TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024029960
公報種別
公開特許公報(A)
公開日
2024-03-07
出願番号
2022132458
出願日
2022-08-23
発明の名称
クリーンロボット
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
19/00 20060101AFI20240229BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットアームを効率よく冷却することが可能なクリーンロボットを提供する。
【解決手段】このクリーンロボット100では、第1シャフト部材41、第2シャフト部材42、筐体21bおよび筐体22bには、ロボットアーム20を冷却するための冷却用の液体が流れる冷却用供給流路91および冷却用排出流路92の少なくとも一方が形成されている。
【選択図】図4
特許請求の範囲
【請求項1】
クリーンルームの内部で使用されるクリーンロボットであって、
半導体基板を保持するハンドと、
先端部に前記ハンドが取り付けられ、回動軸を有する関節部と、前記関節部と接続され前記回動軸回りに回動するアーム部とを含むロボットアームと、を備え、
前記アーム部は、前記アーム部を構成するアーム構成部分を含み、
前記回動軸および前記アーム構成部分には、前記ロボットアームを冷却するための冷却用の液体が流れる冷却用供給流路および冷却用排出流路の少なくとも一方が形成されている、クリーンロボット。
続きを表示(約 980 文字)
【請求項2】
前記回動軸および前記アーム構成部分には、前記冷却用供給流路または前記冷却用排出流路に沿って配置され、前記冷却用供給流路または前記冷却用排出流路の内部から漏出した前記冷却用の液体を流すためのドレン流路が、前記冷却用供給流路および前記冷却用排出流路とは別個に形成されている、請求項1に記載のクリーンロボット。
【請求項3】
前記冷却用供給流路および前記冷却用排出流路の各々は、前記ロボットアームの前記先端部から前記ロボットアームの根元部まで延びている、請求項1に記載のクリーンロボット。
【請求項4】
前記冷却用供給流路または前記冷却用排出流路に沿って配置され、前記冷却用供給流路または前記冷却用排出流路の内部から漏出した前記冷却用の液体を流すためのドレン流路が、前記ロボットアームの前記先端部から前記ロボットアームの前記根元部まで延びている、請求項3に記載のクリーンロボット。
【請求項5】
前記冷却用供給流路と前記冷却用排出流路とが、前記ロボットアームの前記先端部において接続されているとともに、前記冷却用供給流路に対して前記冷却用排出流路が折り返されている、請求項3に記載のクリーンロボット。
【請求項6】
前記回動軸は、シャフト部材を含み、
前記シャフト部材の内部には、前記シャフト部材の軸方向に延びるように、前記冷却用供給流路および前記冷却用排出流路の少なくとも一方が形成されている、請求項1に記載のクリーンロボット。
【請求項7】
前記関節部は、前記シャフト部材を収容するシャフト収容ハウジングをさらに有し、
前記シャフト収容ハウジングと前記シャフト部材との間には、前記冷却用供給流路および前記冷却用排出流路の少なくとも一方が形成されている、請求項6に記載のクリーンロボット。
【請求項8】
前記アーム構成部分は、筐体を含み、
前記筐体には、前記アーム部の長手方向に沿って延びるように、前記冷却用供給流路および前記冷却用排出流路の少なくとも一方が形成されている、請求項1に記載のクリーンロボット。
【請求項9】
真空の前記クリーンルーム内で使用される、請求項1に記載のクリーンロボット。
発明の詳細な説明
【技術分野】
【0001】
この開示は、クリーンロボットに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、真空チャンバの内部で使用されるクリーンロボットが知られている。たとえば、特許文献1には、ワークを保持するハンドと、先端部にハンドが取り付けられたロボットアームと、を備えるクリーンロボットが開示されている。特許文献1に開示されているクリーンロボットでは、ロボットアームの内部の発熱部品を冷却するために、ロボットアームの内部には、冷却用の気体が供給される。
【先行技術文献】
【特許文献】
【0003】
特開平4-372390号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、上記特許文献1には記載されていないが、上記特許文献1に記載されているような従来のクリーンロボットでは、ハンドが保持するワークが比較的高温になる場合がある。この場合、ハンドが取り付けられたロボットアームの熱による劣化を抑制するために、ロボットアーム自体を冷却する必要がある。しかしながら、上記特許文献1に記載されているクリーンロボットのように、ロボットアームの内部に冷却用の気体を供給した場合、気体は熱伝導率が比較的低いので、ロボットアームを効率的に冷却できないと考えられる。このため、ロボットアームを効率よく冷却することが可能なクリーンロボットが望まれている。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、ロボットアームを効率よく冷却することが可能なクリーンロボットを提供することである。
【課題を解決するための手段】
【0006】
上記目的を達成するために、この開示の一の局面によるクリーンロボットは、クリーンルーム内で使用されるクリーンロボットであって、半導体基板を保持するハンドと、先端部にハンドが取り付けられ、回動軸を有する関節部と、関節部と接続され回動軸回りに回動するアーム部とを含むロボットアームと、を備え、アーム部は、アーム部を構成するアーム構成部分を含み、回動軸およびアーム構成部分には、ロボットアームを冷却するための冷却用の液体が流れる冷却用供給流路および冷却用排出流路が形成されている。
【0007】
この開示の一の局面によるクリーンロボットでは、上記のように、回動軸およびアーム構成部分には、ロボットアームを冷却するための冷却用の液体が流れる冷却用供給流路および冷却用排出流路が形成されている。これにより、液体は気体よりも熱伝導率が高いので、冷却用供給流路および冷却用排出流路に流れる冷却用の液体によって、ロボットアームを効率よく冷却することができる。また、冷却用供給流路および冷却用排出流路が、ロボットアームの一部である回動軸およびアーム構成部分に設けられるので、部品点数の増加および構造の複雑化を抑制しながら、冷却用供給流路および冷却用排出流路を形成することができる。
【発明の効果】
【0008】
本開示によれば、上記のように、ロボットアームを効率よく冷却することが可能なクリーンロボットを提供することができる。
【図面の簡単な説明】
【0009】
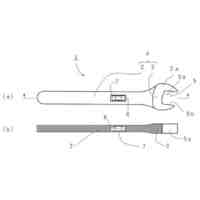
本開示の一実施形態によるクリーンロボットの全体構成を示した側面図である。
本開示の一実施形態によるクリーンロボットの全体構成を示した平面図である。
本開示の一実施形態によるクリーンロボットのロボットアームを示した断面図である。
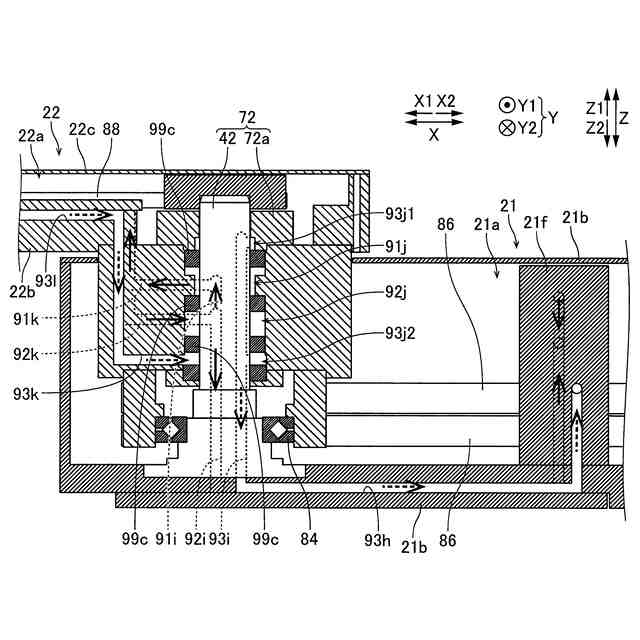
本開示の一実施形態によるクリーンロボットのロボットアームの第1関節部の近傍を示した断面図である。
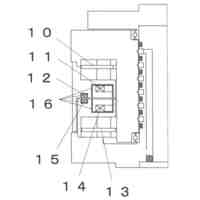
本開示の一実施形態によるクリーンロボットのロボットアームの第1アーム部を示した平面図である。
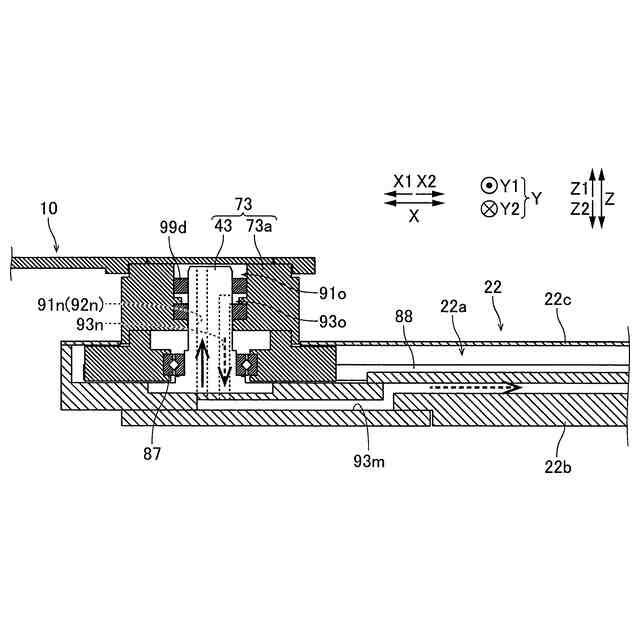
本開示の一実施形態によるクリーンロボットのロボットアームの第2関節部の近傍を示した断面図である。
本開示の一実施形態によるクリーンロボットのロボットアームの第3関節部の近傍を示した断面図である。
本開示の一実施形態によるクリーンロボットのロボットアームの第2アーム部を示した平面図である。
本開示の一実施形態によるクリーンロボットのロボットアームの第1関節部の近傍を示したX方向に見た断面図である。
図5の900-900線に沿った断面図である。
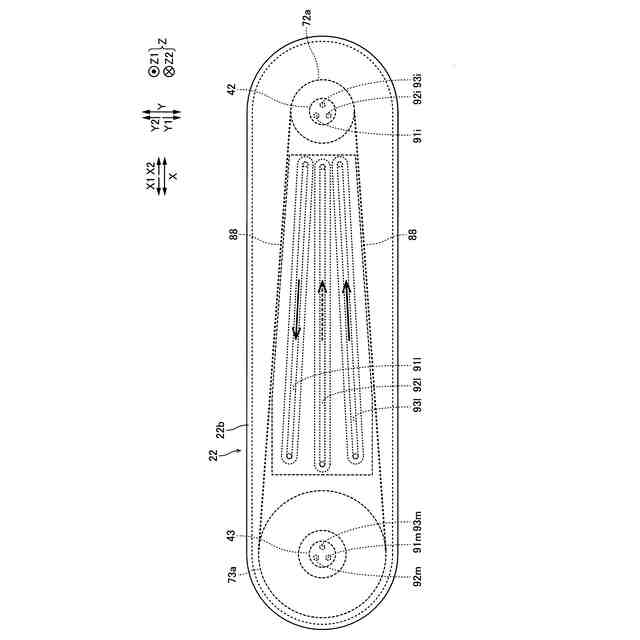
本開示の一実施形態によるクリーンロボットのロボットアームの第2アーム部の先端側の部分を下方から見た平面図である。
【発明を実施するための形態】
【0010】
以下、本開示を具体化した実施形態を図面に基づいて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
5か月前
株式会社フジキン
レンチ
7か月前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
28日前
UTM株式会社
搬送装置
5か月前
株式会社ツノダ
挟持工具
1か月前
株式会社ツノダ
挟持工具
2か月前
個人
ペットボトル用蓋開け具。
6か月前
株式会社右川ゴム製造所
把持装置
1か月前
川崎重工業株式会社
ハンド
2か月前
個人
ロボットシステム
4か月前
学校法人立命館
グリッパ
1か月前
株式会社不二越
ロボット
6か月前
株式会社不二越
ロボット
4か月前
学校法人立命館
ロボットハンド
2か月前
トヨタ自動車株式会社
関節機構
5か月前
トヨタ自動車株式会社
関節機構
4か月前
個人
作業台
5か月前
個人
プーリーキー抜き治具
1か月前
オムロン株式会社
ロボットハンド
6か月前
株式会社不二越
予測システム
2か月前
東京都公立大学法人
ロボットハンド
2日前
CKD株式会社
電動把持装置
7日前
株式会社近藤製作所
ロータリージョイント
7か月前
川崎重工業株式会社
ロボット
6か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社共和製作所
ロボット用アーム
15日前
小倉クラッチ株式会社
ロボットハンド
4か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社ダイヘン
画像生成装置
1か月前
国立大学法人東北大学
剛性可変連結体
5か月前
工機ホールディングス株式会社
作業機
4か月前
個人
スロープバリビス-ビス&-ドライバー
今日
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
3か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ