TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024033733
公報種別
公開特許公報(A)
公開日
2024-03-13
出願番号
2022137510
出願日
2022-08-31
発明の名称
作業機
出願人
工機ホールディングス株式会社
代理人
個人
,
個人
主分類
B25F
5/00 20060101AFI20240306BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
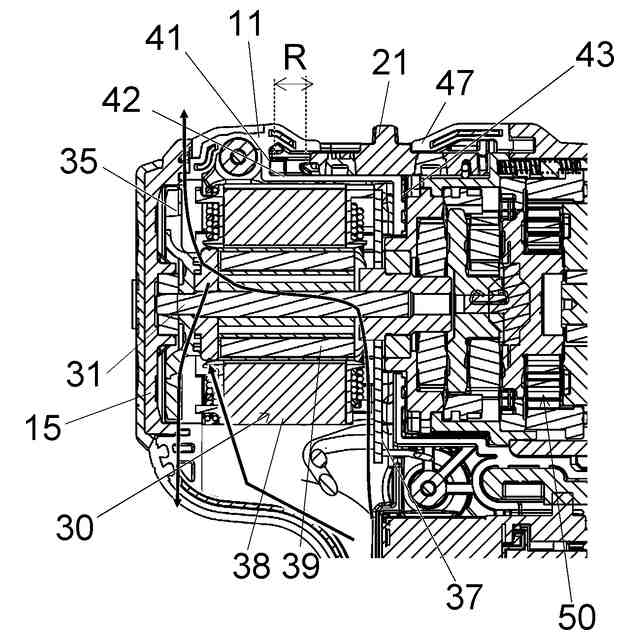
【課題】冷却性の良い作業機を提供する。
【解決手段】作業機は、モータ収容部11内に第1の壁部41及び第2の壁部42を有する。第1の壁部41は、シフトノブ21を後方に投影した領域の少なくとも一部と重なる。第1の壁部41は、前後方向においてシフトノブ21とファン35との間に位置する。第2の壁部42は、シフトノブ21の後端部の前後方向の可動域Rを下方に投影した領域の少なくとも一部に重なる。第2の壁部42は、第1の壁部41の下部から前方に延びる。第2の壁部42は、シフトノブ21とハウジング10との間の隙間を気流が通ることを抑制し、シフトノブ21とモータ30の外周部との間の少なくとも一部を仕切る第1の仕切部を構成する。
【選択図】図6
特許請求の範囲
【請求項1】
ステータ及びロータを有するモータと、
前記モータに駆動されて気流を発生するファンと、
前記モータ及び前記ファンを収容するハウジングであって、内部に前記気流が通る風路を有するハウジングと、
前記モータの駆動、停止を指示する指示部と、
前記指示部とは別の操作部であって、外部から操作できるように前記ハウジングに移動可能に支持された操作部と、
を有する作業機において、
前記操作部と前記風路を仕切るよう構成された第1の仕切部であって、前記操作部と前記ハウジングとの間の隙間から前記ハウジングの内部に前記気流が入って前記風路に流入することを抑制する第1の仕切部、及び/又は、前記ステータの下部と前記ハウジングの内面との間を前記気流が通ることを抑制する第2の仕切部、を有する、
ことを特徴とする作業機。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の作業機であって、
前記操作部の少なくとも一部が前記モータの径方向外側に位置し、
前記第1の仕切部は、前記モータの軸方向に延在して前記操作部と前記モータの外周部との間の少なくとも一部を仕切る第2の壁部を含む、
ことを特徴とする作業機。
【請求項3】
請求項2に記載の作業機であって、
前記第1の仕切部は、さらに前記第2の壁部から前記モータの軸方向と交差する方向に延在する第1の壁部を有し、
前記操作部は前記第1の壁部より前方かつ前記第2の壁部より上方の位置に設けられ、前記ステータは前記第2の壁部より下方の位置に設けられる、
ことを特徴とする作業機。
【請求項4】
請求項3に記載の作業機であって、
前記第1の仕切部は、さらに前記第2の壁部から前記モータの軸方向と交差する方向に延びる第3の壁部を有し、
前記ステータは前記第2の壁部より下方かつ前記第3の壁部より後方の位置に設けられる、
ことを特徴とする作業機。
【請求項5】
請求項2に記載の作業機であって、
前記第1の仕切部は、前記ハウジングの一部である、
ことを特徴とする作業機。
【請求項6】
請求項2に記載の作業機であって、
前記第2の壁部は、前記モータの軸方向において前記ステータの一方側の端部よりも一方側に延在する、
ことを特徴とする作業機。
【請求項7】
請求項6に記載の作業機であって、
前記第1の仕切部は、さらに前記第2の壁部から前記モータの軸方向と交差する方向に延びる第3の壁部を有し、
前記第3の壁部は、前記第2の壁部の前記軸方向における一方側の端部から延び、前記ステータの前記軸方向における一方側を覆う第1覆い部として構成される、
ことを特徴とする作業機。
【請求項8】
請求項1から7のいずれか一項に記載の作業機であって、
前記モータの回転を減速する減速機構と、
前記減速機構によって減速された前記モータの回転が伝達される出力軸と、を有し、
前記操作部は、前記モータの回転数に対する前記出力軸の回転数の比である減速比を変更する変速操作部として構成された、
ことを特徴とする作業機。
【請求項9】
請求項1から7のいずれか一項に記載の作業機であって、
前記操作部は、前記ハウジングに前記モータの軸方向に移動可能に支持される、
ことを特徴とする作業機。
【請求項10】
請求項1から7のいずれか一項に記載の作業機であって、
前記ハウジングは、
前記モータ及び前記ファンを収容する第1収容部と、
前記第1収容部から前記モータの軸方向と交差する方向に延びるハンドル部と、
前記ハンドル部の前記第1収容部とは反対側の端部に設けられ、風窓を有する第2収容部と、を含み、
前記第2収容部に収容され、前記モータへの電力供給用のスイッチング素子を搭載した制御基板を有し、
前記操作部は、前記第1収容部に支持される、
ことを特徴とする作業機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ドライバドリル等の作業機に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
下記特許文献1は、シフトノブを操作することによりギヤ比を変更可能としたドライバドリルを開示する。ドライバドリル等の作業機では、一般的にファンの回転によってハウジング内に負圧を発生させ、吸気口から外気を取り込み、制御基板やモータを冷却する。
【先行技術文献】
【特許文献】
【0003】
特開2018-89717号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明者は、シフトノブとハウジングの間の隙間を通る気流が冷却に効果的に利用されず、冷却機能が低いという課題を見出した。
【0005】
本発明の目的は、冷却性の良い作業機を提供することである。
【課題を解決するための手段】
【0006】
本発明のある態様は、作業機である。この作業機は、
ステータ及びロータを有するモータと、
前記モータに駆動されて気流を発生するファンと、
前記モータ及び前記ファンを収容するハウジングであって、内部に前記気流が通る風路を有するハウジングと、
前記モータの駆動、停止を指示する指示部と、
前記指示部とは別の操作部であって、外部から操作できるように前記ハウジングに移動可能に支持された操作部と、
を有する作業機において、
前記操作部と前記風路を仕切るよう構成された第1の仕切部であって、前記操作部と前記ハウジングとの間の隙間から前記ハウジングの内部に前記気流が入って前記風路に流入することを抑制する第1の仕切部、及び/又は、前記ステータの下部と前記ハウジングの内面との間を前記気流が通ることを抑制する第2の仕切部、を有する。
【0007】
本発明は「電動作業機」や「電動工具」、「電気機器」等と表現されてもよく、そのように表現されたものも本発明の態様として有効である。
【発明の効果】
【0008】
本発明によれば、冷却性の良い作業機を提供することができる。
【図面の簡単な説明】
【0009】
本発明の実施の形態1に係る作業機1の左側面図。
作業機1の平面図。
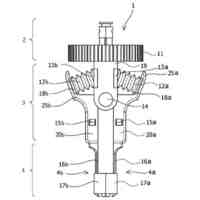
図1のA-A断面図。
作業機1を下方側から見た斜視図。
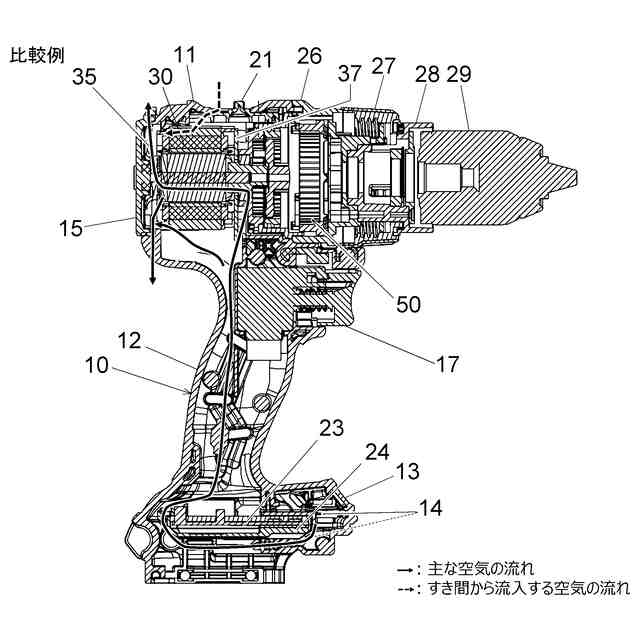
比較例に係る作業機の左側断面図。
作業機1の要部左側断面図。
本発明の実施の形態2に係る作業機の要部左側断面図。
本発明の実施の形態3に係る作業機の要部左側断面図。
本発明の実施の形態4に係る作業機の要部左側断面図。
実施の形態4の作業機におけるハウジングの左部の斜視図。
実施の形態4の作業機の要部斜視図であり、ハウジングの右部、テールカバー15、及びモータ収容部11の内部構成を省略した斜視図。
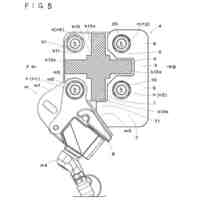
実施の形態3又は4におけるハウジングの上部を後方側から見た斜視図。
本発明の実施の形態5に係る作業機の平面図。
図13のシフトノブ21の平面図。
本発明の実施の形態6に係る作業機の要部左側断面図。
【発明を実施するための形態】
【0010】
(実施の形態1)
図1~図4、図6は、本発明の実施の形態1に係る作業機1に関する。図5は、比較例の作業機に関する。比較例の作業機は、図6に示す第2の壁部42を有さないことを除いて作業機1と同構成である。このため、作業機1の説明において図5を参照することがある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
28日前
株式会社ツノダ
挟持工具
1か月前
株式会社ツノダ
挟持工具
2か月前
株式会社右川ゴム製造所
把持装置
1か月前
川崎重工業株式会社
ハンド
2か月前
個人
ロボットシステム
4か月前
学校法人立命館
グリッパ
1か月前
トヨタ自動車株式会社
関節機構
4か月前
株式会社不二越
ロボット
4か月前
トヨタ自動車株式会社
関節機構
5か月前
学校法人立命館
ロボットハンド
2か月前
個人
プーリーキー抜き治具
1か月前
東京都公立大学法人
ロボットハンド
2日前
株式会社不二越
予測システム
2か月前
CKD株式会社
電動把持装置
7日前
工機ホールディングス株式会社
作業機
3か月前
株式会社ダイヘン
画像生成装置
1か月前
株式会社ダイヘン
情報処理装置
1か月前
株式会社ダイヘン
画像生成装置
1か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
4か月前
株式会社越智工業所
ブレーカ用カバー
4か月前
工機ホールディングス株式会社
作業機
4か月前
小倉クラッチ株式会社
ロボットハンド
4か月前
個人
スロープバリビス-ビス&-ドライバー
今日
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
3か月前
株式会社共和製作所
ロボット用アーム
15日前
株式会社中村製作所
トルクドライバー
2か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社豆蔵
ロボットハンド
1か月前
ユニタイトシステムズ株式会社
反力治具
5か月前
株式会社不二越
ロボットシステム
4か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ