TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024047448
公報種別
公開特許公報(A)
公開日
2024-04-05
出願番号
2022153063
出願日
2022-09-26
発明の名称
制御装置、走行装置、制御方法及び制御プログラム
出願人
ニデック株式会社
代理人
個人
,
個人
主分類
G05D
1/43 20240101AFI20240329BHJP(制御;調整)
要約
【課題】走行装置の旋回後の位置及び向きの理論値に対する実際値の誤差を簡易な構成によって抑制することができる制御装置、走行装置、制御方法及び制御プログラムの提供。
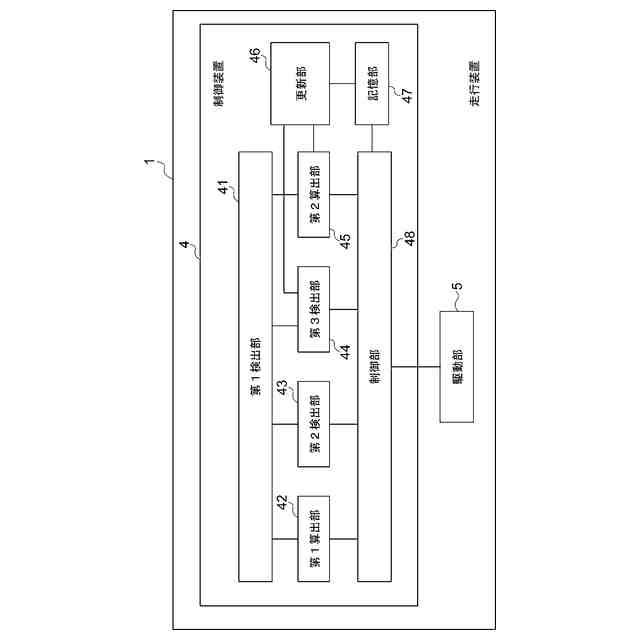
【解決手段】走行装置の旋回後の位置及び向きを補正する制御装置であって、走行装置が旋回する前に、固定物体の2次元外形を検出する第1検出部と、指定角度だけ旋回した走行装置の位置の理論値と向きの理論値とを、第1検出部により検出された固定物体の2次元外形に基づいて算出する第1算出部と、走行装置の旋回後の位置の実際値と向きの実際値とを、第1検出部により検出された固定物体の2次元外形に基づいて検出する第2検出部と、第1算出部により算出された走行装置の位置の理論値及び向きの理論値と、第2検出部により検出された走行装置の位置の実際値及び向きの実際値と、の差に基づいて走行装置の駆動部を制御する制御部と、を有する制御装置。
【選択図】図2
特許請求の範囲
【請求項1】
走行装置の旋回後の位置及び向きを補正する制御装置であって、
前記走行装置が旋回する前に、固定物体の2次元外形を検出する第1検出部と、
指定角度だけ旋回した前記走行装置の位置の理論値と向きの理論値とを、前記第1検出部により検出された前記固定物体の2次元外形に基づいて算出する第1算出部と、
前記走行装置の旋回後の位置の実際値と向きの実際値とを、前記第1検出部により検出された前記固定物体の2次元外形に基づいて検出する第2検出部と、
前記第1算出部により算出された前記走行装置の位置の理論値及び向きの理論値と、前記第2検出部により検出された前記走行装置の位置の実際値及び向きの実際値と、の差に基づいて前記走行装置の駆動部を制御する制御部と、
を有する制御装置。
続きを表示(約 1,500 文字)
【請求項2】
前記第1検出部により検出された前記固定物体の2次元外形に基づいて、前記走行装置の現在位置の実際値と現在の向きの実際値とを検出する第3検出部と、
前記第1検出部により検出された前記固定物体の2次元外形に基づいて、前記走行装置の現在位置の理論値と現在の向きの理論値とを算出する第2算出部と、をさらに備え、
前記制御部は、前記第3検出部により検出された現在位置の実際値及び現在の向きの実際値と、前記第2算出部により算出された現在位置の理論値及び現在の向きの理論値との差に基づいて、前記走行装置の駆動部を制御する、
請求項1に記載の制御装置。
【請求項3】
前記第3検出部により検出された現在位置の実際値と、前記第2算出部により算出された現在位置の理論値との差に基づいて、前記走行装置が有している現在位置情報を更新する更新部をさらに備える請求項2に記載の制御装置。
【請求項4】
前記固定物体は、
所定間隔で隔てられた壁を含む、
請求項2に記載の制御装置。
【請求項5】
前記走行装置は、
所定間隔で隔てられた壁の間を走行可能である、
請求項2に記載の制御装置。
【請求項6】
前記走行装置は、
自律走行装置である、
請求項1から請求項5のいずれかに記載の制御装置。
【請求項7】
前記第1検出部は、
二次元レーザセンサである、
請求項1から請求項5のいずれかに記載の制御装置。
【請求項8】
請求項1から請求項5のいずれかに記載の制御装置と、
前記制御装置により制御される駆動部と、
を有する走行装置。
【請求項9】
走行装置の旋回後の位置及び向きを補正する制御装置における制御方法であって、
前記走行装置が旋回する前に、固定物体の2次元外形を検出する第1検出ステップと、
指定角度だけ旋回した前記走行装置の位置の理論値と向きの理論値とを、前記第1検出ステップにより検出した前記固定物体の2次元外形に基づいて算出する第1算出ステップと、
前記走行装置の旋回後の位置の実際値と向きの実際値とを、前記第1検出ステップにより検出した前記固定物体の2次元外形に基づいて検出する第2検出ステップと、
前記第1算出ステップにより算出した前記走行装置の位置の理論値及び向きの理論値と、前記第2検出ステップにより検出した前記走行装置の位置の実際値及び向きの実際値と、の差に基づいて前記走行装置の駆動部を制御する制御ステップと、
を有する制御方法。
【請求項10】
コンピュータに、
走行装置が旋回する前に、固定物体の2次元外形を検出する第1検出ステップと、
指定角度だけ旋回した前記走行装置の位置の理論値と向きの理論値とを、前記第1検出ステップにより検出した前記固定物体の2次元外形に基づいて算出する第1算出ステップと、
前記走行装置の旋回後の位置の実際値と向きの実際値とを、前記第1検出ステップにより検出した前記固定物体の2次元外形に基づいて検出する第2検出ステップと、
前記第1算出ステップにより算出した前記走行装置の位置の理論値及び向きの理論値と、前記第2検出ステップにより検出した前記走行装置の位置の実際値及び向きの実際値と、の差に基づいて前記走行装置の駆動部を制御する制御ステップと、
を実行させる制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、走行装置の旋回後の位置及び向きを補正する制御装置、走行装置、制御方法及び制御プログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、工場、倉庫又は店舗等において、人間に代わって荷物を搬送する搬送機が知られている。このような搬送機は、目的地まで自律的に移動するため、現在位置を把握する必要がある。
【0003】
従来、自律的に移動する搬送機が現在位置を把握する方法としては、搬送機が床又は壁に設置された位置座標を含むQRコード(登録商標)又は磁気テープ等の物理マーカーより位置座標を読み取って、読み取った位置座標により現在位置を認識する方法が知られている。しかしながら、物理マーカーを設置する場合には、コスト増となると共に物理マーカーを読み取り可能な専用のセンサを搬送機に搭載する必要がある。また、物理マーカーを床に設置した場合には、人が歩いたりフォークリフトが走行したりすることにより、物理マーカーが劣化して剥がれたり破れたりする可能性がある。この場合、物理マーカーを貼り直す必要があり、コスト増となる。
【0004】
また、従来の自律的に移動する搬送機が現在位置を把握する方法としては、搬送機の車輪の回転量から移動量を演算して現在位置を推定する方法が知られている。しかしながら、この方法では、車輪の回転量の誤差が蓄積して位置推定誤差も大きくなるため、周囲の状況を計測できる複数のセンサを組み合わせて移動時の位置推定誤差を補正している。この際に、事前走行時に取得したデータをもとに作成した地図内に、標識等のランドマーク又はマーカーを設定し、後から同じ場所を走行してランドマークを検出した際に現在位置を補正していた。
【0005】
上記したような従来技術の課題に対し、特許文献1は、自車両の周囲に存在する物標と自車両との間の相対位置を自車両の移動量だけ移動させて物標位置データとして蓄積し、自車両が走行してきた方向に観測される観測物標の物標位置データと、蓄積された物標位置データと、を比較して物標位置の差が所定値未満となる区間に蓄積された物標位置データを選択し、選択された物標位置データと、地図情報に含まれる物標位置情報と、を照合して自車両の自己位置を推定する自己位置推定方法を開示している。
【先行技術文献】
【特許文献】
【0006】
特開2018-84492号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1においては、自車両の周囲に存在する物標を検出するための複数のカメラ及び複数のセンサと、地図情報と、が必要になると共に、物標位置データと物標位置情報とを比較する処理を行う演算機を搭載する必要があるため、構成が複雑になるという課題を有する。また、従来、移動せずに旋回する場合に位置誤差が大きくなることが知られており、旋回中の位置誤差を抑制する技術及び旋回後の停止位置精度を向上させる技術が必要である。
【0008】
本発明の目的は、走行装置の旋回後の位置及び向きの理論値に対する実際値の誤差を簡易な構成によって抑制することができる制御装置、走行装置、制御方法及び制御プログラムを提供することである。
【課題を解決するための手段】
【0009】
本発明に係る制御装置は、走行装置の旋回後の位置及び向きを補正する制御装置であって、前記走行装置が旋回する前に、固定物体の2次元外形を検出する第1検出部と、指定角度だけ旋回した前記走行装置の位置の理論値と向きの理論値とを、前記第1検出部により検出された前記固定物体の2次元外形に基づいて算出する第1算出部と、前記走行装置の旋回後の位置の実際値と向きの実際値とを、前記第1検出部により検出された前記固定物体の2次元外形に基づいて検出する第2検出部と、前記第1算出部により算出された前記走行装置の位置の理論値及び向きの理論値と、前記第2検出部により検出された前記走行装置の位置の実際値及び向きの実際値と、の差に基づいて前記走行装置の駆動部を制御する制御部と、を有する。
【0010】
本発明に係る走行装置は、上記の制御装置と、前記制御装置により制御される駆動部と、を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ニデック株式会社
モータ
1日前
ニデック株式会社
コイル挿入装置
1日前
ニデック株式会社
モータ、および無人飛行体
1日前
ニデック株式会社
波動歯車装置およびロボット
1日前
ニデック株式会社
波動歯車装置およびロボット
1日前
ニデック株式会社
電力変換装置、およびモータモジュール
1日前
株式会社クボタ
作業車
3日前
アズビル株式会社
電圧出力回路
1か月前
アズビル株式会社
流量制御装置
1か月前
株式会社エクセディ
作業ロボット
16日前
ミネベアミツミ株式会社
入力装置
28日前
オムロン株式会社
開発装置、開発方法
1日前
トヨタ自動車株式会社
自動走行搬送車
1か月前
三菱電機株式会社
移動体制御装置
15日前
エイブリック株式会社
ボルテージレギュレータ
1か月前
株式会社ダイフク
搬送設備
6日前
株式会社クボタ
故障診断装置
1か月前
株式会社デンソー
制御装置
1か月前
株式会社ダイフク
物品搬送設備
3日前
日本プラスト株式会社
節度感付加装置
1か月前
リックス株式会社
状態検出装置
1か月前
岩田工機株式会社
加工装置
15日前
株式会社デンソー
制御装置
1か月前
株式会社GSユアサ
電力変換装置
1か月前
株式会社オリジン
電源装置
1か月前
村田機械株式会社
搬送車システム
21日前
株式会社オリジン
電源装置
1か月前
株式会社デンソー
過電流検出回路
2日前
川崎重工業株式会社
要因分析装置及び要因分析方法
1か月前
日置電機株式会社
信号出力装置および抵抗測定装置
9日前
THK株式会社
編集装置及び編集方法
1か月前
THK株式会社
編集装置及び編集方法
1か月前
株式会社FUJI
暖機運転システムを備えた工作機械
1か月前
日本精工株式会社
制御システムおよび制御方法
9日前
株式会社ディスコ
加工装置
1か月前
日本精工株式会社
制御システムおよび制御方法
9日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ