TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2023154317
公報種別
公開特許公報(A)
公開日
2023-10-19
出願番号
2022063572
出願日
2022-04-06
発明の名称
ロボット
出願人
株式会社不二越
代理人
個人
,
個人
主分類
B25J
9/06 20060101AFI20231012BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】多関節型可動アームにおける先端のアーム周辺の体積を低減できるロボットを提供する。
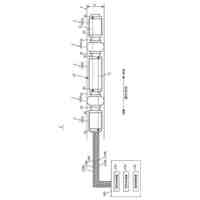
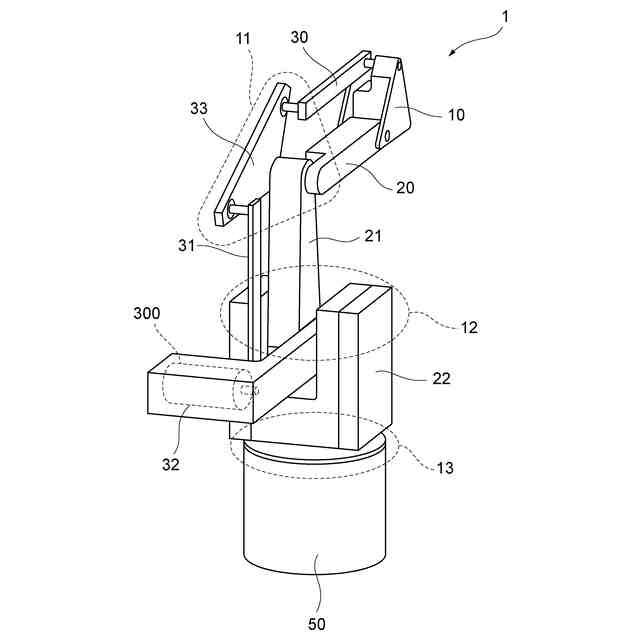
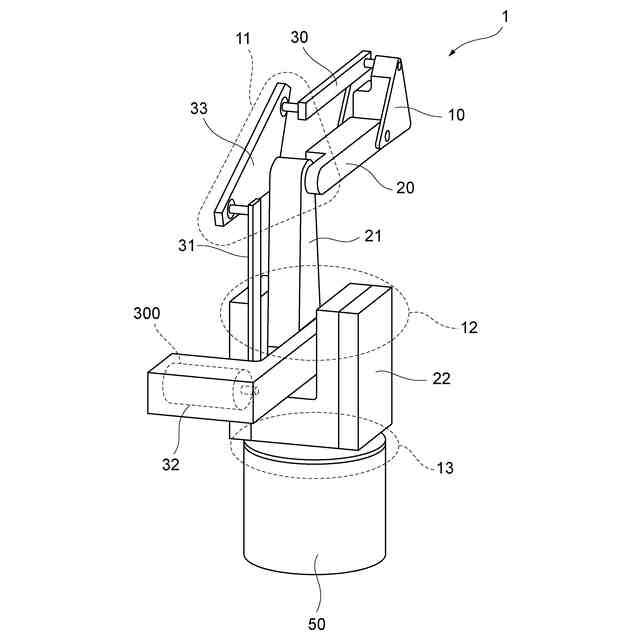
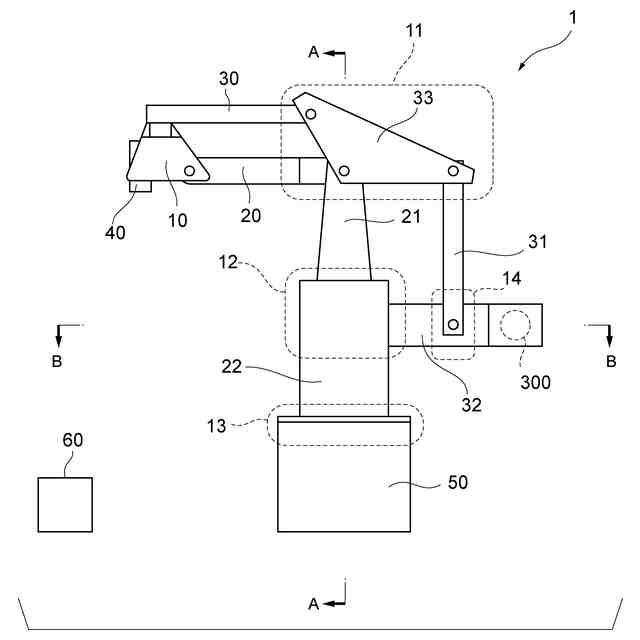
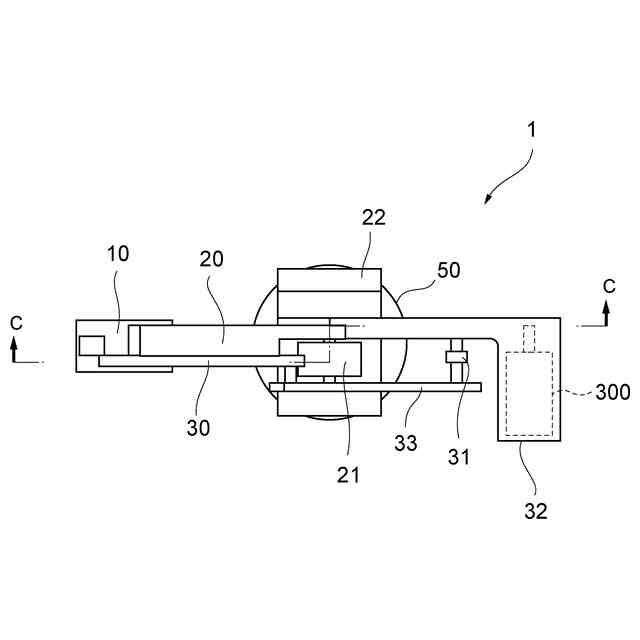
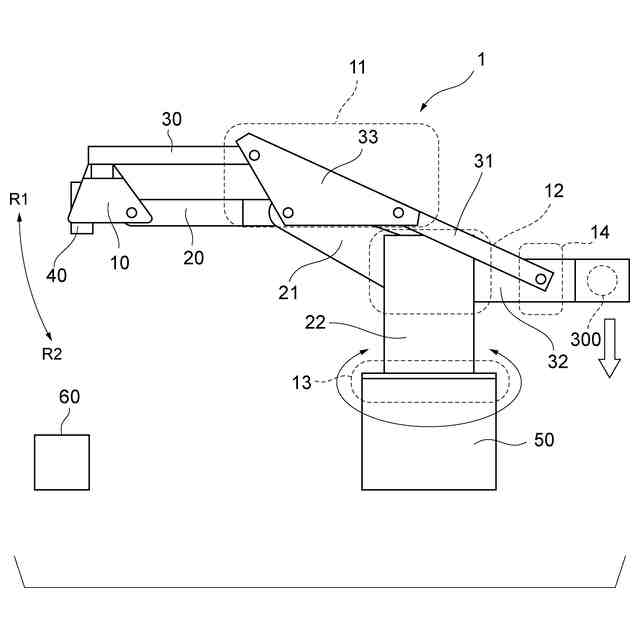
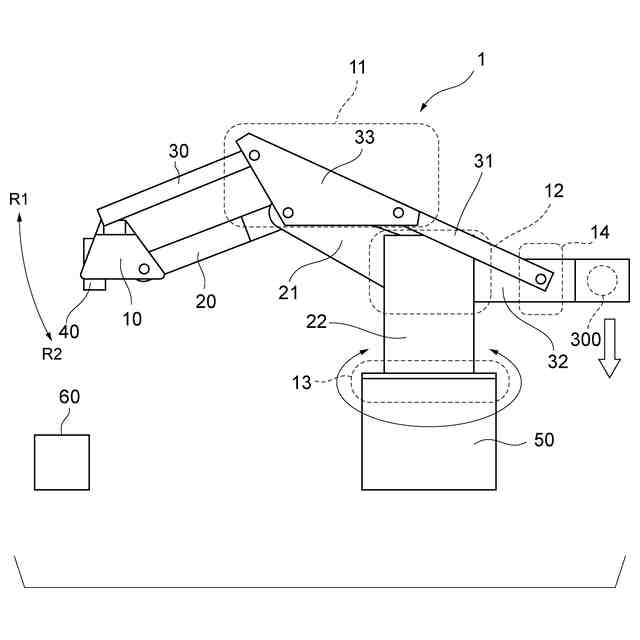
【解決手段】ロボット1は、第1アーム部22及び第2アーム部21を接続する第1関節部12と、第2アーム部21及び第3アーム部20を接続する第2関節部11と、第3アーム部20及びフランジ40を接続する第3関節部10と、一端が第2関節部11に接続され他端が第3関節部10に接続される第1リンク30と、一端が第2関節部11に接続される第2リンク31と、第2リンク31の他端と第1関節部12とに接続されるとともに、第2リンク31の他端を基点に第1関節部12と反対側に第3アーム部20を回動させるモータ300を有するカウンターウェイト32と、モータ300が発生させた回動力を第1関節部12、第2アーム部21及び第2関節部11を介して第3アーム部20に伝達する伝達部材400とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
第1アーム部と、
前記第1アーム部の一端に接続される第1関節部と、
前記第1関節部を介して前記第1アーム部に対して回動するように、一端が前記第1関節部に接続される第2アーム部と、
前記第2アーム部の他端に接続される第2関節部と、
前記第2関節部を介して前記第2アーム部に対して回動するように、一端が前記第2関節部に接続される第3アーム部と、
前記第3アーム部の他端に接続される第3関節部と、
ワークに対して所定の作業を行うとともに、前記第3関節部に接続されたフランジと、
一端が前記第2関節部に接続され、他端が前記第3関節部に接続される第1リンクと、
一端が前記第2関節部に接続される第2リンクと、
前記第2リンクの他端と前記第1関節部とに接続されるとともに、前記第2アーム部に対して前記第3アーム部を回動させるためのモータを、前記第2リンクの前記他端を挟み、前記第1関節部とは反対側に有するカウンターウェイトと、
前記モータが発生させた回動力を前記第1関節部、前記第2アーム部及び前記第2関節部を介して前記第3アーム部に伝達する伝達部材と、
を備えることを特徴とするロボット。
続きを表示(約 620 文字)
【請求項2】
前記第1リンクは、前記第2アーム部に対する前記第3アーム部の回動方向のうちの第1方向側に前記第3アーム部に対して略平行となるように設けられており、
前記第2リンクは、前記第1方向側に前記第2アーム部に対して略平行に設けられていることを特徴とする請求項1に記載のロボット。
【請求項3】
前記伝達部材は、前記カウンターウェイト内に設けられている第1伝達機構と、前記第2アーム部内に設けられている第2伝達機構と、を有し、
前記第1伝達機構は、前記第1関節部を介して、前記モータの回動力を前記第2伝達機構に伝達し、
前記第2伝達機構は、前記第2関節部を介して、前記第1伝達機構から伝達された回動力を前記第3アーム部に伝達することを特徴とする請求項1又は2に記載のロボット。
【請求項4】
前記第1伝達機構は、前記モータが発生させた回動力に従って回動する第1プーリと、前記第1プーリの回動力を伝達する第1ベルトと、前記第1ベルトから伝達された回動力を前記第2伝達機構に伝達する第2プーリと、を有し、
前記第2伝達機構は、前記第2プーリから伝達された回動力に従って回動する第3プーリと、前記第3プーリの回動力を伝達する第2ベルトと、前記第2ベルトから伝達された回動力を前記第3アーム部に伝達する第4プーリと、を有することを特徴とする請求項3に記載のロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットに関し、特に多関節型可動アームと平行リンク機構とを備えるロボットに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
多関節型可動アームの剛性を高めるため、平行リンク機構が設けられている多関節型可動アームを備えるロボットが知られている。平行リンク機構は、多関節型可動アームにおける各アーム部に対して略平行に設けられている複数のリンクと、リンク同士及びアーム部を接続する関節部とによって構成されており、各リンクによって各アーム部を支持している。
【0003】
これに関し、特許文献1には、第1の腕と、第1の腕に回動自在に支持される第2の腕と、第2の腕に回動自在に支持される第3の腕と、第3の腕に回動自在に支持される手首部と、平行四辺形リンク機構とを備えるロボットにおいて、手首部を駆動するための減速機が第1の腕及び第2の腕の軸支部位に設けられており、さらに手首部の動きと反対方向に押圧作用を行うバランス機構が平行リンク機構における第2のリンクの延長部に設けられている構成が開示されている。
【先行技術文献】
【特許文献】
【0004】
特許3813542号
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の技術では、第3の腕に対して第4の腕を回動させるためのモータが第3の腕及び第4の腕の接続箇所に配置されているため、当該モータの重量が第2の腕に対して第3の腕を回動させるためのモータに加わることとなる。これにより、特許文献1に記載の技術では、第4の腕周辺の体積の増大を招く可能性がある。
【0006】
本発明はこのような問題に鑑みてなされたものであり、その目的は、多関節型可動アームにおける先端のアーム周辺の体積を低減できるロボットを提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明のロボットは、第1アーム部と、前記第1アーム部の一端に接続される第1関節部と、前記第1関節部を介して前記第1アーム部に対して回動するように、一端が前記第1関節部に接続される第2アーム部と、前記第2アーム部の他端に接続される第2関節部と、前記第2関節部を介して前記第2アーム部に対して回動するように、一端が前記第2関節部に接続される第3アーム部と、前記第3アーム部の他端に接続される第3関節部と、ワークに対して所定の作業を行うとともに、前記第3関節部に接続されたフランジと、一端が前記第2関節部に接続され、他端が前記第3関節部に接続される第1リンクと、一端が前記第2関節部に接続される第2リンクと、前記第2リンクの他端と前記第1関節部とに接続されるとともに、前記第2アーム部に対して前記第3アーム部を回動させるためのモータを、前記第2リンクの前記他端を挟み、前記第1関節部とは反対側に有するカウンターウェイトと、前記モータが発生させた回動力を前記第1関節部、前記第2アーム部及び前記第2関節部を介して前記第3アーム部に伝達する伝達部材とを備える。
【0008】
また、前記第1リンクは、前記第2アーム部に対する前記第3アーム部の回動方向のうちの第1方向側に前記第3アーム部に対して略平行となるように設けられており、前記第2リンクは、前記第1方向側に前記第2アーム部に対して平行に設けられている。
【0009】
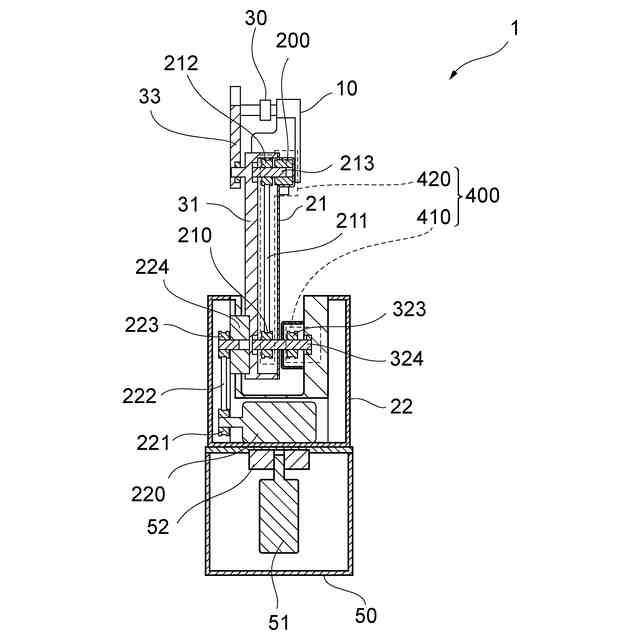
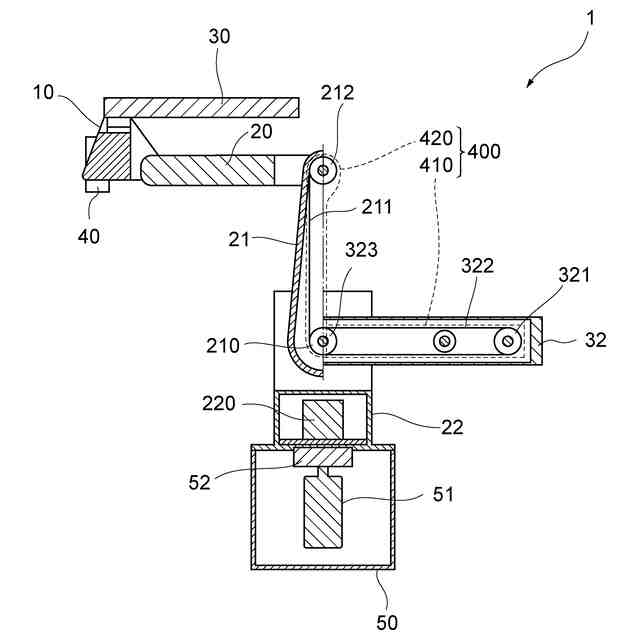
また、前記伝達部材は、前記カウンターウェイト内に設けられている第1伝達機構と、前記第2アーム部内に設けられている第2伝達機構と、を有し、前記第1伝達機構は、前記第1関節部を介して、前記モータの回動力を前記第2伝達機構に伝達し、前記第2伝達機構は、前記第2関節部を介して、前記第1伝達機構から伝達された回動力を前記第3アーム部に伝達する。
【0010】
また、前記第1伝達機構は、前記モータが発生させた回動力に従って回動する第1プーリと、前記第1プーリの回動力を伝達する第1ベルトと、前記第1ベルトから伝達された回動力を前記第2伝達機構に伝達する第2プーリと、を有し、前記第2伝達機構は、前記第2プーリから伝達された回動力に従って回動する第3プーリと、前記第3プーリの回動力を伝達する第2ベルトと、前記第2ベルトから伝達された回動力を前記第3アーム部に伝達する第4プーリとを有する。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
5か月前
株式会社フジキン
レンチ
6か月前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
16日前
個人
ペットボトル用蓋開け具。
5か月前
UTM株式会社
搬送装置
5か月前
株式会社ツノダ
挟持工具
1か月前
株式会社ツノダ
挟持工具
2か月前
川崎重工業株式会社
ハンド
2か月前
株式会社右川ゴム製造所
把持装置
25日前
個人
ロボットシステム
4か月前
学校法人立命館
ロボットハンド
1か月前
トヨタ自動車株式会社
関節機構
4か月前
学校法人立命館
グリッパ
1か月前
株式会社不二越
ロボット
6か月前
トヨタ自動車株式会社
関節機構
4か月前
株式会社不二越
ロボット
4か月前
オムロン株式会社
ロボット装置
7か月前
オムロン株式会社
ロボットハンド
6か月前
個人
プーリーキー抜き治具
1か月前
個人
作業台
5か月前
株式会社近藤製作所
ロータリージョイント
6か月前
株式会社不二越
予測システム
2か月前
川崎重工業株式会社
ロボット
6か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社中村製作所
トルクドライバー
1か月前
小倉クラッチ株式会社
ロボットハンド
4か月前
工機ホールディングス株式会社
作業機
4か月前
学校法人 中央大学
管内移動ロボット
6か月前
株式会社ダイヘン
画像生成装置
25日前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
4か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ