TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024055330
公報種別
公開特許公報(A)
公開日
2024-04-18
出願番号
2022162162
出願日
2022-10-07
発明の名称
自律移動ロボット
出願人
清水建設株式会社
代理人
弁理士法人YKI国際特許事務所
主分類
G05D
1/43 20240101AFI20240411BHJP(制御;調整)
要約
【課題】良好な操作性を確保しつつ、誤操作を抑制する。
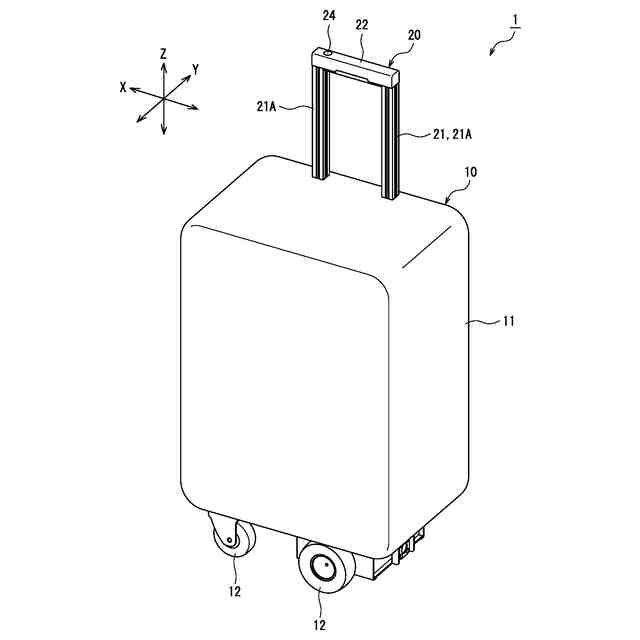
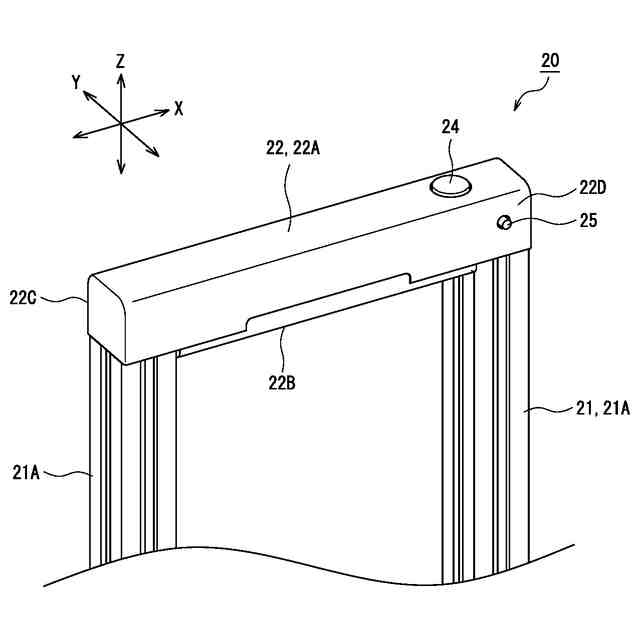
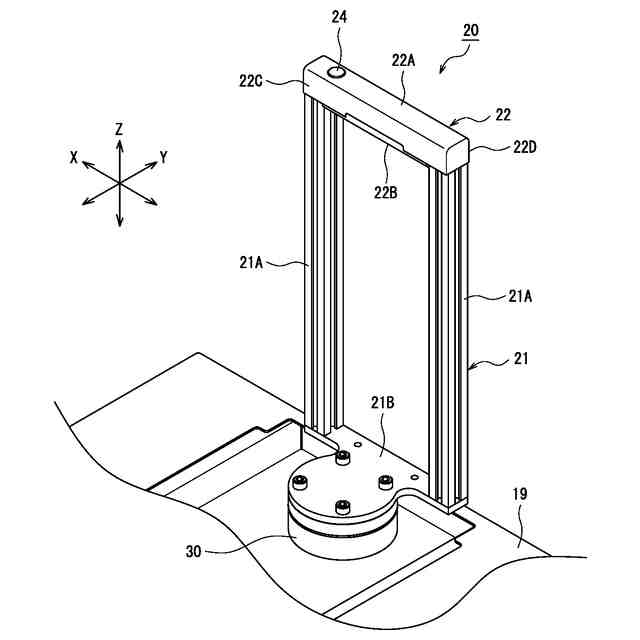
【解決手段】自律移動ロボット1は、ユーザーの移動を支援するロボットであって、目的地に向かって自律走行する自律走行モード、および走行状態を手動で制御可能な手動走行モードで走行可能に構成されたロボット本体10と、ロボット本体10に取り付けられたハンドル20とを備える。ハンドル20は、ロボット本体10を走行させるための第1操作ボタン24と、ロボット本体10のモードを切り替えるための第2操作ボタン25とを有する。第1操作ボタン24は、ハンドル20の把持部22の上面22Aに設けられ、第2操作ボタン25は把持部22の側面22Cに設けられている。
【選択図】図3
特許請求の範囲
【請求項1】
ユーザーの移動を支援する自律移動ロボットであって、
目的地に向かって自律走行する自律走行モード、および走行状態を手動で制御可能な手動走行モードで走行可能に構成されたロボット本体と、
前記ロボット本体に取り付けられたハンドルと、
を備え、
前記ハンドルは、前記ロボット本体を走行させるための第1操作部と、前記ロボット本体のモードを切り替えるための第2操作部とを有し、
前記第1操作部は、前記ハンドルの第1の領域に設けられ、
前記第2操作部は、前記第1の領域と異なる方向を向いた前記ハンドルの第2の領域に設けられている、自律移動ロボット。
続きを表示(約 740 文字)
【請求項2】
前記ハンドルは、前記ロボット本体の移動方向に延びた把持部を有し、
前記第1操作部および前記第2操作部は、前記把持部に設けられている、請求項1に記載の自律移動ロボット。
【請求項3】
前記ハンドルの前記第1の領域は、前記ロボット本体の高さ方向上側を向いた前記把持部の上面である、請求項2に記載の自律移動ロボット。
【請求項4】
前記ハンドルの前記第2の領域は、前記把持部の側面である、請求項3に記載の自律移動ロボット。
【請求項5】
前記ハンドルは、前記ロボット本体の高さ方向に延びたアームを有し、
前記把持部は、前記アームの先端側に設けられ、
前記第2操作部は、前記ロボット本体の側面視において、前記アームと前記高さ方向に重なる位置に設けられている、請求項4に記載の自律移動ロボット。
【請求項6】
前記第2操作部は、前記第1操作部より小さい、請求項1~5のいずれか一項に記載の自律移動ロボット。
【請求項7】
前記第1操作部および前記第2操作部の操作信号に基づいて、前記ロボット本体の動作を制御する制御装置をさらに備え、
前記制御装置は、前記ロボット本体の停止状態で前記第2操作部が操作された場合に、前記ロボット本体のモードを前記手動走行モードに遷移させる、請求項1~5のいずれか一項に記載の自律移動ロボット。
【請求項8】
前記ハンドルに加わる力の大きさと方向を検出するセンサをさらに備え、
前記制御装置は、前記センサの検出情報に基づいて、前記ロボット本体の走行に必要な情報を設定する、請求項7に記載の自律移動ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律移動ロボットに関し、より詳しくは、ユーザーの移動を支援する自律移動ロボットに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
近年、ロボットに搭載されたセンサ等により周囲の環境を認識し、またロボット自身の位置情報を取得して、目的とする場所まで移動することが可能な自律移動ロボットが知られている。自律移動ロボットの一例として、視覚障害者等のユーザーを目的地まで誘導(案内)してユーザーの移動を支援するロボットも提案されている。例えば、特許文献1には、案内用ロボットと、案内用ロボットと別体に設けられたリモコンとを備える移動ロボットシステムが開示されている。
【0003】
特許文献1の案内用ロボットは、ユーザーにより把持されるグリップを含む操作入力部と、目的地を設定するためのタッチパネルとを有し、設定された目的地まで自律走行するように構成されている。特許文献1のシステムによれば、ユーザーのリモコン操作により、目的地に向かう目標経路の途中に予め登録されたトイレ等の経由地を設定でき、案内用ロボットを経由地に立ち寄らせることが可能である。
【先行技術文献】
【特許文献】
【0004】
特開2017-97538号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記のように、自律移動ロボットを使用すれば、視覚障害者であっても設定された目的地に容易に到着することができる。一方、特許文献1に記載されるように、目的地に向かう途中に目標経路から外れた場所に立ち寄りたい場合や、ロボットの向きを変更したい場合も想定される。このため、ロボットの走行状態を手動で制御可能な手動走行モードを備えた自律移動ロボットも提案されているが、ユーザーの誤操作により意図しない走行モードの切り替えなど、誤った動作モードの切り替えが頻繁に発生すると、ユーザビリティが損なわれる。即ち、意図的なモードの切り替えは容易である一方、誤操作については十分に抑制する必要がある。
【課題を解決するための手段】
【0006】
本発明に係る自律移動ロボットは、ユーザーの移動を支援する自律移動ロボットであって、目的地に向かって自律走行する自律走行モード、および走行状態を手動で制御可能な手動走行モードで走行可能に構成されたロボット本体と、ロボット本体に取り付けられたハンドルとを備える。ハンドルは、ロボット本体を走行させるための第1操作部と、ロボット本体のモードを切り替えるための第2操作部とを有する。第1操作部は、ハンドルの第1の領域に設けられ、第2操作部は、当該第1の領域と異なる方向を向いたハンドルの第2の領域に設けられている。
【発明の効果】
【0007】
本発明に係る自律移動ロボットによれば、良好な操作性を確保しつつ、誤操作を抑制できる。本発明に係る自律移動ロボットによれば、動作モードの切り替え用の第2操作部がハンドルに設けられているため、例えば、走行モードの切り替えが容易である。また、第2操作部は、ハンドルにおいて、一般的に使用頻度が高い第1操作部と異なる方向を向いた領域に配置されるため、第2操作部の誤操作による意図しないモードの切り替えが発生し難い。
【図面の簡単な説明】
【0008】
実施形態の一例である自律移動ロボットの斜視図である。
自律移動ロボットの概略構成を示すブロック図である。
自律移動ロボットのハンドルの先端部分を斜め上方から見た図である。
自律移動ロボットのハンドルの先端部分を斜め下方から見た図である。
自律移動ロボットのハンドルの全体を示す斜視図である。
自律移動ロボットの使用方法を説明するための図である。
自律移動ロボットの制御手順の一例を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、図面を参照しながら、本発明に係る自律移動ロボットの実施形態について詳細に説明する。以下で説明する実施形態はあくまでも一例であって、本発明は以下の実施形態に限定されない。また、以下で説明する複数の実施形態および変形例の各構成要素を選択的に組み合わせてなる構成は本発明に含まれている。
【0010】
図1は、本発明の実施形態の一例である自律移動ロボット1の斜視図である。図1に示すように、自律移動ロボット1は、ロボット本体10と、ロボット本体10に取り付けられたハンドル20とを備える。自律移動ロボット1は、ユーザーの移動を支援するロボットであって、目的地までの経路に沿って磁気テープ等の誘導体を配置しなくても、搭載されたセンサ等により周囲の環境を認識して目的地まで移動することが可能である。ロボット本体10は、自律走行機能を有し、目的地に向かって自律走行する自律走行モード、および走行状態を手動で制御可能な手動走行モードで走行可能に構成されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る






 特許ウォッチ
特許ウォッチ