TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024059272
公報種別
公開特許公報(A)
公開日
2024-05-01
出願番号
2022166856
出願日
2022-10-18
発明の名称
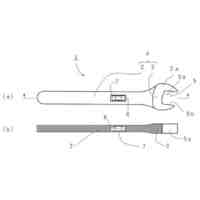
電動工具、及び電動工具におけるモータの制御方法
出願人
株式会社マキタ
代理人
名古屋国際弁理士法人
主分類
B25F
5/00 20060101AFI20240423BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】モータ駆動開始時からの回転速度の加速具合が電源電圧の大きさによってばらつくのを抑制する。
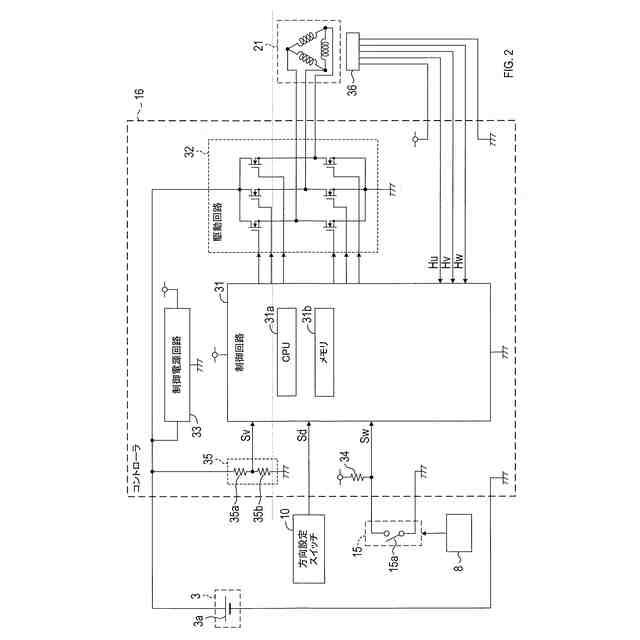
【解決手段】電動工具は、モータと、駆動回路と、電圧検出部と、目標算出部と、設定デューティ比算出部とを備える。駆動回路は、設定デューティ比に従って、モータへ電源電圧を印加する。電圧検出部は、電源電圧の大きさを検出する。目標算出部は、検出された電源電圧の大きさに基づいて、目標回転速度でモータを回転させるための目標デューティ比を算出する。設定デューティ比算出部は、設定デューティ比を、初期値から目標デューティ比まで時間経過に伴って増加させる。設定デューティ比の増加率は、検出された電源電圧の大きさに応じて変化する。
【選択図】図3
特許請求の範囲
【請求項1】
モータと、
電源電圧、及び設定デューティ比を有する駆動信号が入力され、前記駆動信号の前記設定デューティ比に応じた周期で前記電源電圧を前記モータへ印加することにより前記モータを駆動するように構成された駆動回路と、
前記電源電圧の大きさを検出するように構成された電圧検出部と、
所定の目標回転速度で前記モータを回転させるための前記設定デューティ比の目標値である目標デューティ比を、前記電圧検出部にて検出された前記電源電圧の大きさに基づいて算出するように構成された目標算出部と、
前記設定デューティ比を所定の初期値から前記目標デューティ比まで時間経過に伴って増加させるように構成され、前記設定デューティ比の増加率を、前記電圧検出部にて検出された前記電源電圧の大きさに応じて変化させるように構成された、設定デューティ比算出部と、
を備える電動工具。
続きを表示(約 1,200 文字)
【請求項2】
請求項1に記載の電動工具であって、
前記設定デューティ比算出部は、前記増加率を切り替えるべき切替条件が満たされた場合に、前記増加率を、当該切替条件が満たされた時の前記増加率よりも低い値に切り替えるように構成されている、電動工具。
【請求項3】
請求項2に記載の電動工具であって、
さらに、前記電圧検出部にて検出された前記電源電圧の大きさに応じて前記切替条件を設定するように構成された条件設定部を備える、電動工具。
【請求項4】
請求項2または請求項3に記載の電動工具であって、
前記切替条件は、算出されている前記設定デューティ比が、1つ以上の規定デューティ比のそれぞれに到達する度に、成立する、電動工具。
【請求項5】
請求項3に記載の電動工具であって、
前記条件設定部は、前記電圧検出部にて検出された前記電源電圧の大きさに基づいて1つ以上の規定デューティ比を算出するように構成されており、
前記切替条件は、算出されている前記設定デューティ比が、算出された前記1つ以上の規定デューティ比のそれぞれに到達する度に、成立する、
電動工具。
【請求項6】
請求項5に記載の電動工具であって、
前記条件設定部は、前記1つ以上の規定デューティ比のそれぞれを、前記電圧検出部にて検出された前記電源電圧が高いほど低くなるように算出するように構成されている、電動工具。
【請求項7】
請求項4~請求項6のいずれか1項に記載の電動工具であって、
前記1つ以上の規定デューティ比は、少なくとも2つの規定デューティ比を含む、電動工具。
【請求項8】
請求項2または請求項3に記載の電動工具であって、
前記切替条件は、所定の計測開始タイミングから、1つ以上の規定時間のそれぞれが経過する度に成立し、
前記計測開始タイミングは、前記モータを駆動すべき駆動条件が満たされたことに応じて到来する、
電動工具。
【請求項9】
請求項3に記載の電動工具であって、
前記条件設定部は、前記電圧検出部にて検出された前記電源電圧の大きさに基づいて1つ以上の規定時間を算出するように構成されており、
前記切替条件は、所定の計測開始タイミングから、算出された前記1つ以上の規定時間のそれぞれが経過する度に成立し、
前記計測開始タイミングは、前記モータを駆動すべき駆動条件が満たされたことに応じて到来する、
電動工具。
【請求項10】
請求項9に記載の電動工具であって、
前記条件設定部は、前記1つ以上の規定時間のそれぞれを、前記電圧検出部にて検出された前記電源電圧が高いほど短くなるように算出するように構成されている、電動工具。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、電動工具におけるモータを制御する技術に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1は、ソフトスタート制御を行うように構成された電動工具を開示している。この電動工具では、PWM駆動信号に従って電源電圧がモータに印加されてモータが駆動される。ソフトスタート制御は、モータの駆動開始時に、PWM駆動信号のデューティ比を0%から目標値まで徐々に増加することを含む。電源電圧はバッテリから供給される。
【先行技術文献】
【特許文献】
【0003】
特開2011-240441号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
バッテリの充電残量その他の要因により、モータ駆動開始時の電源電圧の大きさは変化し得る。駆動開始時の電源電圧が異なると、駆動開始後のモータの回転速度の加速具合も異なり得る。例えば、駆動開始時から一定時間経過した時点の回転速度が、電源電圧の大きさに応じて異なり得る。
【0005】
回転速度の加速具合のばらつきは、電動工具による作業結果に好ましくない影響を及ぼし得る。例えば、ネジを被締結材に締め付ける作業を行う際に、電源電圧の大きさによって、締め付けトルクにばらつきが生じる可能性がある。
【0006】
本開示の一局面は、モータ駆動開始時からの回転速度の加速具合が電源電圧の大きさによってばらつくのを抑制できることが望ましい。
【課題を解決するための手段】
【0007】
本開示の一局面は、モータと、駆動回路と、電圧検出部と、目標算出部と、設定デューティ比算出部とを備えた電動工具を提供する。
駆動回路は、電源電圧及び駆動信号が入力される。駆動信号は設定デューティ比を有する。駆動回路は、入力された駆動信号の設定デューティ比に応じた周期で電源電圧をモータへ印加することにより、モータを駆動する。
【0008】
電圧検出部は、電源電圧の大きさを検出する。
目標算出部は、電圧検出部にて検出された電源電圧の大きさに基づいて目標デューティ比を算出する。目標デューティ比は、所定の目標回転速度でモータを回転させるための、設定デューティ比の目標値である。
【0009】
設定デューティ比算出部は、設定デューティ比を算出する。設定デューティ比算出部は、設定デューティ比を、所定の初期値から目標デューティ比まで時間経過に伴って増加させる。設定デューティ比算出部は、設定デューティ比の増加率を、電圧検出部にて検出された電源電圧の大きさに応じて変化させる。
【0010】
このような電動工具は、モータ駆動開始時からの回転速度の加速具合が電源電圧の大きさによってばらつくのを抑制することができる。
本開示の別の一局面では、前述のモータと、前述の駆動回路と、前述の電圧検出部と、前述の目標算出部と、前述の設定デューティ比算出部とは異なる設定デューティ比算出部とを備えた電動工具を提供する。この設定デューティ比算出部は、電圧検出部にて検出された前記電源電圧の大きさに基づいて、前記設定デューティ比を所定の初期値から前記目標デューティ比まで時間経過に伴って増加させる。このとき、設定デューティ比算出部は、前記モータが回転し始めてから前記モータの回転速度が前記目標回転速度に到達するまでの前記回転速度の変化過程が、前記電源電圧の大きさによらず同一または略同一となるように、前記設定デューティ比を増加させる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
6か月前
個人
ねじ締め装置
5か月前
株式会社フジキン
レンチ
7か月前
日東精工株式会社
搬送装置
1か月前
UTM株式会社
搬送装置
6か月前
株式会社ツノダ
挟持工具
3か月前
株式会社ツノダ
挟持工具
1か月前
個人
ペットボトル用蓋開け具。
6か月前
株式会社右川ゴム製造所
把持装置
1か月前
川崎重工業株式会社
ハンド
3か月前
個人
ロボットシステム
5か月前
株式会社不二越
ロボット
5か月前
株式会社不二越
ロボット
7か月前
学校法人立命館
ロボットハンド
2か月前
学校法人立命館
グリッパ
2か月前
トヨタ自動車株式会社
関節機構
5か月前
トヨタ自動車株式会社
関節機構
5か月前
個人
作業台
6か月前
個人
プーリーキー抜き治具
2か月前
オムロン株式会社
ロボットハンド
7か月前
株式会社近藤製作所
ロータリージョイント
7か月前
東京都公立大学法人
ロボットハンド
14日前
株式会社不二越
予測システム
3か月前
CKD株式会社
電動把持装置
19日前
川崎重工業株式会社
ロボット
7か月前
宮川工機株式会社
板状部品移動装置
4日前
工機ホールディングス株式会社
作業機
4か月前
国立大学法人東北大学
剛性可変連結体
6か月前
工機ホールディングス株式会社
作業機
5か月前
株式会社共和製作所
ロボット用アーム
27日前
工機ホールディングス株式会社
作業機
5か月前
株式会社越智工業所
ブレーカ用カバー
5か月前
工機ホールディングス株式会社
作業機
4か月前
株式会社中村製作所
トルクドライバー
2か月前
小倉クラッチ株式会社
ロボットハンド
4か月前
工機ホールディングス株式会社
作業機
3か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ