TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024055331
公報種別
公開特許公報(A)
公開日
2024-04-18
出願番号
2022162163
出願日
2022-10-07
発明の名称
自律移動ロボット
出願人
清水建設株式会社
代理人
弁理士法人YKI国際特許事務所
主分類
G05D
1/43 20240101AFI20240411BHJP(制御;調整)
要約
【課題】ユーザーの自然な動作に基づいて直感的に操作可能な自律走行ロボットを提供する。
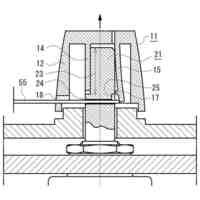
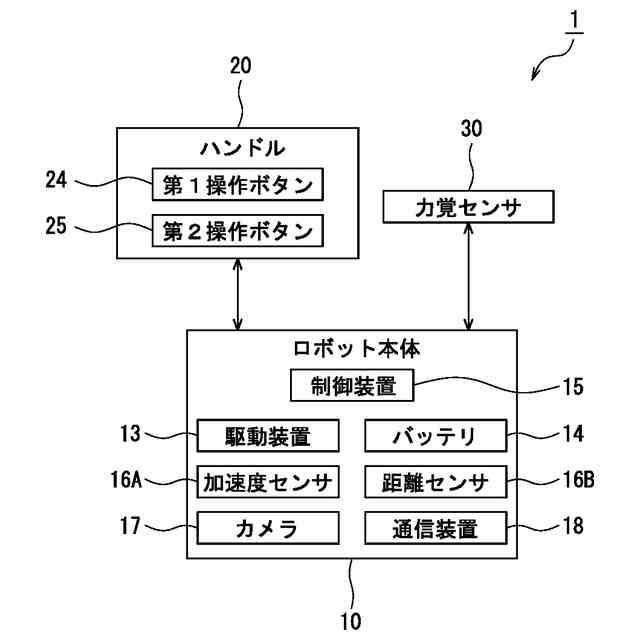
【解決手段】自律移動ロボット1は、ユーザーの移動を支援するロボットであって、自律走行機能を有するロボット本体10と、ロボット本体10に取り付けられ、ロボット本体10の高さ方向に延びたハンドル20と、ハンドル20に加わる力の大きさと方向を検出する力覚センサ30とを備える。また、自律移動ロボット1は、力覚センサ30の検出情報に基づいて、ロボット本体10の動作を制御する制御装置15を備える。力覚センサ30は、ハンドル20の付け根に設けられている。
【選択図】図5
特許請求の範囲
【請求項1】
ユーザーの移動を支援する自律移動ロボットであって、
自律走行機能を有するロボット本体と、
前記ロボット本体に取り付けられ、前記ロボット本体の高さ方向に延びたハンドルと、
前記ハンドルに加わる力の大きさと方向を検出するセンサと、
前記センサの検出情報に基づいて、前記ロボット本体の動作を制御する制御装置と、
を備え、
前記センサは、前記ハンドルの付け根に設けられている、自律移動ロボット。
続きを表示(約 500 文字)
【請求項2】
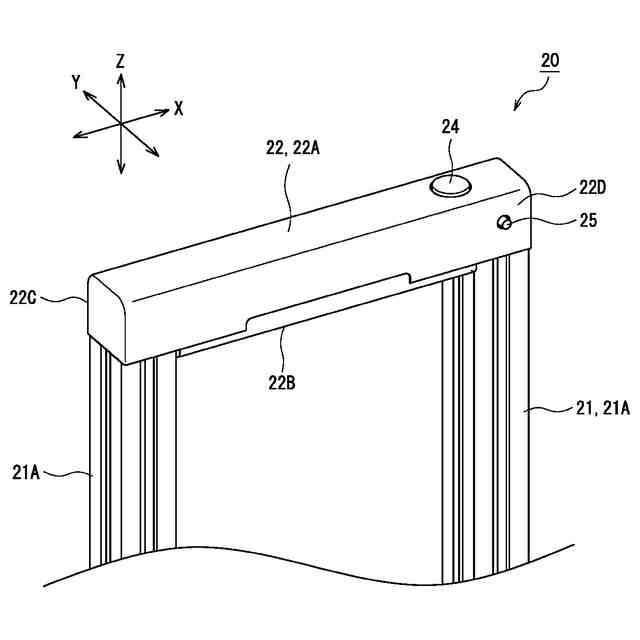
前記ハンドルは、前記ロボット本体の高さ方向に延びるアームと、前記アームの付け根が固定された取り付け板と、前記アームの先端側に設けられた把持部とを有し、
前記センサは、前記取り付け板の直下に配置されている、請求項1に記載の自律移動ロボット。
【請求項3】
前記アームは、前記ロボット本体の前後方向に間隔をあけて2本配置され、
前記把持部は、2本の前記アームにわたって設けられている、請求項2に記載の自律移動ロボット。
【請求項4】
前記センサは、少なくとも前記ロボット本体の前後方向および左右方向の力を検出可能に構成されている、請求項1~3のいずれか一項に記載の自律移動ロボット。
【請求項5】
前記制御装置は、前記センサの検出情報に基づいて、前記ロボット本体の走行に必要な情報を設定する、請求項4に記載の自律移動ロボット。
【請求項6】
前記ロボット本体の走行に必要な情報は、自律走行の目的地および前記ロボット本体の走行速度から選択される少なくとも1つである、請求項5に記載の自律移動ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律移動ロボットに関し、より詳しくは、ユーザーの移動を支援する自律移動ロボットに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
近年、ロボットに搭載されたセンサ等により周囲の環境を認識し、またロボット自身の位置情報を取得して、目的とする場所まで移動することが可能な自律移動ロボットが知られている。自律移動ロボットの一例として、視覚障害者等のユーザーを目的地まで誘導(案内)してユーザーの移動を支援するロボットも提案されている。例えば、特許文献1には、案内用ロボットと、案内用ロボットと別体に設けられたリモコンとを備える移動ロボットシステムが開示されている。
【0003】
特許文献1の案内用ロボットは、ユーザーにより把持されるグリップを含む操作入力部と、目的地を設定するためのタッチパネルとを備え、設定された目的地まで自律走行するように構成されている。また、特許文献2には、ユーザーの移動を支援するロボットであって、ロボット本体と、ロボット本体から延びるハンドルとを備えたスーツケース型の自律移動ロボットが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2017-97538号公報
特開2022-76648号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
移動支援用ロボットの一般的な使用形態としては、ユーザーがハンドル等の把持部を掴んでロボットと共に移動する形態が挙げられるが、その際、ユーザーの自然な動作に基づいて直感的にロボットを操作したいというニーズがある。即ち、ロボットに対するユーザーの動きを的確に検出し、当該検出情報をロボットの制御に活用することが求められる。従来の技術は、このような観点について未だ改良の余地が大きい。
【課題を解決するための手段】
【0006】
本発明に係る自律移動ロボットは、ユーザーの移動を支援する自律移動ロボットであって、自律走行機能を有するロボット本体と、ロボット本体に取り付けられ、ロボット本体の高さ方向に延びたハンドルと、ハンドルに加わる力の大きさと方向を検出するセンサと、センサの検出情報に基づいて、ロボット本体の動作を制御する制御装置とを備える。本発明に係る自律移動ロボットにおいて、センサは、ハンドルの付け根に設けられている。
【発明の効果】
【0007】
本発明に係る自律移動ロボットによれば、ユーザーの自然な動作に基づいて直感的にロボットを操作することが可能である。本発明に係る自律移動ロボットでは、ハンドルに加わる力を検出するセンサがハンドルの付け根に設けられているため、ユーザーのハンドル操作によりハンドルに作用する力を的確に検出できる。そして、当該検出情報を用いてロボットを制御することにより、例えば、ボタン、スイッチ、或いはジョイスティックなどを用いたロボット操作と比べて、より直感的なロボット操作が可能となる。
【図面の簡単な説明】
【0008】
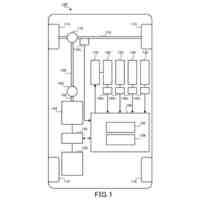
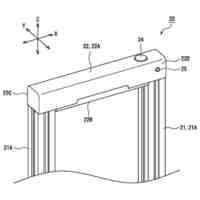
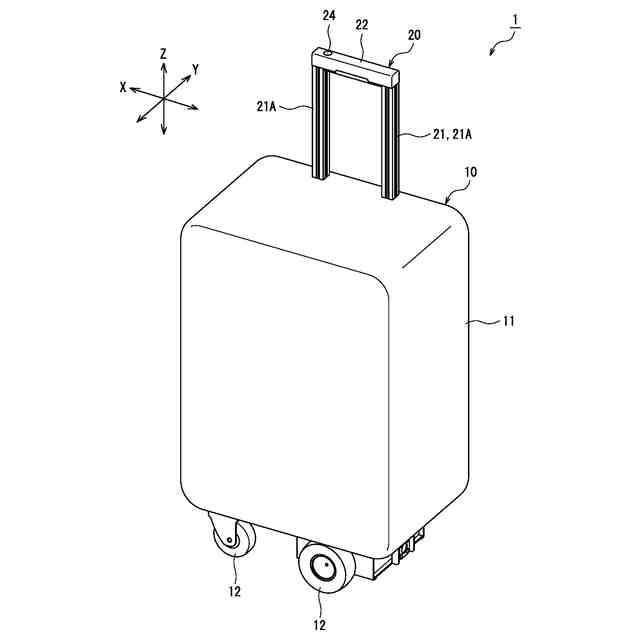
実施形態の一例である自律移動ロボットの斜視図である。
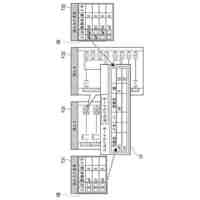
自律移動ロボットの概略構成を示すブロック図である。
自律移動ロボットのハンドルの先端部分を斜め上方から見た図である。
自律移動ロボットのハンドルの先端部分を斜め下方から見た図である。
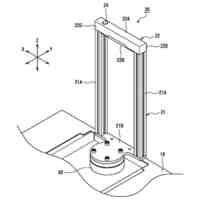
自律移動ロボットのハンドルの全体を示す斜視図である。
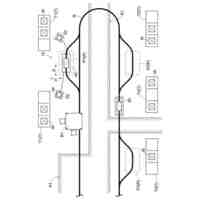
自律移動ロボットの使用方法を説明するための図である。
自律移動ロボットの制御手順の一例を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、図面を参照しながら、本発明に係る自律移動ロボットの実施形態について詳細に説明する。以下で説明する実施形態はあくまでも一例であって、本発明は以下の実施形態に限定されない。また、以下で説明する複数の実施形態および変形例の各構成要素を選択的に組み合わせてなる構成は本発明に含まれている。
【0010】
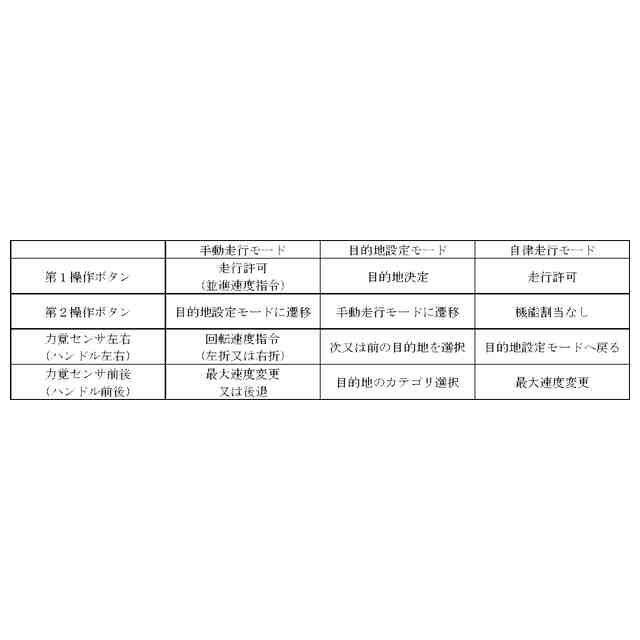
図1は、本発明の実施形態の一例である自律移動ロボット1の斜視図である。図1に示すように、自律移動ロボット1は、ロボット本体10と、ロボット本体10に取り付けられたハンドル20とを備える。自律移動ロボット1は、ユーザーの移動を支援するロボットであって、目的地までの経路に沿って磁気テープ等の誘導体を配置しなくても、搭載されたセンサ等により周囲の環境を認識して目的地まで移動することが可能である。ロボット本体10は、自律走行機能を有し、目的地に向かって自律走行する自律走行モード、および走行状態を手動で制御可能な手動走行モードで走行可能に構成されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
アズビル株式会社
流量制御装置
28日前
株式会社エクセディ
作業ロボット
7日前
ミネベアミツミ株式会社
入力装置
19日前
トヨタ自動車株式会社
自動走行搬送車
27日前
エイブリック株式会社
ボルテージレギュレータ
27日前
三菱電機株式会社
移動体制御装置
6日前
株式会社クボタ
故障診断装置
26日前
岩田工機株式会社
加工装置
6日前
リックス株式会社
状態検出装置
22日前
株式会社デンソー
制御装置
1か月前
株式会社デンソー
制御装置
1か月前
村田機械株式会社
搬送車システム
12日前
株式会社オリジン
電源装置
1か月前
株式会社オリジン
電源装置
1か月前
株式会社GSユアサ
電力変換装置
1か月前
THK株式会社
編集装置及び編集方法
1か月前
川崎重工業株式会社
要因分析装置及び要因分析方法
1か月前
THK株式会社
編集装置及び編集方法
1か月前
東洋電装株式会社
移動検出装置および鞍乗車両
1か月前
国立大学法人 名古屋工業大学
パラメータ探索空間算出方法
1か月前
株式会社ディスコ
加工装置
1か月前
村田機械株式会社
走行車システム
1か月前
株式会社デンソー
ペダル装置
1か月前
多摩川精機株式会社
突入電流防止回路
12日前
株式会社ダイフク
無人航空機の搬送システム
1か月前
八重洲無線株式会社
回動つまみの回動軸への取り付け機構
1か月前
株式会社ディスコ
加工装置
12日前
株式会社SUBARU
電気自動車
1か月前
THK株式会社
変数の突合方法及びプログラム
1か月前
株式会社東芝
データ処理装置及びガス変換システム
1か月前
株式会社日立製作所
設備診断装置及び設備診断方法
19日前
セイコーエプソン株式会社
生産ライン設計支援装置
1か月前
清水建設株式会社
自律移動ロボット
19日前
清水建設株式会社
自律移動ロボット
19日前
トヨタ自動車株式会社
検査管理システム
1か月前
株式会社IHI
加工装置および加工方法
22日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ