TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024061423
公報種別
公開特許公報(A)
公開日
2024-05-07
出願番号
2022169362
出願日
2022-10-21
発明の名称
制御システムおよび制御方法
出願人
日本精工株式会社
代理人
個人
,
個人
主分類
G05B
11/36 20060101AFI20240425BHJP(制御;調整)
要約
【課題】通信遅延および外乱が生じる場合にも安定な制御を実現する。
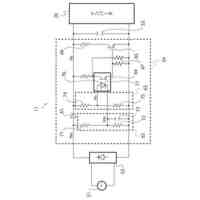
【解決手段】制御システムは、通信網を介して制御対象側へと制御指令値を送り、当該制御対象における制御結果が当該通信網経由で反映されてフィードバック制御を行う制御部と、上記通信網の上記制御部側に設けられ、上記通信網における通信遅延を補償するスミス予測器と、上記通信網の上記制御対象側に設けられ、当該制御対象に対する外乱と当該制御対象のパラメータ誤差とを補償する拡張カルマンフィルタと、を備える。
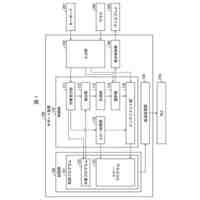
【選択図】 図3
特許請求の範囲
【請求項1】
通信網を介して制御対象側へと制御指令値を送り、当該制御対象における制御結果が当該通信網経由で反映されてフィードバック制御を行う第1制御部と、
前記通信網の前記制御部側に設けられ、前記通信網における通信遅延を補償するスミス予測器と、
前記通信網の前記制御対象側に設けられ、当該制御対象に対する外乱と当該制御対象のパラメータ誤差とを補償する拡張カルマンフィルタと、
を備える制御システム。
続きを表示(約 570 文字)
【請求項2】
前記第1制御部は、前記制御対象の制御目標に対する前記制御結果の偏差を減らすようにフィードバック制御を行う請求項1記載の制御システム。
【請求項3】
前記制御目標および前記制御結果として、位置、角度、力およびトルクの少なくとも1つが用いられる請求項2記載の制御システム。
【請求項4】
前記第1制御部は、前記制御指令値として、トルク、力、電流および電圧の少なくとも1つを示す指令値を前記制御対象に入力する請求項3記載の制御システム。
【請求項5】
前記通信網の前記制御対象側に設けられ、前記制御指令値に前記制御対象を追従させ、前記拡張カルマンフィルタによる補償が反映される第2制御部を備える請求項1記載の制御システム。
【請求項6】
通信網を介して制御対象側へと制御指令値を送り、当該制御対象における制御結果が当該通信網経由で反映されてフィードバック制御を行うステップと、
前記通信網における通信遅延を、前記通信網の前記制御部側に設けられたスミス予測器で補償するステップと、
前記制御対象に対する外乱と当該制御対象のパラメータ誤差とを前記通信網の当該制御対象側に設けられた拡張カルマンフィルタで補償するステップと、
を有する制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御システムおよび制御方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、種々の分野において、通信網などを介して遠隔の制御対象の動作を制御する制御システムが知られている。
例えば、超高齢化社会による労働者不足の解決策として、完全自動化や遠隔操作が提案されているが、全ての課題に対して完全自動化は難しく、自動化に不具合が生じた場合はバックアップとして遠隔操作が求められる。また、完全自動化は自動運転のように、センサ、コントローラ、アクチュエータ等を全て冗長化させないといけないので、高額になってしまう。このため、通信網などを介する動作制御が強く求められる。
通信網では通信遅延が生じるため、通信網などを介する動作制御においては、通信遅延に伴い制御が不安定化する虞がある。即ち、操作側における操作者やコントローラによる操作指令に対して遠隔側の装置などにおける動作が遅れるため、操作側で過剰な操作をしてしまうなど、意図した動作を得るための操作が困難となる。このため、通信遅延に対応する技術が求められる。
例えば特許文献1には、適応スミス予測器で通信遅延を補償する制御システムが提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-9740号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の技術では、通信遅延の正確な測定が必要であり、制御対象のモデルに実際の制御対象との誤差が生じたり、制御対象に外乱が加わったりした場合にも、制御が不安定化する虞がある。
そこで、本発明は、通信遅延および外乱が生じる場合にも安定な制御を実現することを課題とする。
【課題を解決するための手段】
【0005】
上記課題を解決するために、本発明に係る制御システムの一態様は、通信網を介して制御対象側へと制御指令値を送り、当該制御対象における制御結果が当該通信網経由で反映されてフィードバック制御を行う第1制御部と、上記通信網の上記制御部側に設けられ、上記通信網における通信遅延を補償するスミス予測器と、上記通信網の上記制御対象側に設けられ、当該制御対象に対する外乱と当該制御対象のパラメータ誤差とを補償する拡張カルマンフィルタと、を備える。
【0006】
このような制御システムによれば、スミス予測器による補償と拡張カルマンフィルタによる補償との協働により、通信遅延および外乱が生じる場合にも安定なフィードバック制御が実現される。さらに、制御対象のパラメータ誤差が生じた場合にも安定なフィードバック制御が実現される。
【0007】
上記制御システムにおいて、上記第1制御部は、上記制御対象の制御目標に対する上記制御結果の偏差を減らすようにフィードバック制御を行うことが好ましい。偏差を減らすフィードバック制御により、制御対象における動作などが制御目標に近づく。
また、上記制御システムは、上記制御目標および上記制御結果として、位置、角度、力およびトルクの少なくとも1つが用いられることが好ましい。位置、角度、力およびトルクは、制御対象の動作などで実用上求められる制御量であり、制御目標などに適している。
【0008】
また、上記制御システムにおいて、上記第1制御部は、上記制御指令値として、トルク、力、電流および電圧の少なくとも1つを示す指令値を上記制御対象に入力することが好ましい。トルク、力、電流および電圧は、位置、角度などの制御量を制御する場合も含めて制御の基本要素となるので制御指令値として適している。
【0009】
また、上記制御システムは、上記通信網の上記制御対象側に設けられ、上記制御指令値に上記制御対象を追従させ、上記拡張カルマンフィルタによる補償が反映される第2制御部を備えることが好ましい。通信網の制御対象側に第2制御部が備えられることで、拡張カルマンフィルタによる補償の反映が容易となる。
【0010】
上記課題を解決するために、本発明に係る制御方法の一態様は、通信網を介して制御対象側へと制御指令値を送り、当該制御対象における制御結果が当該通信網経由で反映されてフィードバック制御を行うステップと、上記通信網における通信遅延を、上記通信網の上記制御部側に設けられたスミス予測器で補償するステップと、上記制御対象に対する外乱と当該制御対象のパラメータ誤差とを上記通信網の当該制御対象側に設けられた拡張カルマンフィルタで補償するステップと、を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精工株式会社
軸受装置
5日前
日本精工株式会社
駆動装置
24日前
日本精工株式会社
リニアガイド装置
5日前
日本精工株式会社
ハブユニット軸受
15日前
日本精工株式会社
車両用アクチュエータ
24日前
日本精工株式会社
車両用アクチュエータ
24日前
日本精工株式会社
車両用アクチュエータ
24日前
日本精工株式会社
ボールねじ及び工作機械
25日前
日本精工株式会社
スライダ、及び直動案内装置
9日前
日本精工株式会社
転動体保持器、リニアガイド
15日前
日本精工株式会社
ボールねじ及びブレーキ装置
4日前
日本精工株式会社
軸受装置及び潤滑剤状態検出方法
11日前
日本精工株式会社
ウォームホイール及びその製造方法
1か月前
日本精工株式会社
ハブユニット軸受及び、ハブ輪の製造方法
17日前
日本精工株式会社
電動駆動装置及び電動パワーステアリング装置
1か月前
日本精工株式会社
検出回路、放電回路、制御装置およびモータシステム
15日前
日本精工株式会社
ステアリング装置、および、ハウジングとフレームとの結合構造
25日前
日本精工株式会社
細胞注入装置、及び外来細胞を内包するオルガノイドの作成方法
26日前
日本精工株式会社
電動パワーステアリング装置および電動パワーステアリング装置の製造方法
2日前
日本精工株式会社
転動装置における水素発生量予測方法、これに用いられる水素発生試験装置、及び、転動装置における白色組織剥離の可能性評価方法
29日前
エイブリック株式会社
基準電流源
12日前
株式会社クボタ
作業車
1か月前
株式会社エクセディ
作業ロボット
1か月前
アズビル株式会社
流量制御システム
1か月前
トヨタ自動車株式会社
自動作業装置
1か月前
オムロン株式会社
開発装置、開発方法
1か月前
株式会社ダイフク
搬送設備
1か月前
三菱電機株式会社
移動体制御装置
1か月前
株式会社ダイフク
物品搬送設備
1か月前
岩田工機株式会社
加工装置
1か月前
マキノジェイ株式会社
工作機械
11日前
村田機械株式会社
搬送車システム
1か月前
株式会社デンソー
過電流検出回路
1か月前
村田機械株式会社
無人搬送車システム
24日前
オムロン株式会社
サポート装置およびサポート方法
11日前
日置電機株式会社
信号出力装置および抵抗測定装置
1か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ