TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024059252
公報種別
公開特許公報(A)
公開日
2024-05-01
出願番号
2022166820
出願日
2022-10-18
発明の名称
移動体制御装置
出願人
三菱電機株式会社
代理人
個人
,
個人
主分類
G05D
1/43 20240101AFI20240423BHJP(制御;調整)
要約
【課題】移動体がローカルミニマムに陥ることを防止でき、且つ、周辺の状況変化への即応性の高い移動体制御装置を提供する。
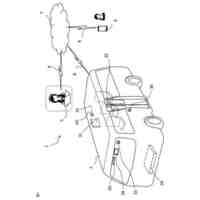
【解決手段】制御装置S5は、移動体E1が移動する空間を離散化して得られる複数のノードN1上に移動体E1の誘導方向を定めたポテンシャル場を生成する。制御装置S5は、ポテンシャル場の情報伝達速度をノードN1ごとに決定する情報伝達速度決定部C5と、移動体E1の周囲の観測情報に基づき、情報伝達速度に従ってポテンシャル場を更新するポテンシャル場更新部C4と、ポテンシャル場の勾配ベクトルに基づいて、移動体E1への指令値を計算する指令値計算部C3と、を備える。情報伝達速度決定部C5は、各ノードN1の情報伝達速度を、移動体E1の位置に応じて決定する。
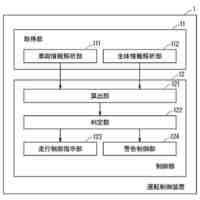
【選択図】図1
特許請求の範囲
【請求項1】
移動体が移動する空間を離散化して得られる複数のノード上に前記移動体の誘導方向を定めたポテンシャル場を生成する移動体制御装置であって、
前記ポテンシャル場の情報伝達速度を前記ノードごとに決定する情報伝達速度決定部と、
前記移動体の周囲の観測情報に基づき、前記情報伝達速度に従って前記ポテンシャル場を更新するポテンシャル場更新部と、
前記ポテンシャル場の勾配ベクトルに基づいて、前記移動体への指令値を計算する指令値計算部と、
を備え、
前記情報伝達速度決定部は、各前記ノードの前記情報伝達速度を、前記移動体の位置に応じて決定する、
移動体制御装置。
続きを表示(約 1,200 文字)
【請求項2】
移動体が移動する空間を離散化して得られる複数のノード上に前記移動体の誘導方向を定めたポテンシャル場を生成する移動体制御装置であって、
前記ポテンシャル場の情報伝達速度を前記ノードごとに決定する情報伝達速度決定部と、
前記移動体の周囲の観測情報に基づき、前記情報伝達速度に従って前記ポテンシャル場を更新するポテンシャル場更新部と、
前記ポテンシャル場の勾配ベクトルに基づいて、前記移動体への指令値を計算する指令値計算部と、
を備え、
前記情報伝達速度決定部は、各前記ノードにおける前記ポテンシャル場の更新量に基づいて、各前記ノードの前記情報伝達速度を決定する、
移動体制御装置。
【請求項3】
移動体が移動する空間を離散化して得られる複数のノード上に前記移動体の誘導方向を定めたポテンシャル場を生成する移動体制御装置であって、
前記ポテンシャル場の情報伝達速度を前記ノードごとに決定する情報伝達速度決定部と、
前記移動体の周囲の観測情報に基づき、前記情報伝達速度に従って前記ポテンシャル場を更新するポテンシャル場更新部と、
前記ポテンシャル場の勾配ベクトルに基づいて、前記移動体への指令値を計算する指令値計算部と、
を備え、
前記情報伝達速度決定部は、各前記ノードにおける環境変化のタイミングに基づいて、各前記ノードの前記情報伝達速度を決定する、
移動体制御装置。
【請求項4】
前記ポテンシャル場更新部は、空間内部に重みを与えることのできる微分方程式に基づき、前記移動体の周囲の前記観測情報から計算された斥力関数と前記移動体の目的地への引力関数との和を前記微分方程式の前記重みとして与えることにより、前記ポテンシャル場を更新する、
請求項1から請求項3のいずれか一項に記載の移動体制御装置。
【請求項5】
前記情報伝達速度決定部は、前記移動体の位置を中心とした複数の領域を定義し、前記領域ごとに各前記ノードの前記情報伝達速度を決定する、
請求項1に記載の移動体制御装置。
【請求項6】
前記ポテンシャル場更新部は、特定の領域の境界に位置する前記ノードを初期ノードとした探索アルゴリズムにより、前記特定の領域内の各前記ノードの前記ポテンシャル場を更新する順番を決定する、
請求項1から請求項3のいずれか一項に記載の移動体制御装置。
【請求項7】
前記指令値計算部は、前記ポテンシャル場の勾配ベクトルから計算された前記移動体の指令値を初期値とし、前記ポテンシャル場に基づいて計算された前記指令値の評価値に基づいて前記指令値を修正する、
請求項1から請求項3のいずれか一項に記載の移動体制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動体の制御装置に関するものである。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
自律的に移動する移動体が目的地まで移動する場合、移動体は、予め保持した特定の空間を自身が通行可能かどうか判断するための環境地図と、移動しながら観測した周囲の障害物の位置と基づいて、障害物を回避しつつ現在地から目的地まで到達できる移動経路を生成し、その経路を追従して移動する。
【0003】
経路の生成方法としては、目的地に向かって単調減少する引力関数と、環境地図の移動不可な領域もしくは障害物に向かって単調増加する斥力関数との和から評価関数(ポテンシャル関数)を計算し、その評価関数に基づき経路を生成する方法が普及している。例えば、評価関数を重みとしたダイクストラ法によって経路を生成する方法や、下記の非特許文献1で提案されるように評価関数を最小化する経路を再急降下法で計算することによって経路を生成する方法などがある。後者の方法は人工ポテンシャル法とも呼ばれる。また、斥力関数のみを評価関数とする方法も存在する。
【0004】
人工ポテンシャル法においては、目的地に到達しない、ローカルミニマムと呼ばれる局所解が存在する場合がある。ローカルミニマムは、障害物同士の距離が近いために複数の斥力関数が重なる場合や、迂回が必要な環境(例えば迷路など)など、単調な引力関数で解くことが困難な場合に生じる。ローカルミニマムの発生を抑制する技術としては、例えば、極小点のないポテンシャル関数を評価関数に用いる方法がある。例えば、非特許文献2は、解が極小値を持たないことが証明されているラプラス方程式を用いる方法が提案されており、例えば下記特許文献1ではその方法によって経路を生成する技術が開示されている。
【0005】
また、下記の特許文献2には、狭小空間の斥力関数の勾配を大きくすることで、複数の斥力関数が重なることを抑制する技術が開示されている。
【先行技術文献】
【特許文献】
【0006】
特開平8-22324号公報
特開2018-185633号公報
特開2017-111473号公報
【非特許文献】
【0007】
Oussama Khatib, "Real-Time Obstacle Avoidance for Manipulators and Mobile Robots", Proceedings of the 1985 IEEE International Conference on Robotics & Automation, pp. 500-505, 1985.
佐藤圭祐,「極小点のないポテンシャル場を用いたロボットの動作計画」,日本ロボット学会誌,1993
【発明の概要】
【発明が解決しようとする課題】
【0008】
特許文献1の技術は、ラプラス方程式を用いたポテンシャル関数を評価関数とし、数値解の変化量が一定以下であることを終了条件として反復計算をすることで、移動体の誘導方向を定めるポテンシャル場を生成するものであるため、ポテンシャル場の生成に時間がかかる。よって、移動体の移動中における周辺の状況変化への対応が間に合わず、移動体が障害物へ衝突する恐れがあるため、この技術は動的な環境で使用することが困難であった。非特許文献2では、ラプラス方程式の解法にガウス・ザイデル法を用い、終了条件を満たさずとも極小値が生じない性質を利用し、反復回数を制限することで即応性を高めているが、移動空間の範囲が増大すると指数関数的に計算コストが増加することが分かっている。
【0009】
本開示は以上のような課題を解決するためになされたものであり、移動体がローカルミニマムに陥ることを防止でき、且つ、周辺の状況変化への即応性の高い移動体制御装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
本開示に係る移動体制御装置は、移動体が移動する空間を離散化して得られる複数のノード上に前記移動体の誘導方向を定めたポテンシャル場を生成する移動体制御装置であって、前記ポテンシャル場の情報伝達速度を前記ノードごとに決定する情報伝達速度決定部と、前記移動体の周囲の観測情報に基づき、前記情報伝達速度に従って前記ポテンシャル場を更新するポテンシャル場更新部と、前記ポテンシャル場の勾配ベクトルに基づいて、前記移動体への指令値を計算する指令値計算部と、を備え、前記情報伝達速度決定部は、各前記ノードの前記情報伝達速度を、前記移動体の位置に応じて決定する。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
冷却装置
5日前
三菱電機株式会社
表示装置
20日前
三菱電機株式会社
照明器具
7日前
三菱電機株式会社
静止誘導器
6日前
三菱電機株式会社
半導体装置
27日前
三菱電機株式会社
電気掃除機
8日前
三菱電機株式会社
半導体装置
1日前
三菱電機株式会社
電気掃除機
12日前
三菱電機株式会社
空調システム
13日前
三菱電機株式会社
電力変換装置
8日前
三菱電機株式会社
電力変換装置
9日前
三菱電機株式会社
電力変換装置
21日前
三菱電機株式会社
電力変換装置
20日前
三菱電機株式会社
電子制御装置
13日前
三菱電機株式会社
電力変換装置
13日前
三菱電機株式会社
無線センサ装置
7日前
三菱電機株式会社
移動体制御装置
21日前
三菱電機株式会社
半導体レーザ装置
9日前
三菱電機株式会社
自動運転システム
21日前
三菱電機株式会社
電力用半導体装置
12日前
三菱電機株式会社
車両追跡システム
1日前
三菱電機株式会社
回転電機の制御装置
20日前
三菱電機株式会社
ピックアップステージ
27日前
三菱電機株式会社
換気空気清浄システム
7日前
三菱電機株式会社
半導体装置、電力変換装置
27日前
三菱電機株式会社
スイッチング素子駆動回路
8日前
三菱電機株式会社
ガイドレールの位置調整装置
7日前
三菱電機株式会社
防犯灯システム及び点灯装置
15日前
三菱電機株式会社
冷蔵庫および冷蔵庫システム
6日前
三菱電機株式会社
半導体装置および電力変換装置
13日前
三菱電機株式会社
運転制御装置及び運転制御方法
27日前
三菱電機株式会社
半導体装置およびその製造方法
7日前
三菱電機株式会社
車両制御装置及び車両制御方法
5日前
三菱電機株式会社
電子膨張弁及び冷凍サイクル装置
8日前
三菱電機株式会社
付加製造装置および付加製造方法
15日前
三菱電機株式会社
攪拌板、攪拌装置および冷却装置
5日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ