TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2023117240
公報種別
公開特許公報(A)
公開日
2023-08-23
出願番号
2022019847
出願日
2022-02-10
発明の名称
多軸締付機
出願人
株式会社マキタ
代理人
個人
,
個人
主分類
B25B
23/14 20060101AFI20230816BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】不慣れな作業者でも安定した作業品質を維持でき、良好な作業効率も得られるようにする。
【解決手段】多軸締付機による締付作業において、コントローラは、S1でスイッチがONすると、S2でモータを駆動させる。そして、コントローラは、S3の判別でモータの負荷率が所定の閾値に到達したことを確認し、S4の判別でモータの回転軸の回転角度が所定の判定回転角度に到達したことを確認したら、締付が完了したと判定してS5でモータの駆動を停止させる。
【選択図】図7
特許請求の範囲
【請求項1】
1つのモータと、
前記モータの駆動により同時に回転する少なくとも2つの回転部と、
各前記回転部からそれぞれ回転が伝達され、締結部材を装着可能な少なくとも2つの出力部と、
各前記回転部と各前記出力部との間にそれぞれ介在され、所定のトルクで回転伝達を遮断するクラッチと、
前記モータの駆動を制御するコントローラと、を含み、
前記コントローラは、各前記回転部の回転による前記締結部材の締付作業の際、前記モータの負荷率と前記モータの回転軸の回転角度とを監視し、
前記負荷率が所定の閾値に到達し、その後前記回転角度が所定の判定回転角度に到達したら、全ての前記回転部において締付完了と判定して前記モータの駆動を停止させる多軸締付機。
続きを表示(約 820 文字)
【請求項2】
前記コントローラは、前記負荷率が前記閾値に到達しても、前記回転軸の回転角度が、前記締結部材が着座するまでのねじ山の数に基づいて設定される所定の着座回転角度に到達していなければ、前記締結部材が不良と判定して前記モータの駆動を停止させる請求項1に記載の多軸締付機。
【請求項3】
前記コントローラは、前記負荷率が前記閾値に到達した後、前記回転角度が前記判定回転角度に到達する前に、前記負荷率が、前記閾値よりも大きい第2の閾値に到達しなければ、少なくとも1つの前記出力部において前記締結部材が未装着と判定して前記モータの駆動を停止させる請求項1又は2に記載の多軸締付機。
【請求項4】
前記負荷率は、前記モータの電流値である請求項1乃至3の何れかに記載の多軸締付機。
【請求項5】
前記閾値は、各前記クラッチの下限トルクの合計に基づいて設定される請求項1乃至4の何れかに記載の多軸締付機。
【請求項6】
前記判定回転角度は、少なくとも、前記回転部の数に360°を乗じた角度である請求項1乃至5の何れかに記載の多軸締付機。
【請求項7】
前記締付完了を報知する報知手段を備えている請求項1乃至6の何れかに記載の多軸締付機。
【請求項8】
前記締結部材の不良又は前記締結部材の未装着を報知するエラー報知手段を備えている請求項2又は3に記載の多軸締付機。
【請求項9】
各前記クラッチは、摩擦クラッチである請求項1乃至8の何れかに記載の多軸締付機。
【請求項10】
各前記回転部は、駆動側筒部をそれぞれ含み、各前記出力部は、従動側筒部をそれぞれ含んでおり、前記摩擦クラッチは、前記駆動側筒部と前記従動側筒部との間に設けられている請求項9に記載の多軸締付機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、1つのモータで複数のボルト又はナット等の締結部材を同時に締め付け可能な多軸締付機(ナットランナと称されることもある)に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
多軸締付機は、1つのモータと、複数の回転部とを有している。モータの回転軸と各回転部との間には、回転軸の回転或いは減速機構で減速した回転を各回転部へ同時に伝達する伝達機構(例えばギヤやベルトプーリ等)が設けられている。
各回転部には、クラッチを介して出力部が設けられている。出力部に装着したソケットをボルトの頭部等に嵌合させることで、クラッチが作動する所定のトルクでボルト等の締付が可能となる。
特許文献1には、ハウジングから突出させた複数の回転軸(回転部)に、クラッチを介して減速ギヤ及び出力軸(出力部)をそれぞれ設けた多軸締付機が開示されている。ここでは減速ギヤに設けたトルクセンサで一定のトルク値を検出すると、クラッチを動作させて回転軸の回転を減速ギヤに伝達させないようにしている。
【先行技術文献】
【特許文献】
【0003】
特開平6-262454号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来の多軸締付機では、各回転部ごとにボルトが着座して締付が進むと、それぞれクラッチが独立して作動してトルクを遮断する。よって、作業者は、全ての回転部においてクラッチの作動を確認すると、トリガスイッチの押し込みを解除してモータを停止させ、締付作業を終了させる。しかし、不慣れな作業者では全ての回転部でのクラッチの作動が確認しづらい。よって、早いタイミングでモータを停止させて締付不足が生じ、作業品質を低下させたり、全てのクラッチが作動してもモータの駆動を継続させて余計な時間がかかり、作業効率を低下させたりしてしまう。
【0005】
そこで、本開示は、不慣れな作業者でも安定した作業品質を維持でき、良好な作業効率が得られる多軸締付機を提供することを目的としたものである。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本開示は、1つのモータと、
モータの駆動により同時に回転する少なくとも2つの回転部と、
各回転部からそれぞれ回転が伝達され、締結部材を装着可能な少なくとも2つの出力部と、
各回転部と各出力部との間にそれぞれ介在され、所定のトルクで回転伝達を遮断するクラッチと、
モータの駆動を制御するコントローラと、を含むものであってもよい。
そして、コントローラは、各回転部の回転による締結部材の締付作業の際、モータの負荷率とモータの回転軸の回転角度とを監視し、
負荷率が所定の閾値に到達し、その後回転角度が所定の判定回転角度に到達したら、全ての回転部において締付完了と判定してモータの駆動を停止させるものであってもよい。
【発明の効果】
【0007】
本開示によれば、締付完了の判定及びモータの停止を自動制御で行うことができる。よって、不慣れな作業者でも、早いタイミングでモータを停止させたり、全てのクラッチが作動してもモータの駆動を継続させたりすることがなくなる。このため、安定した作業品質を維持でき、良好な作業効率が得られる。
【図面の簡単な説明】
【0008】
多軸締付機の斜視図である。
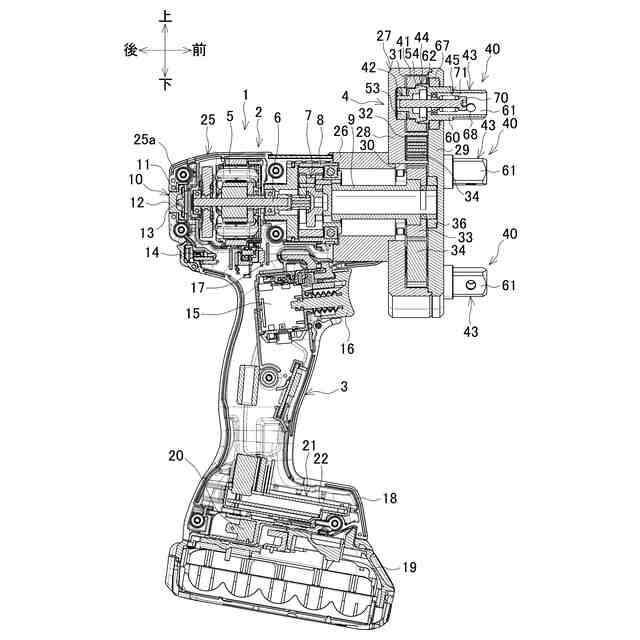
多軸締付機の中央縦断面図である。
前ハウジングを省略した駆動部の正面図である。
図2の締付部部分の拡大図である。
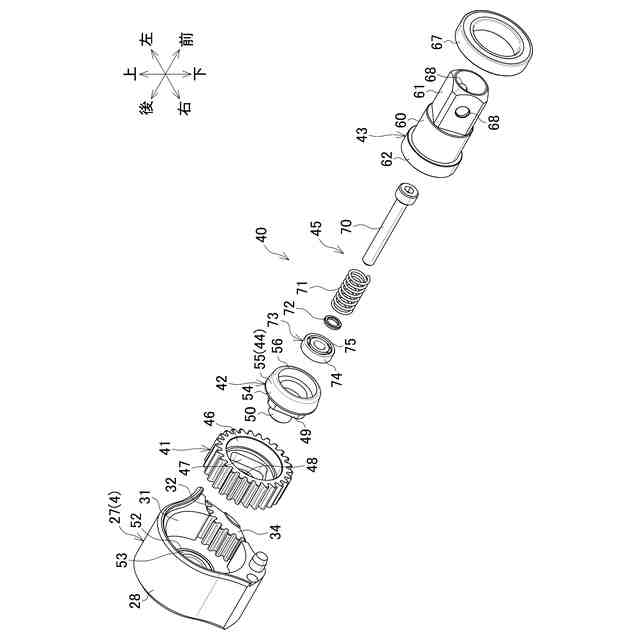
締付部の前方からの分解斜視図である。
締付部の後方からの分解斜視図である。
締付制御のフローチャートである。
締付制御の変更例のフローチャートである。
【発明を実施するための形態】
【0009】
本開示の一実施形態において、コントローラは、負荷率が閾値に到達しても、回転軸の回転角度が、締結部材が着座するまでのねじ山の数に基づいて設定される所定の着座回転角度に到達していなければ、締結部材が不良と判定してモータの駆動を停止させるものであってもよい。
この構成によれば、締結部材に傷等の欠陥があればこれを判定して締付作業を停止させることができる。
本開示の一実施形態において、コントローラは、負荷率が閾値に到達した後、回転角度が判定回転角度に到達する前に、負荷率が、閾値よりも大きい第2の閾値に到達しなければ、少なくとも1つの出力部において締結部材が未装着と判定してモータの駆動を停止させるものであってもよい。
この構成によれば、締結部材に欠品があればこれを判定して締付作業を停止させることができる。
【0010】
本開示の一実施形態において、負荷率は、モータの電流値であってもよい。
この構成によれば、負荷率が容易に把握できる。
本開示の一実施形態において、閾値は、各クラッチの下限トルクの合計に基づいて設定されるものであってもよい。
この構成によれば、各クラッチの精度にばらつきがあっても締付完了前の一定のトルクを基準にして閾値が設定できる。
本開示の一実施形態において、判定回転角度は、少なくとも、回転部の数に360°を乗じた角度であってもよい。
この構成によれば、複数の締結部材で螺合の係り始めにばらつきがあっても、着座した最初の締結部材と最後の締結部材との最大差分は回転を継続させて、締付完了の判定に必要な回転角度を設定できる。
本開示の一実施形態において、多軸締付機は、締付完了を報知する報知手段を備えていてもよい。
この構成によれば、作業者は、締付完了を容易に認識できる。
本開示の一実施形態において、多軸締付機は、締結部材の不良又は締結部材の未装着を報知するエラー報知手段を備えていてもよい。
この構成によれば、作業者は、モータの停止が締結部材の不良又は未装着によることを容易に認識できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社マキタ
清掃装置
8日前
株式会社マキタ
清掃装置
17日前
株式会社マキタ
電動作業機
9日前
株式会社マキタ
電動工具、及び電動工具におけるモータの制御方法
9日前
株式会社マキタ
鉄筋結束ロボット、および鉄筋結束装置によって鉄筋交差箇所を結束する方法
3日前
個人
釘抜き機
5か月前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
29日前
株式会社ツノダ
挟持工具
1か月前
UTM株式会社
搬送装置
5か月前
株式会社ツノダ
挟持工具
2か月前
個人
ペットボトル用蓋開け具。
6か月前
川崎重工業株式会社
ハンド
2か月前
株式会社右川ゴム製造所
把持装置
1か月前
個人
ロボットシステム
4か月前
トヨタ自動車株式会社
関節機構
5か月前
学校法人立命館
グリッパ
1か月前
株式会社不二越
ロボット
4か月前
トヨタ自動車株式会社
関節機構
4か月前
学校法人立命館
ロボットハンド
2か月前
株式会社不二越
ロボット
6か月前
個人
プーリーキー抜き治具
1か月前
オムロン株式会社
ロボットハンド
6か月前
個人
作業台
5か月前
川崎重工業株式会社
ロボット
7か月前
株式会社不二越
予測システム
2か月前
CKD株式会社
電動把持装置
8日前
東京都公立大学法人
ロボットハンド
3日前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社共和製作所
ロボット用アーム
16日前
株式会社越智工業所
ブレーカ用カバー
4か月前
工機ホールディングス株式会社
作業機
3か月前
株式会社ダイヘン
画像生成装置
1か月前
工機ホールディングス株式会社
作業機
4か月前
小倉クラッチ株式会社
ロボットハンド
4か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ

































