TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024050238
公報種別
公開特許公報(A)
公開日
2024-04-10
出願番号
2022156977
出願日
2022-09-29
発明の名称
自動走行搬送車
出願人
トヨタ自動車株式会社
代理人
個人
主分類
G05D
1/43 20240101AFI20240403BHJP(制御;調整)
要約
【課題】速度の検出精度が低下するおそれを抑制することができる自動走行搬送車の提供。
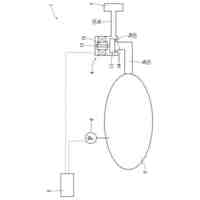
【解決手段】本開示に係る自動走行搬送車100は駆動車輪21aを駆動させることによって走行する。自動走行搬送車100は速度監視ユニット10を備える。速度監視ユニット10は、速度計測用車輪1aと、エンコーダ3と、速度計測用車輪1aの回転をエンコーダ3に伝達する伝達機構2とを備える。速度計測用車輪1aは、駆動車輪21aが接地する走行面RS1上において回転可能に接地する。伝達機構2は、スイングアーム2aと、ベルト2bと、第1の傘歯車2cと、第1の回転軸体2dと、第2の傘歯車2eと、第2の回転軸体2fとを備える。スイングアーム2aは自動走行搬送車100のヨー方向に回動可能に設けられ、速度計測用車輪1aと第1の傘歯車2cとを回転可能に保持する。
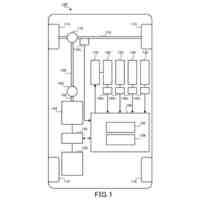
【選択図】図1
特許請求の範囲
【請求項1】
駆動車輪を駆動させることによって走行する自動走行搬送車であって、
速度監視ユニットを備え、
前記速度監視ユニットは、速度計測用車輪と、エンコーダと、前記速度計測用車輪の回転を前記エンコーダに伝達する伝達機構と、を備え、
前記速度計測用車輪は、前記駆動車輪が接地する走行面上において回転可能に接地し、
前記伝達機構は、スイングアームと、ベルトと、第1の傘歯車と、第1の回転軸体と、第2の傘歯車と、第2の回転軸体と、を備え、
前記スイングアームは、前記自動走行搬送車のヨー方向に回動可能に設けられ、前記速度計測用車輪と、前記第1の傘歯車とを回転可能に保持し、
前記速度計測用車輪は、前記速度計測用車輪の回転軸に沿って延びた円柱体である輪軸を備え、
前記第1の傘歯車は、前記速度計測用車輪の軸と平行に延びる軸周りに回転し、
前記第1の回転軸体は、前記第1の傘歯車の回転軸に沿って延びた円柱体であり、
前記ベルトは、前記輪軸と前記第1の回転軸体とに巻き回され、
前記第2の傘歯車は、前記第1の傘歯車とかみ合わされており、
前記第2の回転軸体は、前記第2の傘歯車の回転軸から、軸方向に延びた円柱体であり、
前記速度計測用車輪が回転すると、前記速度計測用車輪の回転運動が、前記輪軸、前記ベルト、前記第1の回転軸体、及び前記第1の傘歯車、及び前記第2の傘歯車を介して、前記第2の回転軸体に伝達して、前記第2の回転軸体が回転し、
前記エンコーダは、前記第2の回転軸体の回転を検出する、
自動走行搬送車。
発明の詳細な説明
【技術分野】
【0001】
本開示は自動走行搬送車に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1には、このような自動走行搬送車の一例として、無人搬送車が開示されている。無人搬送車の車体に装着される全ての車輪ユニットモジュール等は、車輪を駆動する走行用駆動モータを備えた駆動輪ユニットにより構成されている。車輪ユニットモジュール等には、それぞれの進行方向の速度を検出する安全エンコーダ等が組み込まれる。
【先行技術文献】
【特許文献】
【0003】
特開2022-059318号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本願発明者等は、以下の課題を発見した。
このような自動走行搬送車の車輪ユニットに、メカナムホイールやオムニホイール等を用いると、車輪回転数と、検出した速度とが一致しない場合がある。このような場合、速度の検出精度が低下するおそれを抑制するおそれがあった。
【0005】
本開示は、上述した課題を鑑みてなされたものであり、速度の検出精度が低下するおそれを抑制することができる自動走行搬送車を提供するものである。
【課題を解決するための手段】
【0006】
本開示に係る自動走行搬送車は、
駆動車輪を駆動させることによって走行する自動走行搬送車であって、
速度監視ユニットを備え、
前記速度監視ユニットは、速度計測用車輪と、エンコーダと、前記速度計測用車輪の回転を前記エンコーダに伝達する伝達機構と、を備え、
前記速度計測用車輪は、前記駆動車輪が接地する走行面上において回転可能に接地し、
前記伝達機構は、スイングアームと、ベルトと、第1の傘歯車と、第1の回転軸体と、第2の傘歯車と、第2の回転軸体と、を備え、
前記スイングアームは、前記自動走行搬送車のヨー方向に回動可能に設けられ、前記速度計測用車輪と、前記第1の傘歯車とを回転可能に保持し、
前記速度計測用車輪は、前記速度計測用車輪の回転軸に沿って延びた円柱体である輪軸を備え、
前記第1の傘歯車は、前記速度計測用車輪の軸と平行に延びる軸周りに回転し、
前記第1の回転軸体は、前記第1の傘歯車の回転軸に沿って延びた円柱体であり、
前記ベルトは、前記輪軸と前記第1の回転軸体とに巻き回され、
前記第2の傘歯車は、前記第1の傘歯車とかみ合わされており、
前記第2の回転軸体は、前記第2の傘歯車の回転軸から、軸方向に延びた円柱体であり、
前記速度計測用車輪が回転すると、前記速度計測用車輪の回転運動が、前記輪軸、前記ベルト、前記第1の回転軸体、及び前記第1の傘歯車、及び前記第2の傘歯車を介して、前記第2の回転軸体に伝達して、前記第2の回転軸体が回転し、
前記エンコーダは、前記第2の回転軸体の回転を検出する。
【0007】
このような構成によれば、速度計測用車輪の向きは自動走行搬送車の進行方向に追従しつつ、速度計測用車輪の回転数は自動走行搬送車の速度に従う。自動走行搬送車の進行方向が変更しても、速度計測用車輪の向きは自動走行搬送車の進行方向に追従し、エンコーダが、速度計測用車輪の回転数を検出する。この検出した速度計測用車輪の回転数に基づいて、自動走行搬送車の速度を求めることができる。速度の検出精度が低下するおそれを抑制できる。
【発明の効果】
【0008】
本開示によれば、速度の検出精度が低下するおそれを抑制することができる。
【図面の簡単な説明】
【0009】
実施の形態1に係る自動走行搬送車を示す模式図である。
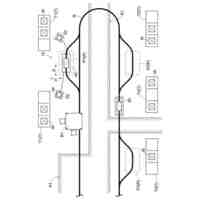
実施の形態1に係る自動走行搬送車の速度監視ユニットを示す模式断面図である。
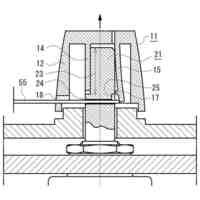
実施の形態1に係る自動走行搬送車の伝達機構の上側を示す模式断面図である。
【発明を実施するための形態】
【0010】
以下、本発明を適用した具体的な実施形態について、図面を参照しながら詳細に説明する。ただし、本発明が以下の実施形態に限定される訳ではない。また、説明を明確にするため、以下の記載及び図面は、適宜、簡略化されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
アズビル株式会社
電圧出力回路
1か月前
アズビル株式会社
流量制御装置
23日前
ミネベアミツミ株式会社
入力装置
14日前
株式会社エクセディ
作業ロボット
2日前
トヨタ自動車株式会社
自動走行搬送車
22日前
エイブリック株式会社
ボルテージレギュレータ
22日前
三菱電機株式会社
移動体制御装置
1日前
株式会社クボタ
故障診断装置
21日前
株式会社デンソー
制御装置
27日前
岩田工機株式会社
加工装置
1日前
株式会社デンソー
制御装置
27日前
リックス株式会社
状態検出装置
17日前
日本プラスト株式会社
節度感付加装置
1か月前
株式会社オリジン
電源装置
1か月前
村田機械株式会社
搬送車システム
7日前
株式会社GSユアサ
電力変換装置
1か月前
株式会社オリジン
電源装置
1か月前
川崎重工業株式会社
要因分析装置及び要因分析方法
27日前
THK株式会社
編集装置及び編集方法
1か月前
THK株式会社
編集装置及び編集方法
1か月前
東洋電装株式会社
移動検出装置および鞍乗車両
29日前
国立大学法人 名古屋工業大学
パラメータ探索空間算出方法
1か月前
株式会社ディスコ
加工装置
1か月前
株式会社FUJI
暖機運転システムを備えた工作機械
1か月前
村田機械株式会社
走行車システム
1か月前
愛三工業株式会社
弁システム
1か月前
株式会社デンソー
ペダル装置
27日前
株式会社デンソー
ペダル装置
1か月前
多摩川精機株式会社
突入電流防止回路
7日前
八重洲無線株式会社
回動つまみの回動軸への取り付け機構
1か月前
株式会社ダイフク
無人航空機の搬送システム
29日前
THK株式会社
変数の突合方法及びプログラム
1か月前
株式会社ディスコ
加工装置
1か月前
株式会社SUBARU
電気自動車
1か月前
株式会社ディスコ
加工装置
7日前
トヨタ自動車株式会社
作業システム
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ