TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024160593
公報種別
公開特許公報(A)
公開日
2024-11-14
出願番号
2023075762
出願日
2023-05-01
発明の名称
回転容積型の一軸偏心ポンプを用いた解析システム、方法、及びコンピュータプログラム、並びに、解析システムに用いる解析装置
出願人
国立大学法人山形大学
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
G01N
19/00 20060101AFI20241107BHJP(測定;試験)
要約
【課題】物体の移送時にポンプから得られる情報を利用して、物体の特性を解析するシステム、方法、及びコンピュータプログラム等を提供する。
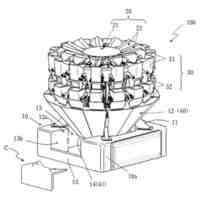
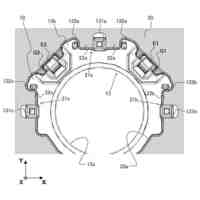
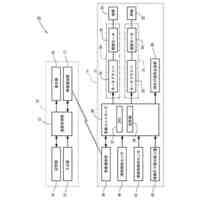
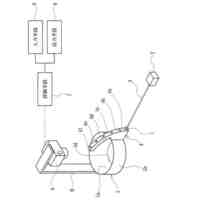
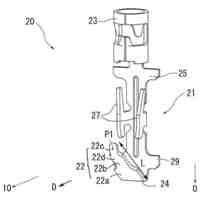
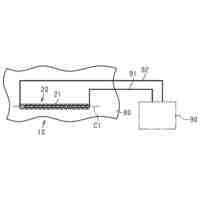
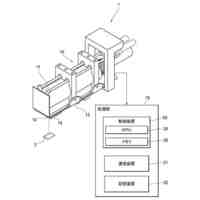
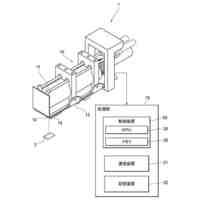
【解決手段】雌ねじ型の挿通孔を有するステータと、挿通孔に挿通された状態で偏心回転を行う雄ねじ型のロータと、を有する回転容積型の一軸偏心ポンプと、一軸偏心ポンプによる物体の移送時にステータに生じる挙動を感知するセンサと、センサを通じて得られたセンサ情報を利用して物体の特性を解析する解析装置と、を備える。
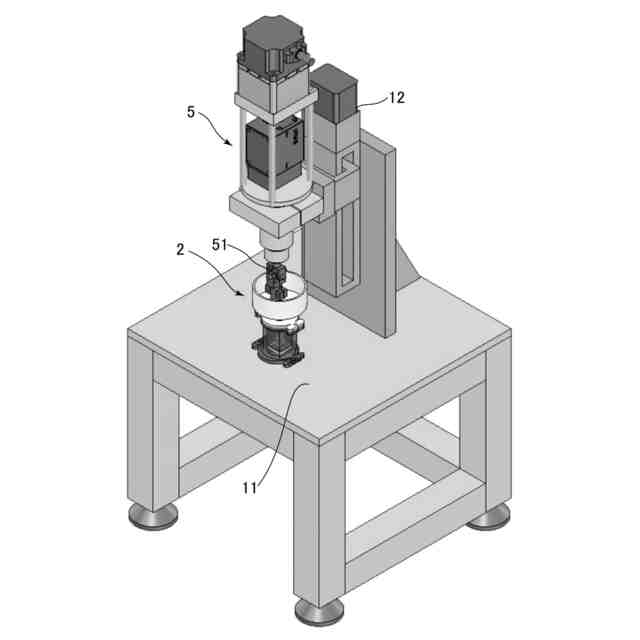
【選択図】図2
特許請求の範囲
【請求項1】
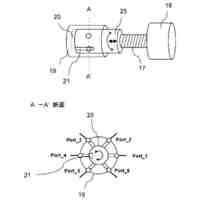
雌ねじ型の挿通孔を有するステータと、
前記挿通孔に挿通された状態で偏心回転を行う雄ねじ型のロータと、を有する回転容積型の一軸偏心ポンプと、
前記一軸偏心ポンプによる物体の移送時に前記ステータに生じる挙動を感知するセンサと、
前記センサを通じて得られたセンサ情報を利用して前記物体の特性を解析する解析装置と、
を備えることを特徴とするシステム。
続きを表示(約 1,100 文字)
【請求項2】
前記物体の粘度が67~6641mPa・sの場合、前記ステータのヤング率を90~177kPaに設定し、前記物体の粘度が2.0×10
5
~7.0×10
5
mPa・sの場合、前記ステータのヤング率を83~817kPaに設定した、請求項1に記載のシステム。
【請求項3】
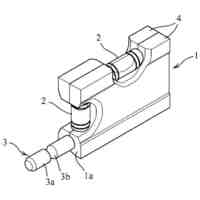
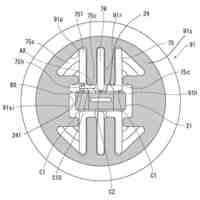
前記センサは、前記ステータに生じる振動を感知する、請求項1に記載のシステム。
【請求項4】
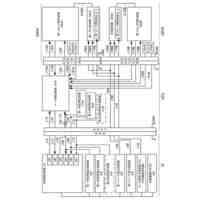
前記解析装置は、
前記センサを通じて得られた振動波形をデジタル変換するデジタル変換部と、
前記デジタル変換器でデジタル変換された振動波形をフーリエ変換するフーリエ変換部と、
前記フーリエ変換部でフーリエ変換することにより得られた振幅スペクトルの複数個のピークの中のn%に相当する個数分の振幅スペクトルを、より小さなピークを示す振幅スペクトルを優先しつつ除去するノイズ処理部と、
前記ノイズ処理部でノイズを除去した振幅スペクトルを逆フーリエ変換することで前記振動波形を復元する逆フーリエ変換部と、
を備える請求項3に記載のシステム。
【請求項5】
前記センサは、圧電素子である、請求項3に記載のシステム。
【請求項6】
前記圧電素子は、前記ステータの外表面に設置される、請求項5に記載のシステム。
【請求項7】
前記解析装置は、解析された前記物体の特性に応じて前記一軸偏心ポンプの動作を調整する調整部を更に備える、請求項1に記載のシステム。
【請求項8】
前記解析装置は、
前記センサ情報を取得するセンサ情報取得部と、
前記物体に関する物体情報を取得する物体情報取得部と、
訓練データとしての前記センサ情報及び前記物体情報に基づき、前記センサ情報が入力されたことに応じて前記物体の特性を出力する学習モデルを生成する学習モデル生成部を備える、請求項1に記載のシステム。
【請求項9】
前記学習モデル生成部によって生成された学習モデルを管理サーバへ送信する通信部を備える、請求項8に記載のシステム。
【請求項10】
前記解析装置は、
前記センサ情報を取得するセンサ情報取得部と、
前記物体に関する物体情報を取得する物体情報取得部と、
訓練データとしての前記センサ情報及び前記物体情報に基づいて生成された、前記センサ情報が入力されたことに応じて前記物体の特性を出力する学習モデルを備える、請求項1に記載のシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、回転容積型の一軸偏心ポンプによって移送される物体の特性を解析するシステム、方法、及びコンピュータプログラム等に関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
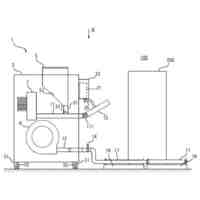
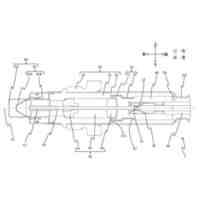
回転容積型の一軸偏心ポンプ(Progressive Cavity Pumps、 PCPs)(以下、単に「ポンプ」と記載した場合は、回転容積型の一軸偏心ポンプを意味するものとする)は、ステータとロータを備え、ステータ内でロータを回転させることによって、一定量の液体、スラリー、粉体等を移送することができる。この型のポンプは、個体粒子を液中に含むスラリー液を代表とする様々な物体を移送することができるため、様々な分野で従来から広く使用されてきた。しかしながら、その使用目的は、本来の目的である物体の移送それ自体であったことから、研究テーマは、主として、ステータのキャビティ形状、物体の移送精度等、ポンプの移送構造それ自体にのみ向けられてきた。
【0003】
本発明は、ポンプの移送構造それ自体ではなく、ポンプによって移送される物体の特性を解析することに向けられたものであって、新たな視点に基づく発明であり、従って、先行技術文献は特に存在しない。尚、以下に記載した非特許文献1、2は、後述する物理リザバーに関する文献、非特許文献3は、特徴量を抽出するために使用されるソフトウェアに関する文献である。
【先行技術文献】
【非特許文献】
【0004】
「リザバーコンピューティング」、田中剛平、中根了昌、廣瀬明(森北出版株式会社、2021年3月)
「ソフトロボット学入門」、新学術領域「ソフトロボット学」研究班監修、日本ロボット学会監修、鈴森 康一等編著(オーム社、2021年1月)
Christ, M., Braun, N., Neuffer, J., & Kempa-Liehr, A. W. (2018). Time series feature extraction on basis of scalable hypothesis tests (tsfresh-a python package). Neurocomputing, 307, 72-77.
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明者等の重要な研究テーマの1つでもある食品加工技術では、3Dフードプリンティングといった新たな食品製造方法の開発が日々進められている。3Dフードプリンティングによれば、形状の自由度が高い様々な食品を容易に製造することができるが、このような方法で製造された食品の品質、再現性等は、その加工材料である食材の特性(ex. 種別、粘度、濃度)に大きく左右される。本発明者等は、特に、ポンプを用いた食材の移送工程に着目しつつ、鋭意研究を重ね、この結果、食材そのものからではなく、食材の移送時にポンプから得られる情報を利用して、食材の特性を解析できることを発見した。この解析結果は、食材そのものは勿論、そのような食材を用いて加工された最終製品である食品の品質維持、再現性向上等に大きく貢献し得るものとなる。したがって、本発明の目的は、物体の移送時にポンプから得られる情報を利用して、物体の特性を解析するシステム、方法、及びコンピュータプログラム等を提供することにある。尚、念のため付言しておくと、流体の状態を計算する従来の一般的な流体の数値解析技術でも、レオロジー特性やダイナミクスを求めることが可能であり、詳細かつ動的に流体状態を可視化できるが、これらのアプローチは、輸送される流体の種類を単にマッピングする目的においては、計算量が多く、複雑な定量評価が必ずしも有効とはいえないのが現状である。したがって、従来の一般的な知識は、本発明の問題を解決するには不十分なものである。
【課題を解決するための手段】
【0006】
上記の課題を解決するため、本発明の一態様によるシステムは、雌ねじ型の挿通孔を有するステータと、前記挿通孔に挿通された状態で偏心回転を行う雄ねじ型のロータと、を有する回転容積型の一軸偏心ポンプと、前記一軸偏心ポンプによる物体の移送時に前記ステータに生じる挙動を感知するセンサと、前記センサを通じて得られたセンサ情報を利用して前記物体の特性を解析する解析装置と、を備えることを特徴として有する。
この態様のシステムによれば、物体の移送時にポンプから得られる情報を利用して、物体の特性を解析することができる。
【0007】
本発明の一態様による方法は、雌ねじ型の挿通孔を有するステータと、前記挿通孔に挿通された状態で偏心回転を行う雄ねじ型のロータと、を有する回転容積型の一軸偏心ポンプに使用される方法であって、前記一軸偏心ポンプによる物体の移送時に前記ステータに生じる挙動をセンサによって感知する段階と、前記センサを通じて得られたセンサ情報を利用して前記物体の特性を解析装置によって解析する段階と、を備えることを特徴として有する。
【0008】
また、本発明の他の態様による方法は、雌ねじ型の挿通孔を有するステータと、前記挿通孔に挿通された状態で前記ステータに対して偏心回転を行う雄ねじ型のロータと、を有する回転容積型の一軸偏心ポンプと、前記一軸偏心ポンプによる物体の移送時に前記ステータに生じる挙動を感知するセンサと、前記センサを通じて得られたセンサ情報を利用して前記物体の特性を解析する解析装置と、を備えるシステムに使用される方法であって、前記センサ情報を取得する段階と、前記物体に関する物体情報を取得する段階と、訓練データとしての前記センサ情報及び前記物体情報に基づき、前記センサ情報が入力されたことに応じて前記物体の特性を出力する学習モデルを生成する段階と、を備えることを特徴として有する。
【0009】
更に、本発明の他の態様による方法は、雌ねじ型の挿通孔を有するステータと、前記挿通孔に挿通された状態で前記ステータに対して偏心回転を行う雄ねじ型のロータと、を有する回転容積型の一軸偏心ポンプと、前記一軸偏心ポンプによる物体の移送時に前記ステータに生じる挙動を感知するセンサと、前記センサを通じて得られたセンサ情報を利用して前記物体の特性を解析する解析装置と、を備えるシステムに使用される方法であって、前記センサ情報を取得する段階と、前記物体に関する物体情報を取得する段階と、訓練データとしての前記センサ情報及び前記物体情報に基づいて生成された学習モデルを用いて、前記センサ情報が入力されたことに応じて前記物体の特性を出力する段階と、を備えることを特徴として有する。
【0010】
本発明の一態様によるコンピュータプログラムは、雌ねじ型の挿通孔を有するステータと、前記挿通孔に挿通された状態で偏心回転を行う雄ねじ型のロータと、を有する回転容積型の一軸偏心ポンプに使用されるコンピュータプログラムであって、コンピュータに、前記一軸偏心ポンプによる物体の移送時に前記ステータに生じる挙動を感知するセンサを通じて得られたセンサ情報を利用して前記物体の特性を解析させる、ことを特徴として有する。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
国立大学法人山形大学
PC合成阻害剤及びそのスクリーニング方法
12日前
個人
粒子分析装置
1か月前
株式会社イシダ
計量装置
25日前
日本精機株式会社
表示装置
11日前
個人
アクセサリー型テスター
1か月前
日本精機株式会社
アセンブリ
17日前
個人
準結晶の解析方法
17日前
株式会社エビス
水準器
10日前
株式会社豊田自動織機
自動走行体
16日前
栄進化学株式会社
浸透探傷用濃縮液
1か月前
株式会社ミツトヨ
画像測定機
1か月前
株式会社不二越
塵埃噴射装置
5日前
日本碍子株式会社
ガスセンサ
10日前
株式会社テイエルブイ
振動検出装置
1か月前
個人
浸透探傷試験方法
6日前
株式会社東芝
センサ
5日前
トヨタ自動車株式会社
検査装置
25日前
トヨタ自動車株式会社
制御装置
6日前
ダイハツ工業株式会社
試料セル
1か月前
GEE株式会社
光学特性測定装置
16日前
トヨタ自動車株式会社
電気自動車
1か月前
日本特殊陶業株式会社
ガスセンサ
17日前
大和製衡株式会社
計量装置
1か月前
日本特殊陶業株式会社
ガスセンサ
4日前
日本特殊陶業株式会社
ガスセンサ
5日前
理研計器株式会社
ガス検出器
1か月前
理研計器株式会社
ガス検出器
1か月前
理研計器株式会社
ガス検出器
1か月前
TDK株式会社
アレイセンサ
6日前
株式会社TISM
センサ部材
16日前
株式会社熊谷組
計測システム
1か月前
株式会社不二越
X線測定装置
11日前
東ソー株式会社
簡易型液体クロマトグラフ
27日前
理研計器株式会社
ガス検出器
1か月前
理研計器株式会社
ガス検出器
1か月前
株式会社不二越
X線測定装置
11日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ