TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2023117947
公報種別
公開特許公報(A)
公開日
2023-08-24
出願番号
2022020782
出願日
2022-02-14
発明の名称
ロボット
出願人
川崎重工業株式会社
代理人
個人
主分類
B25J
19/00 20060101AFI20230817BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットの大型化及び構造の複雑化を軽減しつつ、制御ユニットの温度上昇を適切に軽減する。
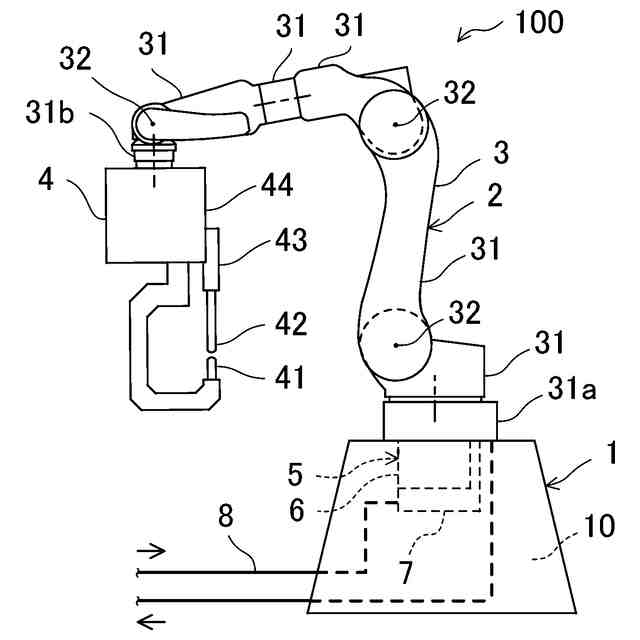
【解決手段】ロボット100は、ベース1と、ベース1に支持されたロボットアーム2と、ロボットアーム2を制御する制御ユニット5とを備える。制御ユニット5は、ロボットアーム2に熱的に接続されている。
【選択図】図1
特許請求の範囲
【請求項1】
ベースと、
前記ベースに支持されたロボットアームと、
前記ロボットアームを制御する制御ユニットとを備え、
前記制御ユニットは、前記ロボットアームに熱的に接続されたロボット。
続きを表示(約 880 文字)
【請求項2】
請求項1に記載のロボットにおいて、
前記制御ユニットは、前記ロボットアームにおける前記ベース側の端部に取り付けられることによって、前記ロボットアームに熱的に接続されたロボット。
【請求項3】
請求項2に記載のロボットにおいて、
前記ベースの内部に収容空間が形成され、
前記ロボットアームの前記端部は、前記収容空間に露出した露出部分を含み、
前記制御ユニットは、前記収容空間に収容された状態で前記露出部分に取り付けられたロボット。
【請求項4】
請求項1乃至3のいずれか1つに記載のロボットにおいて、
前記制御ユニットは、発熱部品を有し、
前記発熱部品は、前記ロボットアームに熱的に接続されたロボット。
【請求項5】
請求項4に記載のロボットにおいて、
前記制御ユニットは、前記発熱部品に熱的に接続された放熱器をさらに有したロボット。
【請求項6】
請求項1乃至5のいずれか1つに記載のロボットにおいて、
媒体を流通させる媒体流路をさらに備え、
前記ロボットアームは、前記ベースに連結されたアーム本体と、前記アーム本体に連結されたエンドエフェクタとを有し、
前記媒体流路は、前記エンドエフェクタと前記制御ユニットとを冷却する媒体を流通させるロボット。
【請求項7】
請求項6に記載のロボットにおいて、
前記アーム本体は、互いに回転可能に連結された複数のリンクと、複数のリンクを駆動する駆動部とを有し、
前記媒体流路は、前記エンドエフェクタと前記駆動部と前記制御ユニットとを冷却する媒体を流通させるロボット。
【請求項8】
請求項1又は請求項2に記載のロボットにおいて、
上下方向に延びる空気流路を備え、
前記制御ユニットは、発熱部品と前記発熱部品に熱的に接続された放熱器とを有し、
前記放熱器は、前記空気流路に露出したロボット。
発明の詳細な説明
【技術分野】
【0001】
ここに開示された技術は、ロボットに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
特許文献1には、ロボットが開示されている。ロボットは、ロボットアームと、ロボットアームを制御する制御ユニットとを備えている。制御ユニットには、制御ユニットを冷却するための排気ファンと、制御ユニットを冷却するための媒体を流通させる媒体流路とが設けられている。
【先行技術文献】
【特許文献】
【0003】
特開2018-126840号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、制御ユニットの発熱量が大きい場合には、制御ユニットの温度上昇を抑えるため、例えば、送風量の大きい排気ファン又は表面積の大きなヒートシンク等を用いたり、媒体流路を流れる媒体の流量を増加させたりする必要がある。しかし、この場合、ロボットの大型化又は構造の複雑化を招く要因になる。
【0005】
ここに開示された技術は、かかる点に鑑みてなされたものであり、その目的とするところは、ロボットの大型化及び構造の複雑化を軽減しつつ、制御ユニットの温度上昇を適切に軽減することにある。
【課題を解決するための手段】
【0006】
ここに開示されたロボットは、ベースと、前記ベースに支持されたロボットアームと、前記ロボットアームを制御する制御ユニットとを備え、前記制御ユニットは、前記ロボットアームに熱的に接続される。
【発明の効果】
【0007】
ここに開示されたロボットは、大型化及び構造の複雑化を軽減しつつ、制御ユニットの温度上昇を適切に軽減することができる。
【図面の簡単な説明】
【0008】
図1は、ロボットを示した模式図である。
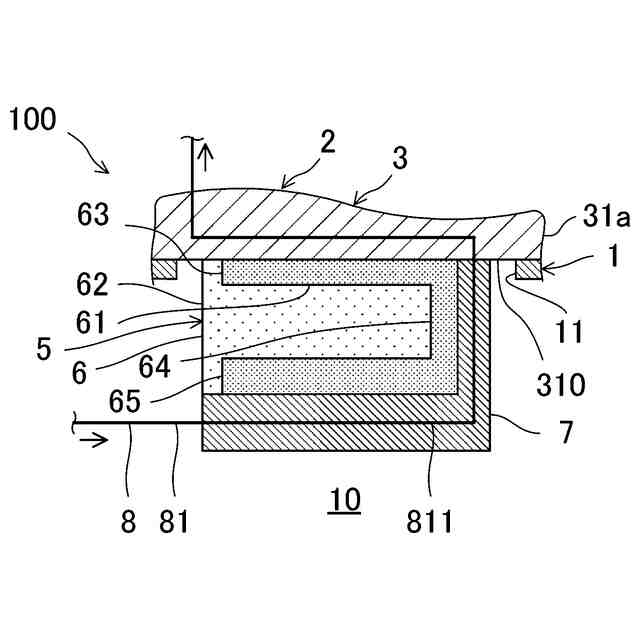
図2は、制御ユニットを概略的に示した断面図である。
図3は、媒体流路を示した模式図である。
図4は、変形例1の制御ユニットを概略的に示した断面図である。
図5は、変形例2のベース及び制御ユニットを概略的に示した斜視図である。
図6は、変形例2のベース及び制御ユニットを概略的に示した断面図である。
図7は、図6のVII-VII線における放熱器の断面図である。
【発明を実施するための形態】
【0009】
以下、例示的な実施形態を図面に基づいて詳細に説明する。図1は、ロボット100を示した模式図である。この例のロボット100は、産業用ロボットである。詳しくは、ロボット100は、対象物を溶接する溶接ロボットである。
【0010】
ロボット100は、ベース1と、ベース1に支持されたロボットアーム2と、ロボットアーム2を制御する制御ユニット5とを備えている。ロボット100は、ロボットアーム2及び制御ユニット5を冷却するための媒体を流通させる媒体流路8をさらに備えてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
5か月前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
28日前
個人
ペットボトル用蓋開け具。
6か月前
株式会社ツノダ
挟持工具
2か月前
株式会社ツノダ
挟持工具
1か月前
UTM株式会社
搬送装置
5か月前
川崎重工業株式会社
ハンド
2か月前
株式会社右川ゴム製造所
把持装置
1か月前
個人
ロボットシステム
4か月前
学校法人立命館
ロボットハンド
2か月前
株式会社不二越
ロボット
6か月前
トヨタ自動車株式会社
関節機構
5か月前
学校法人立命館
グリッパ
1か月前
トヨタ自動車株式会社
関節機構
4か月前
株式会社不二越
ロボット
4か月前
個人
作業台
5か月前
個人
プーリーキー抜き治具
1か月前
株式会社不二越
予測システム
2か月前
東京都公立大学法人
ロボットハンド
2日前
CKD株式会社
電動把持装置
7日前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社共和製作所
ロボット用アーム
15日前
株式会社ダイヘン
画像生成装置
1か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
3か月前
個人
スロープバリビス-ビス&-ドライバー
今日
工機ホールディングス株式会社
作業機
3か月前
株式会社ダイヘン
情報処理装置
1か月前
株式会社越智工業所
ブレーカ用カバー
4か月前
工機ホールディングス株式会社
作業機
3か月前
株式会社ダイヘン
画像生成装置
1か月前
工機ホールディングス株式会社
作業機
2か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ


































