回転可能に設けられた遊星キャリアと、前記遊星キャリアの長手方向途中に回転可能に設けられ前記太陽歯車に噛み合う中間遊星ピニオンと、前記遊星キャリアの他端部に回転可能に設けられ前記中間遊星ピニオンに噛み合う第1遊星歯車と、前記第1遊星歯車に同軸で一体的に設けられ前記固定歯車に噛み合う第2遊星歯車と、前記第2遊星歯車に一体的に設けられた可動フレームと、を備え、
前記駆動ピニオンギアの回転入力に対して、前記可動フレームが前記遊星キャリアを介して二重のピッチ軸回転の回転出力を行うことを特徴とする二重関節機構。
続きを表示(約 940 文字)
【請求項2】
請求項1記載の二重関節機構であって、
前記第1遊星歯車及び前記第2遊星歯車は、前記遊星キャリアにベアリングを介して回転可能に設けられていることを特徴とする二重関節機構。
【請求項3】
請求項1又は請求項2記載の二重関節機構であって、
前記遊星キャリアは、一端側の柄部と他端側の円環部とからなる虫メガネ形状に形成され、前記円環部の内側に前記第1遊星歯車が配置されていることを特徴とする二重関節機構。
【請求項4】
請求項1又は請求項2記載の二重関節機構であって、
前記太陽歯車の歯数は、前記第1遊星歯車の歯数と同じであることを特徴とする二重関節機構。
【請求項5】
請求項1又は請求項2記載の二重関節機構であって、
前記回転内軸は前記本体フレームに回転可能に設けられ、
前記回転内軸及び前記駆動ピニオンギアの2つの回転入力に対して、前記可動フレームが前記回転内軸と同軸のロール軸回転及び前記遊星キャリアを介して二重のピッチ軸回転の2つの回転出力を行うことを特徴とする二重関節機構。
【請求項6】
請求項5記載の二重関節機構であって、
前記駆動ピニオンギアをロール軸回転及びピッチ軸回転の2つの回転入力を行う差動機構を備え、
前記差動機構は、前記本体フレームと、前記回転内軸と、円筒状に形成されて前記回転内軸の外周を覆い且つ前記回転内軸の同軸上に回転可能に設けられ前記円筒状の内側にらせん状に歯が形成された内ウォームギアと、前記回転内軸にこの回転内軸の軸直交方向に回転可能に設けられ前記内ウォームギアに噛み合う前記駆動ピニオンギアと、を備え、
前記回転内軸及び前記内ウォームギアの2つの回転入力に対して、前記駆動ピニオンギアが前記回転内軸と同軸のロール軸回転及びピッチ軸回転の2つの回転出力を行うことを特徴とする二重関節機構。
【請求項7】
請求項6記載の二重関節機構であって、
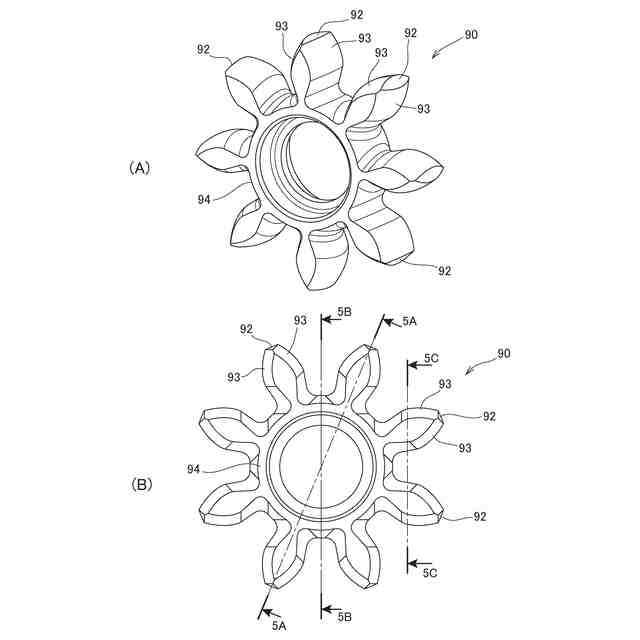
前記駆動ピニオンギアは、その歯面が、円筒歯面、または球面状のクラウニング歯面を有した平歯車であることを特徴とする二重関節機構。
発明の詳細な説明
【技術分野】
【0001】
本発明は、差動機構と遊星歯車機構により駆動力を伝達して回動させる関節機構に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
ロボットアームに代表されるような多関節リンクは、一般に手先アクチュエータの荷重や慣性負荷を根本側のアクチュエータが負担する構造になる。
【0003】
例えば、ロボットの関節機構では、根本側アームに対して手先側アームを、歯車機構を用いてアクチュエータ(以下、モータという)の駆動力を伝達して回動させる。このような歯車機構を用いた関節機構として、特許文献1の関節機構が知られている。
【0004】
特許文献1の関節機構は、根本側アームの端部と手先側アームの端部とが互いに可動自在に連結されている。そして、平歯車である第1歯車及び第2歯車の2つ直径(中心)を共有するように交差させ一体化した交差歯車と、根本側アームに回転可能に設けられ第1歯車と噛み合う根元側第3歯車と、手先側アームに回転可能に設けられ第2歯車と噛み合う手先側第4歯車を備える。交差歯車は、関節部に配置される。根本側アームに設けたモータによる駆動力を介して第3歯車を回転すると、根元側アームに対して手先側アームが可動する。手先側アームに設けたモータによる駆動力を介して第4歯車を回転すると、手先側アームに対して根本側アームが可動する。
【0005】
しかし、特許文献1の関節機構は、根本側アームにモータが設けられているだけでなく、手先側アームにもモータが設けられており、手先側モータの荷重や慣性負荷を根本側のモータが負担する構造になる。これは、根本側モータの高容量化を招き、経済的でない。そのため、複数のモータを根本側に固定しながら、手先側へ多自由度を出力できる関節機構が求められる。また、特許文献1の関節機構は、円筒状の根本側アーム内にモータが設けられると共に円筒状の手先側アーム内にモータが設けられており、根本側アームに対して手先側アームをある程度回動させると、根本側アームの端部が手先側アームの端部に接触するため、手先側アームの回転角度が制限されてしまう。そのため、根本側アームに対して手先側アームの回転角度を大きくすることができる多自由度の関節機構が求められる。
【0006】
ところで、発明者らは、1段で直交2自由度への回転動作が可能な歯車差動機構であるいわゆる内ウォーム差動機構を採用した関節機構を研究しており、円筒の内面にウォームギアが形成された内ウォームギアと、その円筒の内側に配置されるウォームピニオンとを用いた内ウォーム差動機構を採用したものである。これは傘歯車など他の差動装置と比較して小型に製作することができる。しかし、出力歯車が内ウォーム差動機構に埋まるように配置されるため、手先側の回転角度が制限されてしまう。
【0007】
また、広可動域関節の実現のため、オフセット関節や水平多関節方式のロボットアームがあるが、非オフセット方向での可動域減少、関節高さの増加といった課題がある。そのため、二重関節を用いて広可動域関節を実現することが考えられる。周知技術では、ワイヤ駆動によるものや、空気圧駆動によるものがあるが、大きな駆動力を伝達するには好ましくない。また、モータ駆動の二重関節を、クローラロボットのジョイントとして利用した技術もあるが、関節の両方向にアクチュエータを配置する必要があり、やはり根本側モータの高容量化を招き、好ましくない。
【先行技術文献】
【特許文献】
【0008】
特開2009-113195号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明は、以上の点に鑑み、複数のモータを根本側に固定しながら、小型かつ手先側の可動範囲を大きくすることができる多自由度の関節機構を提供することを課題とする。
【課題を解決するための手段】
【0010】
[1]本体フレームに設けられ中空部分を有する回転内軸と、前記回転内軸の端部にこの回転内軸の軸直交方向に一体的設けられた固定歯車と、前記回転内軸の中空部分にこの回転内軸の軸直交方向に回転可能に設けられ駆動力を伝達する駆動ピニオンギアと、前記固定歯車に同軸で回転可能に設けられ前記駆動ピニオンギアに噛み合う太陽歯車と、前記太陽歯車の軸に一端部が回転可能に設けられた遊星キャリアと、前記遊星キャリアの長手方向途中に回転可能に設けられ前記太陽歯車に噛み合う中間遊星ピニオンと、前記遊星キャリアの他端部に回転可能に設けられ前記中間遊星ピニオンに噛み合う第1遊星歯車と、前記第1遊星歯車に同軸で一体的に設けられ前記固定歯車に噛み合う第2遊星歯車と、前記第2遊星歯車に一体的に設けられた可動フレームと、を備え、
前記駆動ピニオンギアの回転入力に対して、前記可動フレームが前記遊星キャリアを介して二重のピッチ軸回転の回転出力を行うことを特徴とする。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
日本軽金属株式会社
クッション
4か月前
国立大学法人山形大学
三次元オブジェクト生成システム
1か月前
株式会社レゾナック
導電粒子の分散方法
2か月前
アズビル金門株式会社
変化検出装置及び変化検出方法
4か月前
積水化学工業株式会社
被覆粒子及び被覆粒子の製造方法
5か月前
国立大学法人山形大学
心不全解析システム、心不全判定装置、心不全判定方法および心不全判定プログラム
4か月前
第一工業製薬株式会社
バイオセンサ電極用皮膜、バイオセンサ電極及び汗成分センサ用電極
3か月前
国立研究開発法人産業技術総合研究所
太陽電池セルおよびその製造方法、ならびに太陽電池モジュール
4日前
国立大学法人山形大学
回転容積型の一軸偏心ポンプを用いた解析システム、方法、及びコンピュータプログラム、並びに、解析システムに用いる解析装置
3か月前
個人
腰袋
4日前
株式会社エビス
連結具
2か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
電動工具
2か月前
株式会社マキタ
打撃工具
3か月前
株式会社マキタ
打撃工具
2か月前
株式会社マキタ
電動工具
12日前
株式会社マキタ
電動ハンマ
3か月前
株式会社ダイヘン
制御装置
3か月前
株式会社ダイヘン
搬送装置
3か月前
株式会社エビス
携帯付属物取付具
3か月前
川崎重工業株式会社
ロボットアーム
12日前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
ハンマドリル
2か月前
日本車輌製造株式会社
締め付け工具
12日前
川崎重工業株式会社
ロボットアーム
12日前
川崎重工業株式会社
ロボット
3か月前
SMC株式会社
グリッパ
4か月前
川崎重工業株式会社
ロボットリスト
12日前
川崎重工業株式会社
ロボットシステム
12日前
学校法人立命館
ロボットハンド
3か月前
株式会社近藤製作所
産業用ロボットチャック
3か月前
CKD株式会社
吸着型搬送装置
26日前
ジヤトコ株式会社
圧入装置
25日前
川崎重工業株式会社
塗装ロボット
1か月前
長堀工業株式会社
締結装置
1か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ