TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2023136282
公報種別
公開特許公報(A)
公開日
2023-09-29
出願番号
2022041809
出願日
2022-03-16
発明の名称
把持装置およびその製造方法
出願人
地方独立行政法人北海道立総合研究機構
,
学校法人立命館
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
15/12 20060101AFI20230922BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】 肉厚が薄くても把持部材を湾曲させ得る内圧に耐えられる程度に強度や耐久性を向上させ、狭い空間における作業や細かい作業を行うことができる把持装置およびその製造方法を提供する。
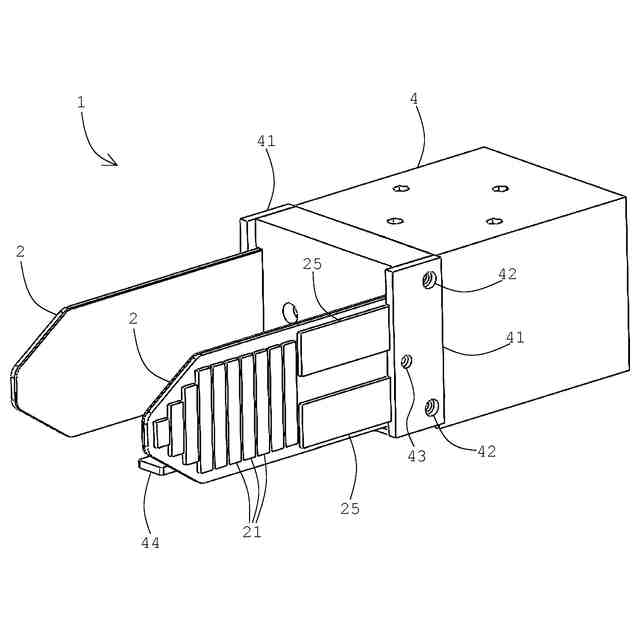
【解決手段】 対象物を把持可能な把持装置1であって、内部に気室22を備えた複数の突起21が隣接配置されているとともに、気室22のそれぞれに連通する通気路23を備え、柔軟材料によって形成された把持部材2と、気室22および通気路23の少なくとも一部に封入された骨格部材3と、を有し、通気路23に気体を圧入すると、気室22または気室22の内壁面と骨格部材3との隙間に気体が流入し、突起21が膨張することによって湾曲する。
【選択図】 図1
特許請求の範囲
【請求項1】
対象物を把持可能な把持装置であって、
内部に気室を備えた複数の突起が隣接配置されているとともに、前記気室のそれぞれに連通する通気路を備え、柔軟材料によって形成された把持部材と、
前記気室および前記通気路の少なくとも一部に封入された骨格部材と、
を有し、
前記通気路に気体を圧入すると、前記気室または前記気室の内壁面と前記骨格部材との隙間に気体が流入し、前記突起が膨張することによって湾曲する、把持装置。
続きを表示(約 690 文字)
【請求項2】
前記把持部材と前記骨格部材とは、互いに接着しない材料によって形成されている、請求項1に記載の把持装置。
【請求項3】
前記把持部材と前記骨格部材との接触面には、互いに接着するのを防止する接着防止剤が塗布されている、請求項1に記載の把持装置。
【請求項4】
前記骨格部材は、前記気室および前記通気路の全てを充填する形状を有している、請求項1から請求項3のいずれかに記載の把持装置。
【請求項5】
内部に気室を備えた複数の突起が隣接配置されているとともに、前記気室のそれぞれに連通する通気路を備え、柔軟材料によって形成された把持部材の一側面を開放した状態で形成する把持部材形成工程と、
前記気室および前記通気路の少なくとも一部に封入可能な骨格部材を形成する骨格部材形成工程と、
前記気室および前記通気路の少なくとも一部に骨格部材を充填する骨格部材充填工程と、
前記骨格部材を充填した前記把持部材の一側面に液状の前記柔軟材料を流し込んで硬化させ前記骨格部材を封入する骨格部材封入工程と、
を有する、把持装置の製造方法。
【請求項6】
前記把持部材と前記骨格部材とは、互いに接着しない材料によって形成されている、請求項5に記載の把持装置の製造方法。
【請求項7】
前記骨格部材充填工程の前に、前記把持部材と前記骨格部材との接触面に、互いに接着するのを防止する接着防止剤を塗布する接着防止剤塗布工程を有している、請求項5に記載の把持装置の製造方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、対象物を把持可能な把持装置およびその製造方法に関するものである。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、ロボットハンド等に代表される把持装置として、柔軟な材料によって形成され、空気圧によって湾曲するものが知られている。例えば、特開昭61-203287号公報には、柔軟な材料から成る管状体の一側壁に蛇腹部分を設け、その対向する側壁に板状部分を設け、内圧を高めることによって湾曲するロボットハンド用指が開示されている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開昭61-203287号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載されたロボットハンド用指を含め、従来の把持装置は、指先を曲げ把持できる程度の圧力で空気を圧入しても破裂や破損しないように、厚めの肉厚に形成されている。このため、狭い空間における作業や細かい作業には不向きであり、また把持力の制御が難しいという問題がある。
【0005】
一方、肉厚を薄めに形成すると、強度や耐久性が低下し、破裂や破損のおそれがあるため、内圧を低くせざるを得ない。しかしながら、内圧が低いと把持力が低下したり、自重によって撓みが生じ易くなり、対象物の把持が困難になるという問題がある。
【0006】
本発明は、このような問題点を解決するためになされたものであって、肉厚が薄くても把持部材を湾曲させ得る内圧に耐えられる程度に強度や耐久性を向上させ、狭い空間における作業や細かい作業を行うことができる把持装置およびその製造方法を提供することを目的としている。
【課題を解決するための手段】
【0007】
本発明に係る把持装置は、肉厚が薄くても把持部材を湾曲させ得る内圧に耐えられる程度に強度や耐久性を向上させ、狭い空間における作業や細かい作業を行うという課題を解決するために、対象物を把持可能な把持装置であって、内部に気室を備えた複数の突起が隣接配置されているとともに、前記気室のそれぞれに連通する通気路を備え、柔軟材料によって形成された把持部材と、前記気室および前記通気路の少なくとも一部に封入された骨格部材と、を有し、前記通気路に気体を圧入すると、前記気室または前記気室の内壁面と前記骨格部材との隙間に気体が流入し、前記突起が膨張することによって湾曲する。
【0008】
また、本発明の一態様として、前記把持部材と前記骨格部材とが接着してしまうのを防止し、両者の隙間に確実に気体を流入させるという課題を解決するために、前記把持部材と前記骨格部材とは、互いに接着しない材料によって形成されていてもよい。
【0009】
さらに、本発明の一態様として、前記把持部材と前記骨格部材とが接着してしまうのを防止し、両者の隙間に確実に気体を流入させるという課題を解決するために、前記把持部材と前記骨格部材との接触面には、互いに接着するのを防止する接着防止剤が塗布されていてもよい。
【0010】
また、本発明の一態様として、前記骨格部材による強度および耐久性の向上の効果をより一層高めるという課題を解決するために、前記骨格部材は、前記気室および前記通気路の全てを充填する形状を有していてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
5か月前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
28日前
株式会社ツノダ
挟持工具
1か月前
株式会社ツノダ
挟持工具
2か月前
UTM株式会社
搬送装置
5か月前
株式会社右川ゴム製造所
把持装置
1か月前
川崎重工業株式会社
ハンド
2か月前
個人
ロボットシステム
4か月前
トヨタ自動車株式会社
関節機構
4か月前
学校法人立命館
ロボットハンド
2か月前
株式会社不二越
ロボット
4か月前
トヨタ自動車株式会社
関節機構
5か月前
学校法人立命館
グリッパ
1か月前
個人
プーリーキー抜き治具
1か月前
個人
作業台
5か月前
株式会社不二越
予測システム
2か月前
東京都公立大学法人
ロボットハンド
2日前
CKD株式会社
電動把持装置
7日前
株式会社ダイヘン
画像生成装置
1か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
3か月前
株式会社ダイヘン
情報処理装置
1か月前
株式会社中村製作所
トルクドライバー
2か月前
工機ホールディングス株式会社
作業機
3か月前
国立大学法人東北大学
剛性可変連結体
5か月前
小倉クラッチ株式会社
ロボットハンド
4か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
4か月前
個人
スロープバリビス-ビス&-ドライバー
今日
工機ホールディングス株式会社
作業機
4か月前
株式会社共和製作所
ロボット用アーム
15日前
株式会社ダイヘン
画像生成装置
1か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社越智工業所
ブレーカ用カバー
4か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ


































