TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024049790
公報種別
公開特許公報(A)
公開日
2024-04-10
出願番号
2022156242
出願日
2022-09-29
発明の名称
吸着装置
出願人
西部電機株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
15/06 20060101AFI20240403BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】物品に過度な負荷がかかるのを抑制して物品の持ち上げが可能な吸着装置を提供する。
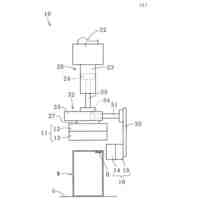
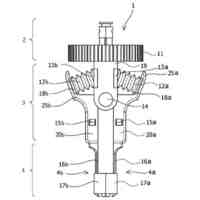
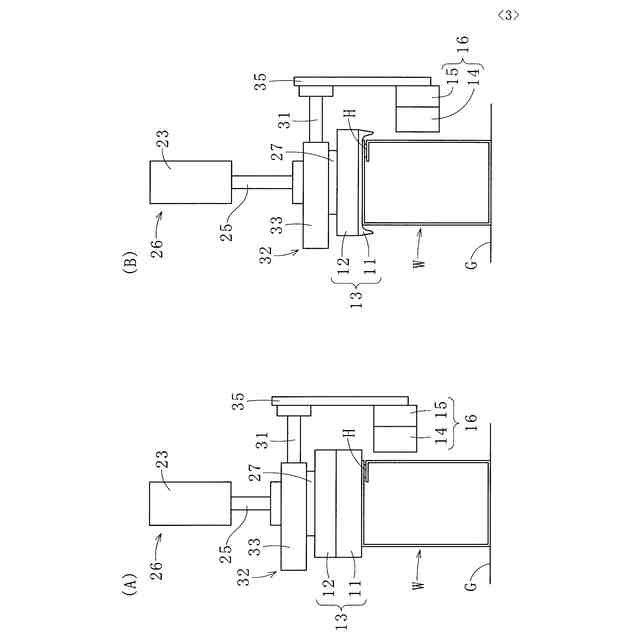
【解決手段】物品Wの上側に接触する上側吸着パッド11及び上側吸着パッド11が取り付けられた上側吸引ユニット12を備えて物品Wの上側を吸着保持する上側支持機構13と、物品Wの側方に接触する側方吸着パッド14及び側方吸着パッド14が取り付けられた側方吸引ユニット15を備えて物品Wの側方を吸着保持する側方支持機構16を有する吸着装置10において、ベース部23に対して上側吸引ユニット12と一体となって昇降する昇降体25と、昇降体25が上側吸引ユニット12と共にベース部23に対して自重で下降する状態にし、物品Wの上方に配された上側吸引ユニット12を昇降体25と共に下降させ、置かれた状態の物品Wの上側を上側支持機構13に吸着保持させた状態にし、側方支持機構16に物品Wの側方を吸着保持させる制御手段とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
物品の上側に接触する上側吸着パッド及び該上側吸着パッドが取り付けられた上側吸引ユニットを備えて、前記物品の上側を吸着保持する上側支持機構と、前記物品の側方に接触する側方吸着パッド及び該側方吸着パッドが取り付けられた側方吸引ユニットを備えて、前記物品の側方を吸着保持する側方支持機構とを有する吸着装置において、
ベース部に対して前記上側吸引ユニットと一体となって昇降する昇降体と、
前記昇降体が上向きの力を作用されて前記上側吸引ユニットと共に上昇する上昇状態、及び、前記昇降体が前記上側吸引ユニットと共に前記ベース部に対して自重により下降する自重下降状態が切り替えられる切替手段と、
前記上側吸引ユニット、前記側方吸引ユニット及び前記切替手段を制御する制御手段とを備え、
前記制御手段は、前記切替手段を前記自重下降状態にし、置かれた状態の前記物品の上方に配された前記上側吸引ユニットを該昇降体と共に下降させ、置かれた状態の前記物品の上側を前記上側支持機構に吸着保持させた状態にし、前記側方支持機構に前記物品の側方を吸着保持させることを特徴とする吸着装置。
続きを表示(約 300 文字)
【請求項2】
請求項1記載の吸着装置において、前記制御手段は、前記上側吸引ユニットを吸引状態にし該上側吸引ユニットの吸引を該上側吸引ユニットの下降に寄与させることを特徴とする吸着装置。
【請求項3】
請求項1又は2記載の吸着装置において、前記上側吸着パッドは、弾性体によって形成され、前記上側支持機構が前記物品の上側を吸着保持した状態で前記上側吸引ユニット及び該物品の間で圧縮されることを特徴とする吸着装置。
【請求項4】
請求項1又は2記載の吸着装置において、前記昇降体及び前記ベース部としてのシリンダチューブを有するエアシリンダを具備することを特徴とする吸着装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、物品を吸着する吸着装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
物品の積み下ろしや搬送を行う現場では、作業の効率化や人の負担の軽減化等のため物品を吸着して持ち上げる吸着装置が利用されている。吸着装置には、物品の上側のみを吸着する特許文献1、2に開示されているものや、物品の上側に加えて側方も吸着する特許文献3に開示されているものがある。
【0003】
ここで、例えば、飲料入りのペットボトルを収容した段ボール箱の上側には、重なり合った段ボール紙片がホットメルトによって接着した継ぎ目(接着部)がある。ホットメルトによる接着力は、人が容易に継ぎ目の接着を解除して段ボール箱の上側を開放できるように調整されている。そのため、当該段ボール箱を持ち上げる場合、段ボール箱の上側のみを吸着して持ち上げようとすると、継ぎ目の接着がはずれるおそれがあることから、段ボール箱の上側及び側方を吸着する吸着装置が有効である。
【0004】
ところで、物品の上側及び側方を吸着する吸着装置は、一般的に、物品の上側を吸着する上側支持機構を物品の上側に接触する位置まで移動させ、その後、物品の上側を吸着する。物品ごとに物品の高さにばらつきがある場合、吸着装置は、画像認識技術等によって検出した物品の高さを基にして、上側支持機構の移動先の高さ位置を決定する。
【先行技術文献】
【特許文献】
【0005】
特開2000-198542号公報
特開2020-168700号公報
特開平11-70917号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、物品の高さの検出精度が一定未満であると、吸着装置は上側支持機構を物品の高さに応じた適度な高さ位置に正確に配することができない。例えば、図5に示すように、上側支持機構100が物品101に対して適度な高さ位置より高い位置に配された状態で、上側支持機構100の吸引ユニット102が吸引を始めると、側方支持機構103が物品101を吸着する前に(即ち、側方支持機構103が物品101を吸着していない状態で)、物品101が上側支持機構100に上側を吸着されて持ち上げられた状態となり、物品101の上側に過度な負荷が生じるという問題が発生する。
【0007】
なお、図5(図6も同じ)には、吸引ユニット102に物品101に接触する吸着パッド105が取り付けられ、側方支持機構103が吸引ユニット104及び吸引ユニット104に取り付けられ物品101に接触する吸着パッド106を有する例を記載している。吸着パッド105、106は、吸引ユニット102、104が物品101を吸引した際に圧縮する弾性体によって形成されている。
【0008】
一方、上側支持機構100が、図6に示すように、物品101に対して適度な高さ位置より低い位置に配された場合、上側支持機構100が物品101を押し潰す方向の負荷を物品101全体に与えるという問題が発生する。
この点、物品の高さの検出精度が一定以上のシステムを採用して、上述した問題を解消することが考えられるが、当該システムの採用は、物品の高さを検出するまでの時間が長くなったり、吸着装置全体の製造コストが高くなったりするという別の問題を招来させる。
また、物品毎の形状を揃える(例えば、物品の上側に上方に突出した突起部が形成されないようにする)精度や、設備(例えば、物品を置くパレット)の製造精度にも限界があるため、物品の高さの検出精度を一定以上にしても、物品に過度な負荷が生じる上述した問題は生じる。
【0009】
本発明は、かかる事情に鑑みてなされたもので、物品に過度な負荷がかかるのを抑制して物品を持ち上げることが可能な吸着装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
前記目的に沿う本発明に係る吸着装置は、物品の上側に接触する上側吸着パッド及び該上側吸着パッドが取り付けられた上側吸引ユニットを備えて、前記物品の上側を吸着保持する上側支持機構と、前記物品の側方に接触する側方吸着パッド及び該側方吸着パッドが取り付けられた側方吸引ユニットを備えて、前記物品の側方を吸着保持する側方支持機構とを有する吸着装置において、ベース部に対して前記上側吸引ユニットと一体となって昇降する昇降体と、前記昇降体が上向きの力の作用により前記上側吸引ユニットと共に上昇する上昇状態、及び、前記昇降体が前記上側吸引ユニットと共に前記ベース部に対して自重により下降する自重下降状態が切り替えられる切替手段と、前記上側吸引ユニット、前記側方吸引ユニット及び前記切替手段を制御する制御手段とを備え、前記制御手段は、前記切替手段を前記自重下降状態にし、置かれた状態の前記物品の上方に配された前記上側吸引ユニットを該昇降体と共に下降させ、置かれた状態の前記物品の上側を前記上側支持機構に吸着保持させた状態にし、前記側方支持機構に前記物品の側方を吸着保持させる。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
西部電機株式会社
吸着装置
29日前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
28日前
株式会社ツノダ
挟持工具
2か月前
株式会社ツノダ
挟持工具
1か月前
株式会社右川ゴム製造所
把持装置
1か月前
川崎重工業株式会社
ハンド
2か月前
個人
ロボットシステム
4か月前
株式会社不二越
ロボット
4か月前
学校法人立命館
グリッパ
1か月前
学校法人立命館
ロボットハンド
2か月前
個人
プーリーキー抜き治具
1か月前
東京都公立大学法人
ロボットハンド
2日前
CKD株式会社
電動把持装置
7日前
株式会社不二越
予測システム
2か月前
株式会社ダイヘン
情報処理装置
1か月前
株式会社ダイヘン
画像生成装置
1か月前
株式会社ダイヘン
画像生成装置
1か月前
小倉クラッチ株式会社
ロボットハンド
4か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
3か月前
株式会社中村製作所
トルクドライバー
2か月前
株式会社越智工業所
ブレーカ用カバー
4か月前
株式会社共和製作所
ロボット用アーム
15日前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
4か月前
株式会社豆蔵
ロボットハンド
1か月前
西部電機株式会社
吸着装置
29日前
西部電機株式会社
吸着装置
29日前
株式会社不二越
ロボットシステム
4か月前
個人
力制限減震装置
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ