TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024058344
公報種別
公開特許公報(A)
公開日
2024-04-25
出願番号
2022165638
出願日
2022-10-14
発明の名称
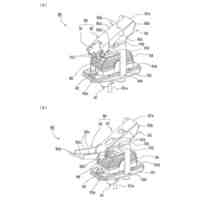
搬送車システム
出願人
村田機械株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20240418BHJP(制御;調整)
要約
【課題】搬送車が備える通信部における負荷を軽減することができる搬送車システムを提供する。
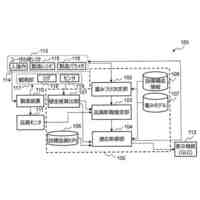
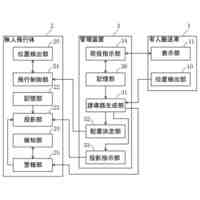
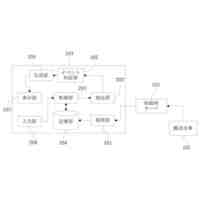
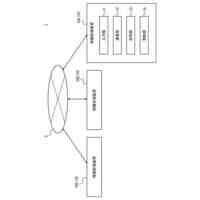
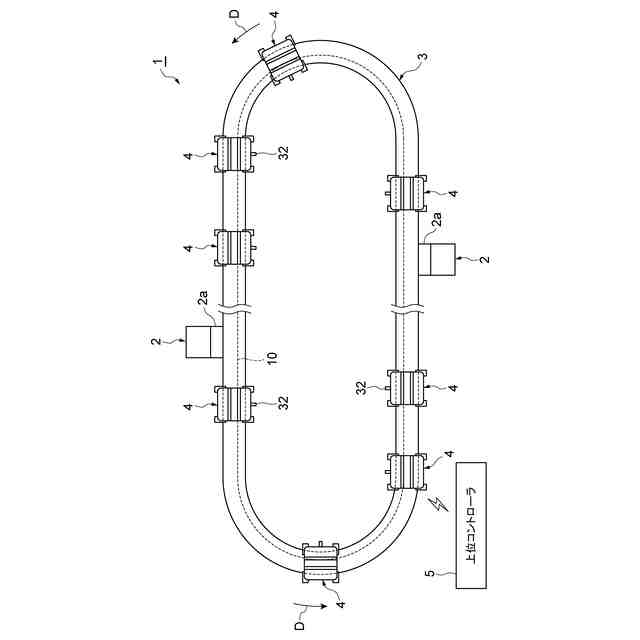
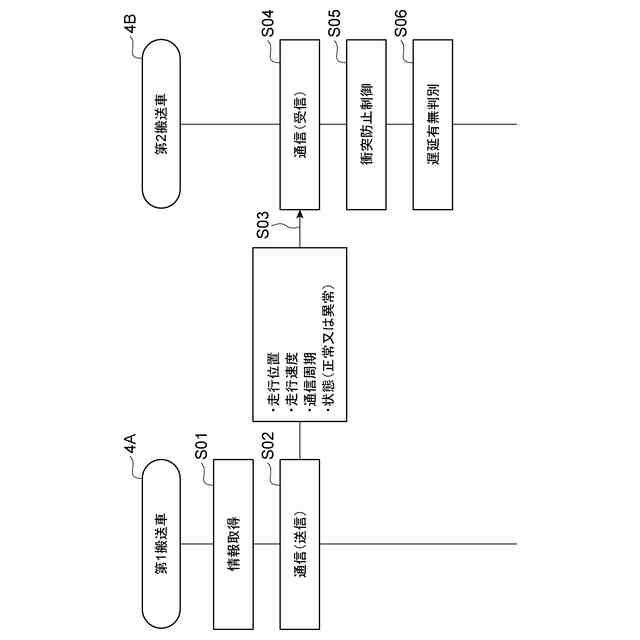
【解決手段】搬送車システム1において、各搬送車4は、自車の走行位置を取得する位置取得部21と、他の搬送車との間で走行位置を含む情報を通信する搬送車間通信部32と、搬送車間通信部32における通信周期を制御する通信制御部23と、を有する。通信制御部23は、自車が所定距離を走行するのに要する距離基準時間Tbか、予め決められた第1時間Taかの何れか短い方を通信周期として搬送車間通信部32による通信を実行する。自車の後方で最も近くに位置する他の搬送車は、受け取った情報に基づいて衝突防止制御を行う。
【選択図】図2
特許請求の範囲
【請求項1】
軌道に沿って走行方向に走行する複数の搬送車を備える搬送車システムであって、
前記搬送車のそれぞれは、
自車の走行位置を取得する位置取得部と、
他の搬送車との間で前記走行位置を含む情報を通信する搬送車間通信部と、
前記搬送車間通信部における通信周期を制御する通信制御部と、を有し、
前記通信制御部は、前記自車が所定距離を走行するのに要する距離基準時間か、予め決められた第1時間かの何れか短い方を前記通信周期として前記搬送車間通信部による通信を実行し、
前記自車の後方で最も近くに位置する他の搬送車は、受け取った前記情報に基づいて衝突防止制御を行う、搬送車システム。
続きを表示(約 530 文字)
【請求項2】
前記搬送車間通信部によって通信される前記情報は、前記通信周期を更に含み、
前記自車の後方で最も近くに位置する他の搬送車は、前記情報に基づいて通信の遅延の有無を判別する、請求項1に記載の搬送車システム。
【請求項3】
前記自車が停止している間、前記通信制御部は、前記第1時間よりも長い第2時間を前記通信周期として前記搬送車間通信部による通信を実行する、請求項1又は2に記載の搬送車システム。
【請求項4】
前記自車が停止した時、前記自車が走行を開始した時、及び前記自車に異常が発生した時、前記通信制御部は、前記通信周期の経過を待たずに前記搬送車間通信部による通信を実行する、請求項1又は2に記載の搬送車システム。
【請求項5】
前記所定距離は、前記搬送車のそれぞれにおける最高速度、及び、前記通信制御部を含む搬送車コントローラの演算能力に応じて決定される、請求項1又は2に記載の搬送車システム。
【請求項6】
前記第1時間は、前記搬送車のそれぞれにおける最高速度、及び、前記通信制御部を含む搬送車コントローラの演算能力に応じて決定される、請求項1又は2に記載の搬送車システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、搬送車システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
複数の走行車が、上位コントローラと通信しながら経路上を走行するシステムが知られている。例えば特許文献1に記載されたシステムでは、各走行車が、上位コントローラと通信するためのコントローラ間通信手段と、他の走行車と直接通信するための走行車間通信手段と、走行車間通信手段による通信の有無を把握する通信有無把握手段とを備えている。両方の通信手段を介して、ある走行車は、その前方を走行する他の走行車の位置情報を受け取る。何れかの通信手段を介して受け取られた位置情報が、衝突防止制御に用いられる。
【先行技術文献】
【特許文献】
【0003】
特開2008-171088号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記した従来のシステムでは、所定の通信周期で、走行車間通信手段による通信が行われる。ところが、所定の通信周期で位置情報等を送信し続けると、通信部(例えば上記の走行車間通信手段)における負荷が高くなってしまう。高い負荷は、通信遅延を引き起こす可能性がある。
【0005】
本発明は、搬送車が備える通信部における負荷を軽減することができる搬送車システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様は、軌道に沿って走行方向に走行する複数の搬送車を備える搬送車システムであって、搬送車のそれぞれは、自車の走行位置を取得する位置取得部と、他の搬送車との間で走行位置を含む情報を通信する搬送車間通信部と、搬送車間通信部における通信周期を制御する通信制御部と、を有し、通信制御部は、自車が所定距離を走行するのに要する距離基準時間か、予め決められた第1時間かの何れか短い方を通信周期として搬送車間通信部による通信を実行し、自車の後方で最も近くに位置する他の搬送車は、受け取った情報に基づいて衝突防止制御を行う。
【0007】
この搬送車システムによれば、走行中の搬送車(自車)が所定距離を走行するのに、第1時間以上を要する場合(搬送車が遅く走行する場合)には、当該搬送車の通信制御部は、第1時間を通信周期として搬送車間通信部による通信を実行する。一方で当該搬送車が第1時間未満で所定距離を走行する場合(搬送車が速く走行する場合)には、当該搬送車の通信制御部は、距離基準時間を通信周期として搬送車間通信部による通信を実行する。このような制御によれば、距離基準時間は第1時間よりも短い。従来は、各搬送車の最高速度に対応する一定周期で通信を実行していた(例えば上記特許文献1では30~100(msec))ので、搬送車間通信部における負荷が高かった。距離基準時間は搬送車の走行速度によって変化し得るが、実際にあり得る走行速度の範囲においては、距離基準時間を従来の一定周期よりも長くできる。したがって、この搬送車システムによれば、搬送車間通信部における負荷を軽減することができる。
【0008】
搬送車間通信部によって通信される情報は、上記の通信周期を更に含み、自車の後方で最も近くに位置する他の搬送車は、情報に基づいて通信の遅延の有無を判別してもよい。この場合、通信間隔が一定ではなくなった場合に、他の搬送車は、通信間隔が変化したのか又は通信遅延が生じているのかを判別することができる。
【0009】
自車が停止している間、通信制御部は、第1時間よりも長い第2時間を通信周期として搬送車間通信部による通信を実行してもよい。この場合、搬送車(自車)の停止中は、搬送車間通信部における負荷を更に軽減することができる。
【0010】
自車が停止した時、自車が走行を開始した時、及び自車に異常が発生した時、通信制御部は、通信周期の経過を待たずに搬送車間通信部による通信を実行してもよい。この場合、搬送車(自車)の周囲(前後)の他の搬送車に対して安全を確保できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
アズビル株式会社
流量制御装置
25日前
ミネベアミツミ株式会社
入力装置
16日前
株式会社エクセディ
作業ロボット
4日前
トヨタ自動車株式会社
自動走行搬送車
24日前
エイブリック株式会社
ボルテージレギュレータ
24日前
三菱電機株式会社
移動体制御装置
3日前
株式会社クボタ
故障診断装置
23日前
岩田工機株式会社
加工装置
3日前
リックス株式会社
状態検出装置
19日前
村田機械株式会社
搬送車システム
9日前
多摩川精機株式会社
突入電流防止回路
9日前
株式会社ディスコ
加工装置
9日前
株式会社日立製作所
設備診断装置及び設備診断方法
16日前
清水建設株式会社
自律移動ロボット
16日前
清水建設株式会社
自律移動ロボット
16日前
三菱ロジスネクスト株式会社
誘導システム
18日前
株式会社IHI
加工装置および加工方法
19日前
ニデック株式会社
ロット管理システム、ロット管理方法及び表示装置
23日前
サイレックス・テクノロジー株式会社
通信端末、および、走行状況表示方法
10日前
ローム株式会社
スレーブ回路およびそれを用いた遠隔制御システム
3日前
株式会社日立製作所
計画ロジック評価支援システムおよび方法
25日前
住友重機械工業株式会社
移動体の運転支援装置及び自動運転システム
16日前
株式会社アマダ
工作機械制御装置および工作機械制御方法
16日前
株式会社日立製作所
プラント制御システム及びプラント制御方法
2日前
パナソニックIPマネジメント株式会社
シミュレーションシステム
17日前
ヤンマーホールディングス株式会社
ペダル装置およびこれを備えた作業機械
10日前
株式会社スカイディスク
情報処理装置、情報処理方法、及びプログラム
9日前
株式会社アマダ
加工スケジュール調整システム及びその端末装置
10日前
株式会社フジキン
流量制御装置、気化供給装置および流量制御装置の製造方法
18日前
株式会社日立産機システム
コントロールシステム
25日前
株式会社アマダ
自動運転再開システム及びその端末装置と工作機械
10日前
ローム株式会社
状態検知装置、半導体集積回路装置、及び車両
23日前
日本特殊陶業株式会社
車載ソーラパネル用の電力制御装置
24日前
日本特殊陶業株式会社
車載ソーラパネル用の電力制御装置
24日前
株式会社日立製作所
運転支援装置及び運転支援方法
25日前
ラピステクノロジー株式会社
バイアス回路、電圧レギュレータ
23日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ