TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2023177809
公報種別
公開特許公報(A)
公開日
2023-12-14
出願番号
2022090683
出願日
2022-06-03
発明の名称
ロボットシステム
出願人
個人
代理人
個人
,
個人
主分類
B25J
19/06 20060101AFI20231207BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作業空間の省スペース化を実現できるロボットシステムを提供する。
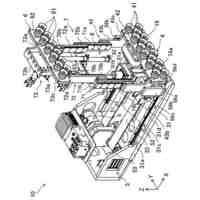
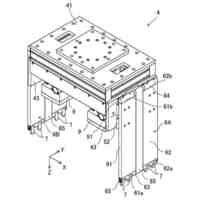
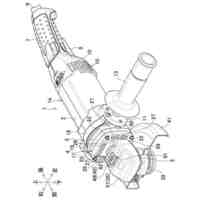
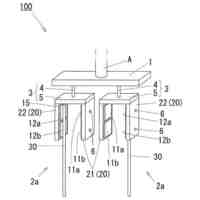
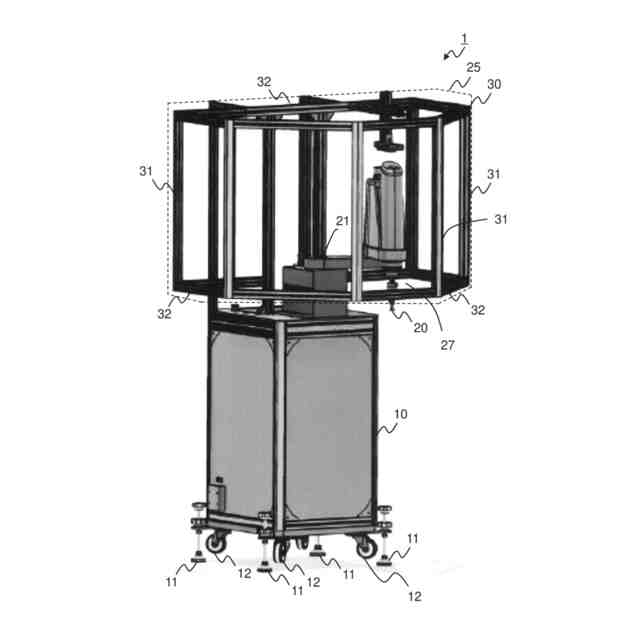
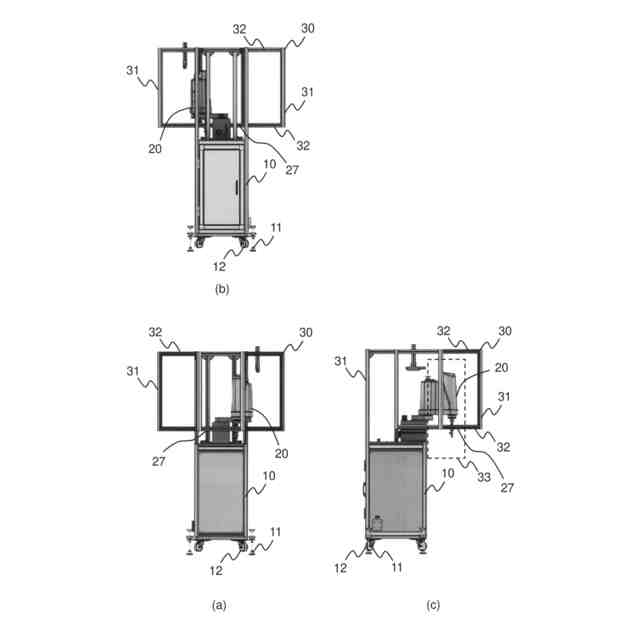
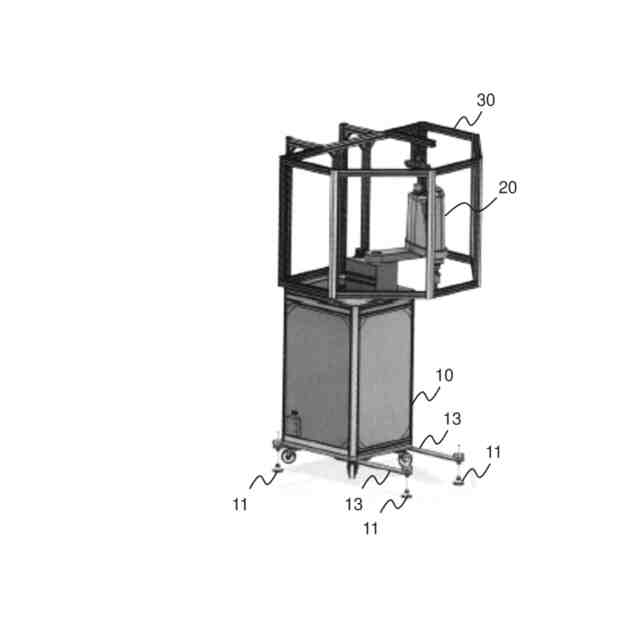
【解決手段】ロボットシステム1は、筐体10と、筐体10の上方空間に配置され、上方空間から水平方向に一部が突出する状態を有する駆動装置20と、駆動装置20が位置する範囲の外側に、その駆動装置20を囲うように設けられた囲いとを備えている。囲い25には、少なくとも駆動装置20が上方空間から突出する部分の鉛直下向きに開口部27が設けられ、駆動装置20は、上方空間から突出する部分の下方向に存在する物体に対して開口部27を介して作用可能に駆動する。
【選択図】図1
特許請求の範囲
【請求項1】
筐体と、
前記筐体の上方空間に配置され、当該上方空間から水平方向に一部が突出する状態を有する駆動装置と、
前記駆動装置が位置する範囲の外側に、当該駆動装置を囲うように設けられた囲いとを備え、
前記囲いには、少なくとも前記駆動装置が前記上方空間から突出する部分の鉛直下向きに開口部が設けられ、
前記駆動装置は、前記上方空間から突出する部分の下方向に存在する物体に対して前記開口部を介して作用可能に駆動する
ことを特徴とするロボットシステム。
続きを表示(約 840 文字)
【請求項2】
駆動装置を囲うように設けられた囲いは、透明板で構成される
請求項1記載のロボットシステム。
【請求項3】
駆動装置を囲うように設けられた囲いは、複数のフレームからなるフレーム構造体を含み、
前記フレーム構造体は、
筐体の上面に対して垂直方向に、当該筐体の上面以上の高さから所定の間隔で前記駆動装置の高さを超える位置まで形成された複数の縦方向フレームと、
隣接する前記縦方向フレームの間を連結するように形成される複数の横方向フレームとを含み、
前記突出する状態を有する駆動装置の外側に設けられる縦方向フレームは、前記横方向フレームと連結して支持されるように形成される
請求項1または請求項2記載のロボットシステム。
【請求項4】
フレーム構造体は、筐体に対して、逆L字に形成されたフレームで連結される
請求項3記載のロボットシステム。
【請求項5】
駆動装置が突出する方向にアジャスタパットの位置を延長するスライドレールが、筐体の下部に設けられる
請求項1または請求項2記載のロボットシステム。
【請求項6】
筐体の上方空間に配置され、当該上方空間から水平方向に一部が突出する状態を有する駆動装置が位置する範囲の外側に、当該駆動装置を囲うように設けられた複数のフレームからなるフレーム構造体であって、
前記筐体の上面に対して垂直方向に、当該筐体の上面以上の高さから所定の間隔で前記駆動装置の高さを超える位置まで形成された複数の縦方向フレームと、
隣接する前記縦方向フレームの間を連結するように形成される複数の横方向フレームとを備え、
前記突出する状態を有する駆動装置の外側に設けられる縦方向フレームは、前記横方向フレームと連結して支持されるように形成される
ことを特徴とするフレーム構造体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業の自動化に用いられるロボットシステムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
大量生産を行う工場では、作業を自動化するために、包装や箱詰めを行うロボットシステムを導入することが一般的であり、ロボットシステムも大型になることが多い。一方、近年では、工場ラインの作業スペースを効率化するため、ロボットシステムについても小型化することが求められている。
【0003】
例えば、特許文献1には、設置スペースの有効利用を図るための積層型ロボットラインが記載されている。特許文献1に記載された積層型ロボットラインでは、ライン構成要素を、各組ライン別にフレーム構造体で一体に支持してユニット化するとともに、各フレーム構造体に、鉛直方向上下の対応位置で相互に着脱自在に連結する連結部を設ける。これにより、互いの連結部を介してフレーム構造体を上下多段に連結して製造ラインを積層可能に構成する。
【先行技術文献】
【特許文献】
【0004】
特開2002-36071号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
産業用ロボットアームは、法令(労働安全衛生規則)により、安全のため、柵または囲いを設ける等の措置が義務づけられている。特許文献1に記載されたライン構成要素には、小型ロボットの周囲にフレーム構造体が設けられている。しかし、特許文献1に記載されたフレーム構造体のような柵を設けた場合、装置全体が大きくなってしまう結果、工場内の多くのスペースを占有してしまうという問題があり、狭小な工場へのロボット導入の障壁となってしまうおそれがある。
【0006】
また、特許文献1に記載されたロボットラインは、積載型に構成される特性上、コンベヤ等を用いた横方向の流れ作業を行うような工場ラインに適用することは難しい。
【0007】
そこで、本発明では、作業空間の省スペース化を実現できるロボットシステムおよびフレーム構造体を提供することを目的とする。
【課題を解決するための手段】
【0008】
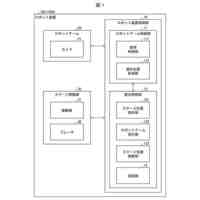
本発明によるロボットシステムは、筐体と、筐体の上方空間に配置され、その上方空間から水平方向に一部が突出する状態を有する駆動装置と、駆動装置が位置する範囲の外側に、その駆動装置を囲うように設けられた囲いとを備え、その囲いには、少なくとも駆動装置が上方空間から突出する部分の鉛直下向きに開口部が設けられ、駆動装置が、上方空間から突出する部分の下方向に存在する物体に対して開口部を介して作用可能に駆動することを特徴とする。
【0009】
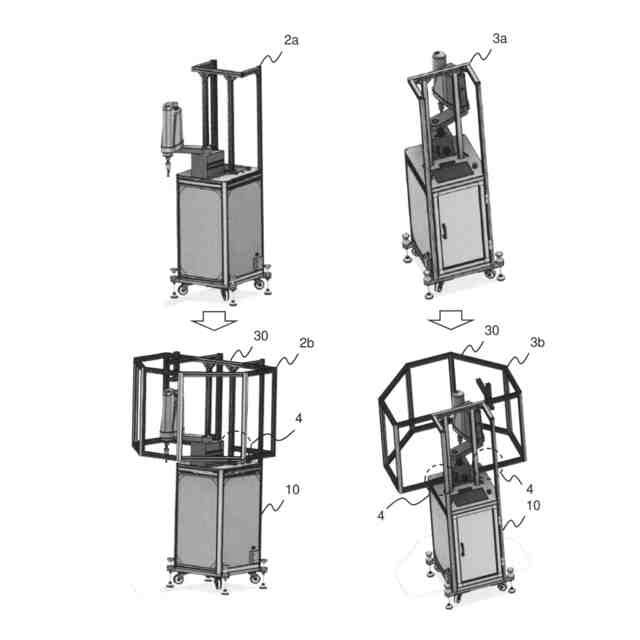
本発明によるフレーム構造体は、筐体の上方空間に配置され、その上方空間から水平方向に一部が突出する状態を有する駆動装置が位置する範囲の外側に、その駆動装置を囲うように設けられた複数のフレームからなるフレーム構造体であって、筐体の上方空間に対して垂直方向に、その筐体の上面以上の高さから所定の間隔で駆動装置の高さを超える位置まで形成された複数の縦方向フレームと、隣接する縦方向フレームの間を連結するように形成される複数の横方向フレームとを備え、突出する状態を有する駆動装置の外側に設けられる縦方向フレームは、横方向フレームと連結して支持されるように形成されることを特徴とする。
【発明の効果】
【0010】
本発明によれば、作業空間の省スペース化を実現できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
5か月前
株式会社フジキン
レンチ
6か月前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
16日前
UTM株式会社
搬送装置
5か月前
株式会社ツノダ
挟持工具
1か月前
株式会社ツノダ
挟持工具
2か月前
個人
ペットボトル用蓋開け具。
5か月前
川崎重工業株式会社
ハンド
2か月前
株式会社右川ゴム製造所
把持装置
25日前
川崎重工業株式会社
ハンド
7か月前
川崎重工業株式会社
ハンド
7か月前
個人
ロボットシステム
4か月前
学校法人立命館
ロボットハンド
1か月前
株式会社マキタ
電動工具
7か月前
オムロン株式会社
ロボット装置
7か月前
トヨタ自動車株式会社
関節機構
4か月前
学校法人立命館
グリッパ
1か月前
トヨタ自動車株式会社
関節機構
4か月前
株式会社不二越
ロボット
6か月前
学校法人立命館
グリッパ
7か月前
株式会社不二越
ロボット
4か月前
オムロン株式会社
搬送システム
7か月前
オムロン株式会社
ロボットハンド
6か月前
川崎重工業株式会社
整列システム
7か月前
学校法人立命館
箸グリッパ
7か月前
個人
作業台
5か月前
個人
プーリーキー抜き治具
1か月前
株式会社不二越
予測システム
2か月前
川崎重工業株式会社
ロボット
6か月前
株式会社近藤製作所
ロータリージョイント
6か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社ダイヘン
画像生成装置
25日前
国立大学法人東北大学
剛性可変連結体
5か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社ダイヘン
情報処理装置
25日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ