TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024003536
公報種別
公開特許公報(A)
公開日
2024-01-15
出願番号
2022102741
出願日
2022-06-27
発明の名称
ピッキング装置
出願人
ヤマハ発動機株式会社
代理人
個人
,
個人
主分類
B25J
15/08 20060101AFI20240105BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】同一のハンドにより部品と部品トレイとを保持することが可能なピッキング装置を提供する。
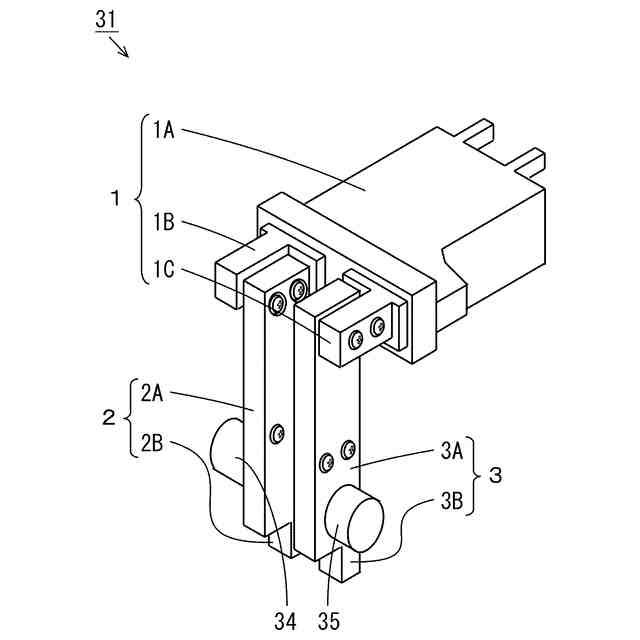
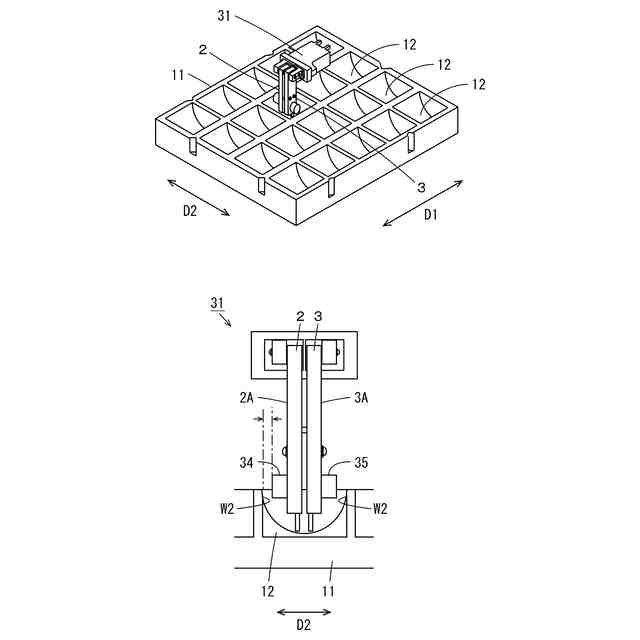
【解決手段】ピッキング装置は、ハンド31、パッド34,35および制御部を有する。ハンド31は、互いに対向するフィンガ2,3を有する。パッド34は、フィンガ2において、フィンガ3に対向する部分とは反対の部分に取り付けられる。パッド35は、フィンガ3において、フィンガ2に対向する部分とは反対の部分に取り付けられる。制御部は、部品の保持動作時に、フィンガ2とフィンガ3とを近接させ、複数のポケットが形成されたトレイの保持動作時に、フィンガ2とフィンガ3とを離間させる。
【選択図】図2
特許請求の範囲
【請求項1】
互いに対向する第1のフィンガおよび第2のフィンガを有するハンドと、
前記第1のフィンガにおいて、前記第2のフィンガに対向する部分とは反対の部分に取り付けられる第1のパッドと、
前記第2のフィンガにおいて、前記第1のフィンガに対向する部分とは反対の部分に取り付けられる第2のパッドと、
部品の保持動作時に、前記第1のフィンガと前記第2のフィンガとを近接させ、複数のポケットが形成されたトレイの保持動作時に、前記第1のフィンガと前記第2のフィンガとを離間させる制御部とを備える、ピッキング装置。
続きを表示(約 730 文字)
【請求項2】
前記第1のフィンガは、前記部品を保持する第1の先端部と、前記第1の先端部よりも幅広に形成され、前記第1のパッドを介して前記トレイを保持する第1の基端部とを含み、
前記第2のフィンガは、前記部品を保持する第2の先端部と、前記第2の先端部よりも幅広に形成され、前記第2のパッドを介して前記トレイを保持する第2の基端部とを含む、請求項1記載のピッキング装置。
【請求項3】
前記第1のパッドまたは前記第2のパッドは、ゴム部材により形成される、請求項1または2記載のピッキング装置。
【請求項4】
前記ゴム部材は、ウレタン、ニトリルゴムまたはシリコーンを含む、請求項3記載のピッキング装置。
【請求項5】
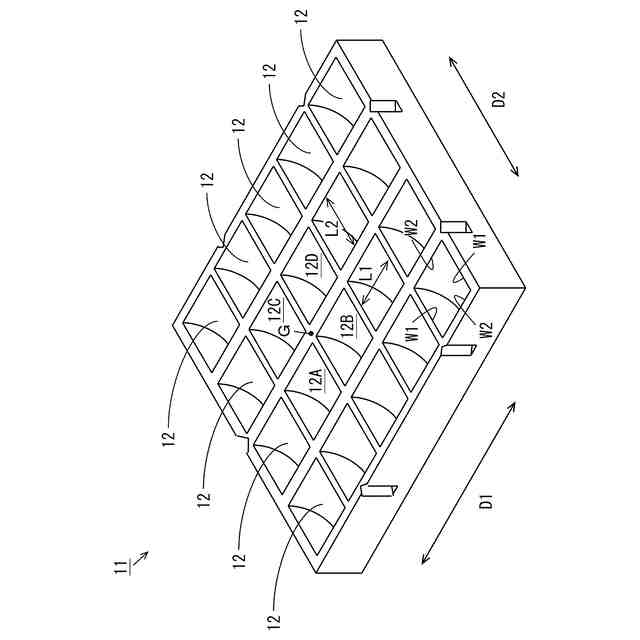
前記トレイの各ポケットは、第1の方向に第1の距離だけ離間した第1の対の壁面部と、第2の方向に前記第1の距離よりも大きい第2の距離だけ離間した第2の対の壁面部とにより形成され、
前記制御部は、前記トレイの保持動作時に、
前記第2の方向に並ぶ状態で、前記第1のフィンガおよび前記第2のフィンガを前記トレイの特定のポケットに進入させる制御と、
前記第1の方向に並ぶように前記第1のフィンガおよび前記第2のフィンガを回転させる制御と、
前記第1のフィンガと前記第2のフィンガとを離間させる制御とを順次実行する、請求項1または2記載のピッキング装置。
【請求項6】
前記制御部は、前記トレイの保持動作時に、前記トレイの重心から所定範囲内に位置するポケットに前記第1のフィンガおよび前記第2のフィンガを進入させる、請求項1または2記載のピッキング装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、製品の部品をピッキングするピッキング装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
工場における製品の組立工程では、複数の部品から各部品を取り出し、所定の作業位置に供給する仕分け作業が行われる。組立作業者がこのような仕分け作業を行うと、組立作業者の負担が大きくなるとともに、高い付加価値を有する他の作業に費やすための時間が削減される。そのため、近年、仕分け作業を自動的に行うピッキング装置が開発されている。
【先行技術文献】
【特許文献】
【0003】
特開平11-300670号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
例えば、特許文献1に記載された物品ピックアップ装置においては、トレイ上に配置されたボルト群が撮影されることにより、ボルト群の画像が取り込まれる。取り込まれた画像に基づいて、他のボルトとの重なりがない孤立ボルトが探索される。孤立ボルトは、ロボットのハンドにより把持され、所定の位置に移送される。孤立ボルトが探索できないときには、トレイが振動されることにより、ボルト群の重なり状態がほぐされる。
【0005】
複数の部品から製品の組立に必要な部品を必要な数だけ取り出し、部品トレイの所定のポケットに仕分けを行うことがある。この場合、仕分け先となる複数の部品トレイを順次搬入する必要がある。そこで、ロボットのハンドを用いて部品トレイを搬入することが考えられる。しかしながら、部品トレイの剛性は比較的小さいため、ハンドが部品の保持するときと同じ動作で部品トレイを保持しようとすると、部品トレイが破損する。そのため、同一のハンドにより部品と部品トレイとを保持することは容易ではない。
【0006】
本発明の目的は、同一のハンドにより部品と部品トレイとを保持することが可能なピッキング装置を提供することである。
【課題を解決するための手段】
【0007】
本発明の一局面に従うピッキング装置は、互いに対向する第1のフィンガおよび第2のフィンガを有するハンドと、前記第1のフィンガにおいて、前記第2のフィンガに対向する部分とは反対の部分に取り付けられる第1のパッドと、前記第2のフィンガにおいて、前記第1のフィンガに対向する部分とは反対の部分に取り付けられる第2のパッドと、部品の保持動作時に、前記第1のフィンガと前記第2のフィンガとを近接させ、複数のポケットが形成されたトレイの保持動作時に、前記第1のフィンガと前記第2のフィンガとを離間させる制御部とを備える。
【発明の効果】
【0008】
本発明によれば、同一のハンドにより部品と部品トレイとを保持することが可能になる。
【図面の簡単な説明】
【0009】
本発明の一実施の形態に係るピッキング装置の模式的外観斜視図である。
ハンドの構成を示す斜視図である。
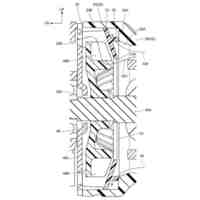
図2のハンドの端面図である。
保持対称の部品の一例を示す斜視図である。
保持対称の部品の他の例を示す斜視図である。
トレイの一例を示す斜視図である。
トレイの保持動作の一例を説明するための図である。
トレイの保持動作の一例を説明するための図である。
トレイの保持動作の他の例を説明するための図である。
トレイの保持動作の他の例を説明するための図である。
図1の制御部により実行されるピッキング処理の一例を示すフローチャートである。
図1の制御部により実行されるピッキング処理の一例を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の一実施の形態に係るピッキング装置について図面を参照しつつ説明する。以下に説明するピッキング装置は、基本的に共通の形状を有する複数の部品から各部品を取り出し、予め定められたトレイに収容するために用いられる。予め定められたトレイは、例えば樹脂により形成され、複数のポケットを含む。なお、以下の説明に用いられる部品とは、実施の形態に係るピッキング装置により保持されることになる部品および保持された部品のいずれかを意味する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
6か月前
個人
ねじ締め装置
5か月前
日東精工株式会社
搬送装置
1か月前
株式会社ツノダ
挟持工具
2か月前
株式会社ツノダ
挟持工具
1か月前
UTM株式会社
搬送装置
5か月前
株式会社右川ゴム製造所
把持装置
1か月前
川崎重工業株式会社
ハンド
3か月前
個人
ロボットシステム
5か月前
学校法人立命館
ロボットハンド
2か月前
トヨタ自動車株式会社
関節機構
5か月前
学校法人立命館
グリッパ
2か月前
株式会社不二越
ロボット
4か月前
トヨタ自動車株式会社
関節機構
5か月前
個人
作業台
5か月前
個人
プーリーキー抜き治具
2か月前
東京都公立大学法人
ロボットハンド
9日前
株式会社不二越
予測システム
3か月前
CKD株式会社
電動把持装置
14日前
工機ホールディングス株式会社
作業機
2日前
株式会社ダイヘン
情報処理装置
1か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
4か月前
株式会社越智工業所
ブレーカ用カバー
4か月前
株式会社共和製作所
ロボット用アーム
22日前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
5か月前
国立大学法人東北大学
剛性可変連結体
5か月前
工機ホールディングス株式会社
作業機
5か月前
小倉クラッチ株式会社
ロボットハンド
4か月前
工機ホールディングス株式会社
作業機
3か月前
株式会社ダイヘン
画像生成装置
1か月前
工機ホールディングス株式会社
作業機
3か月前
株式会社ダイヘン
画像生成装置
1か月前
工機ホールディングス株式会社
作業機
2か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ