TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024047171
公報種別
公開特許公報(A)
公開日
2024-04-05
出願番号
2022152641
出願日
2022-09-26
発明の名称
要因分析装置及び要因分析方法
出願人
川崎重工業株式会社
代理人
個人
主分類
G05B
23/02 20060101AFI20240329BHJP(制御;調整)
要約
【課題】作業機による作業が不適切となる要因を精度良く特定する要因分析装置を提供する。
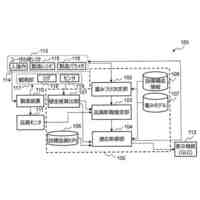
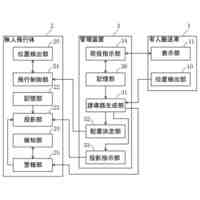
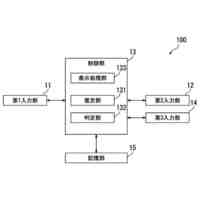
【解決手段】要因分析装置50は、入力部51と、学習部52aと、分析部52bと、通知部52cと、を備える。入力部51には、ロボット11による作業をセンサで計測して得られるセンサデータと、センサデータに対応する作業の作業停止又は作業品質の判定結果と、が入力される。学習部52aは、入力部51に入力されたデータに基づいて、センサデータを入力データとして作業停止又は作業品質の推定結果を出力データとする推定モデルを機械学習により構築する。分析部52bは、推定モデルの入力データと出力データを分析して、センサデータが作業停止又は作業品質の推定に寄与する度合いである寄与度を示す寄与データを作成する。通知部52cは、分析部52bが作成した寄与データを通知する。
【選択図】図1
特許請求の範囲
【請求項1】
作業機による作業をセンサで計測して得られるセンサデータと、当該センサデータに対応する作業の作業停止又は作業品質の判定結果と、が入力される入力部と、
前記入力部に入力されたデータに基づいて、前記センサデータを入力データとして作業停止又は作業品質の推定結果を出力データとする推定モデルを機械学習により構築する学習部と、
前記推定モデルの前記入力データと前記出力データを分析して、前記センサデータが作業停止又は作業品質の推定に寄与する度合いである寄与度を示す寄与データを作成する分析部と、
前記分析部が作成した前記寄与データを通知する通知部と、
を備える、要因分析装置。
続きを表示(約 920 文字)
【請求項2】
請求項1に記載の要因分析装置であって、
前記学習部は、複数の前記推定モデルを構築し、
前記分析部は、複数の前記推定モデルから推定精度が最も高い1つの前記推定モデルを選択し、選択した前記推定モデルを用いて前記寄与データを作成する、要因分析装置。
【請求項3】
請求項2に記載の要因分析装置であって、
前記学習部は、AutoMLを用いて、複数の前記推定モデルを構築する、要因分析装置。
【請求項4】
請求項1に記載の要因分析装置であって、
前記センサはカメラを含み、
前記センサデータは画像を含み、
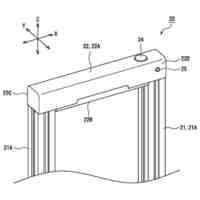
前記分析部は、前記画像の領域毎に前記寄与度を特定して、当該寄与度を前記画像に重畳した要因提示画像を前記寄与データとして作成し、
前記通知部は、前記要因提示画像を表示装置に出力する、要因分析装置。
【請求項5】
請求項1に記載の要因分析装置であって、
前記センサデータは、少なくとも、第1センサデータと、第2センサデータと、を含み、
前記分析部は、前記第1センサデータの前記寄与度と、前記第2センサデータの前記寄与度と、を示す前記寄与データを作成する、要因分析装置。
【請求項6】
請求項1に記載の要因分析装置であって、
前記学習部は、特徴量が抽出されていない前記センサデータを入力データとして前記推定モデルを構築する、要因分析装置。
【請求項7】
作業機による作業をセンサで計測して得られるセンサデータと、当該センサデータに対応する作業の作業停止又は作業品質の判定結果と、を入力し、
入力されたデータに基づいて、前記センサデータを入力データとして作業停止又は作業品質の推定結果を出力データとする推定モデルを機械学習により構築し、
前記推定モデルの前記入力データと前記出力データを分析して、前記センサデータが作業停止又は作業品質の推定に寄与する度合いである寄与度を示す寄与データを作成し、
作成した前記寄与データを通知する、要因分析方法。
発明の詳細な説明
【技術分野】
【0001】
本出願は、主として、作業機による作業が不適切であった場合にその要因を特定する要因分析装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1は、対象物体をロボットに把持させる情報処理装置を開示する。情報処理装置は、対象物体を撮像した視覚情報に基づいて、対象物体の把持の成否確率の分布を決定する。情報処理装置は、把持の成否の判定結果と、成否確率と、に基づいて現在の状態を推定する。例えば、情報処理装置は、成否確率が十分に高い場合、把持に関する制御要因により把持に失敗したと判定する。
【先行技術文献】
【特許文献】
【0003】
特開2019-188516号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の情報処理装置で判定可能な失敗要因は、予め想定された失敗要因であって、かつ、センサ又は制御指令に基づいて明確に判定可能な失敗要因に限られる。しかし、失敗要因は多岐にわたり、かつ、環境に応じて様々な失敗要因が生じ得るため、特許文献1の情報処理装置では失敗要因を十分に特定できない状況が発生し得る。
【0005】
本出願は以上の事情に鑑みてされたものであり、その主要な目的は、作業機による作業が不適切となる要因を精度良く特定する要因分析装置を提供することにある。
【課題を解決するための手段】
【0006】
本出願の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0007】
本出願の第1の観点によれば、以下の構成の要因分析装置が提供される。即ち、要因分析装置は、入力部と、学習部と、分析部と、通知部と、を備える。前記入力部には、作業機による作業をセンサで計測して得られるセンサデータと、当該センサデータに対応する作業の作業停止又は作業品質の判定結果と、が入力される。前記学習部は、前記入力部に入力されたデータに基づいて、前記センサデータを入力データとして作業停止又は作業品質の推定結果を出力データとする推定モデルを機械学習により構築する。前記分析部は、前記推定モデルの前記入力データと前記出力データを分析して、前記センサデータが作業停止又は作業品質の推定に寄与する度合いである寄与度を示す寄与データを作成する。前記通知部は、前記分析部が作成した前記寄与データを通知する。
【0008】
本出願の第2の観点によれば、以下の要因分析方法が提供される。要因分析方法では、作業機による作業をセンサで計測して得られるセンサデータと、当該センサデータに対応する作業の作業停止又は作業品質の判定結果と、を入力する。入力されたデータに基づいて、前記センサデータを入力データとして作業停止又は作業品質の推定結果を出力データとする推定モデルを機械学習により構築する。前記推定モデルの前記入力データと前記出力データを分析して、前記センサデータが作業停止又は作業品質の推定に寄与する度合いである寄与度を示す寄与データを作成する。作成した前記寄与データを通知する。
【発明の効果】
【0009】
本出願によれば、作業機による作業が不適切となる要因を精度良く特定できる。
【図面の簡単な説明】
【0010】
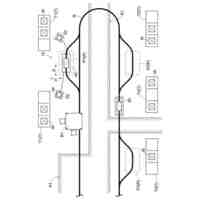
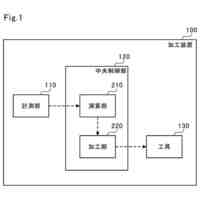
本出願の一実施形態に係る要因分析装置を含む作業システムのブロック図。
作業停止又は作業品質の低下の要因を推定する要因推定処理を示すフローチャート。
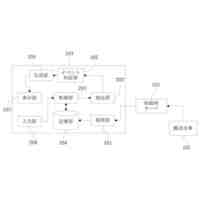
センサデータ及び判定結果から推定モデルを構築し、その評価を行うことを示す説明図。
センサデータの種類毎の寄与度を示すグラフ。
カメラが撮影したツール画像に対して領域毎の寄与度を重畳した要因提示画像。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
アズビル株式会社
流量制御装置
23日前
株式会社エクセディ
作業ロボット
2日前
ミネベアミツミ株式会社
入力装置
14日前
トヨタ自動車株式会社
自動走行搬送車
22日前
三菱電機株式会社
移動体制御装置
1日前
エイブリック株式会社
ボルテージレギュレータ
22日前
株式会社クボタ
故障診断装置
21日前
リックス株式会社
状態検出装置
17日前
岩田工機株式会社
加工装置
1日前
株式会社デンソー
制御装置
27日前
株式会社デンソー
制御装置
27日前
株式会社GSユアサ
電力変換装置
1か月前
村田機械株式会社
搬送車システム
7日前
川崎重工業株式会社
要因分析装置及び要因分析方法
27日前
東洋電装株式会社
移動検出装置および鞍乗車両
29日前
国立大学法人 名古屋工業大学
パラメータ探索空間算出方法
1か月前
株式会社デンソー
ペダル装置
27日前
株式会社ダイフク
無人航空機の搬送システム
29日前
多摩川精機株式会社
突入電流防止回路
7日前
八重洲無線株式会社
回動つまみの回動軸への取り付け機構
1か月前
株式会社ディスコ
加工装置
7日前
株式会社日立製作所
設備診断装置及び設備診断方法
14日前
清水建設株式会社
自律移動ロボット
14日前
清水建設株式会社
自律移動ロボット
14日前
三菱ロジスネクスト株式会社
誘導システム
16日前
株式会社IHI
加工装置および加工方法
17日前
サイレックス・テクノロジー株式会社
通信端末、および、走行状況表示方法
8日前
キオクシア株式会社
製造ラインの管理方法
1か月前
ニデック株式会社
ロット管理システム、ロット管理方法及び表示装置
21日前
ローム株式会社
スレーブ回路およびそれを用いた遠隔制御システム
1日前
株式会社日立製作所
計画ロジック評価支援システムおよび方法
23日前
株式会社東芝
コントローラ
1か月前
住友重機械工業株式会社
移動体の運転支援装置及び自動運転システム
14日前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
27日前
ニデック株式会社
制御装置、走行装置、制御方法及び制御プログラム
27日前
沖電気工業株式会社
ロボット、情報処理方法およびプログラム
29日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ