TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024055089
公報種別
公開特許公報(A)
公開日
2024-04-18
出願番号
2022161715
出願日
2022-10-06
発明の名称
入力装置
出願人
ミネベアミツミ株式会社
代理人
個人
主分類
G05G
1/10 20060101AFI20240411BHJP(制御;調整)
要約
【課題】操作性を向上する。
【解決手段】入力装置10では、検出板30が、操作ノブ40に連結された連結部32と、ベース20に支持された一対の被支持部36と、を有し、被支持部36が、連結部32に対して操作ノブ40の周方向両側に配置されている。検出板30は、前後方向を幅方向とする略長尺板状の検出部34を有し、検出部34は、検出本体部34Aと、長手方向両側部を構成する一対の脚部34Bと、を有しており、脚部34Bは、検出部34の両端部から同じ方向に延出している。これにより、回転操作時には、連結部32に対して回転操作方向側の検出部34では、一対の脚部34Bが近づくように変形し、連結部32に対して回転操作方向とは反対側の検出部34では、一対の脚部34Bが離れるように変形するため、検出部34の変形量を大きくできる。その結果、操作ノブ40に対する操作量を大きくすることができる。
【選択図】図3
特許請求の範囲
【請求項1】
所定方向に沿った軸線を中心とする軸線回りの回転力が入力される操作ノブと、
前記操作ノブの前記所定方向の一方側に設けられたベースと、
前記操作ノブと前記ベースとの間に設けられ、前記ベースに支持された検出板と、
前記検出板に設けられた歪ゲージと、
前記軸線に対して偏心した位置において前記操作ノブと前記検出板とを連結すると共に、前記回転力を前記検出板に伝達する伝達部と、
を備え、
前記検出板は、
前記伝達部に連結され、前記回転力が伝達される連結部と、
前記連結部に対して前記軸線回りの両側に設けられ、前記ベースに支持された一対の被支持部と、
前記所定方向を幅方向とする長尺板状に形成されると共に、一端部が前記被支持部に接続され、他端部が前記連結部に接続された一対の検出部と、
を有し、
前記検出部は、
前記検出部の長手方向中間部を構成する検出本体部と、
前記検出部の長手方向両側部を構成すると共に、前記検出本体部の長手方向両端部において折り曲げられて当該長手方向両端部から同じ方向に延出された一対の接続部と、
を含んで構成され、
前記歪ゲージが、前記検出部に設けられ、前記検出部の変形時の歪を検出する入力装置。
続きを表示(約 510 文字)
【請求項2】
前記所定方向から見て、前記接続部が前記検出本体部から前記軸線側へ延出しており、
前記連結部が、前記検出本体部よりも前記軸線側に位置している請求項1に記載の入力装置。
【請求項3】
前記被支持部に接続される前記接続部の先端部には、前記所定方向から見て前記連結部とは反対側へ折り曲げられた折曲部が形成され、
前記被支持部が前記折曲部から前記連結部とは反対側へ延出されており、前記被支持部の先端部が前記ベースに支持されている請求項1に記載の入力装置。
【請求項4】
前記歪ゲージが、前記検出本体部に設けられている請求項1~請求項3の何れか1項に記載の入力装置。
【請求項5】
前記操作ノブに前記所定方向の一方側への操作力が付与されたときに、前記検出板が変形することで、前記操作ノブが前記所定方向の一方側へ移動する請求項4に記載の入力装置。
【請求項6】
前記操作ノブの外周部に前記軸線へ向けた操作力が付与されたときに、前記検出板が変形することで、前記操作ノブが前記軸線に対して直交する方向へ移動する請求項5に記載の入力装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、入力装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
下記特許文献1に記載の入力装置(シートスイッチ構造体)では、ノブが、軸部の先端部に設けられており、検出板の板状部が、軸部の基端部に設けられている。板状部の一側面には、4箇所の歪ゲージが設けられている。また、板状部の外周部は、枠体によって固定されている。そして、ノブに対する操作時における検出板の歪を歪ゲージが検出することで、ノブの回転操作、傾倒操作、押込み操作の各操作を検知することができる。
【先行技術文献】
【特許文献】
【0003】
特開2011-82034号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記入力装置では、以下に示す点において改善の余地がある。すなわち、上記入力装置では、板状部が軸部の軸方向を厚み方向とする円板状に形成され、板状部の中央部に軸部が設けられているため、例えば、ノブの回転操作時では、板状部が歪みにくい構造となっている。これにより、ノブの回転操作時におけるノブに対する操作量が比較的小さいため、ノブへの操作が十分であったのかが分かり難くなる可能性がある。すなわち、上記入力装置では、ノブへの操作性が低下する可能性があり、操作性を向上するという点において改善の余地がある。
【0005】
本発明は、上記事実を考慮して、操作性を向上することができる入力装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の1又はそれ以上の実施形態は、所定方向に沿った軸線を中心とする軸線回りの回転力が入力される操作ノブと、前記操作ノブの前記所定方向の一方側に設けられたベースと、前記操作ノブと前記ベースとの間に設けられ、前記ベースに支持された検出板と、前記検出板に設けられた歪ゲージと、前記軸線に対して偏心した位置において前記操作ノブと前記検出板とを連結すると共に、前記回転力を前記検出板に伝達する伝達部と、を備え、前記検出板は、前記伝達部に連結され、前記回転力が伝達される連結部と、前記連結部に対して前記軸線回りの両側に設けられ、前記ベースに支持された一対の被支持部と、前記所定方向を幅方向とする長尺板状に形成されると共に、一端部が前記被支持部に接続され、他端部が前記連結部に接続された一対の検出部と、を有し、前記検出部は、前記検出部の長手方向中間部を構成する検出本体部と、前記検出部の長手方向両側部を構成すると共に、前記検出本体部の長手方向両端部において折り曲げられて当該長手方向両端部から同じ方向に延出された一対の接続部と、を含んで構成され、前記歪ゲージが、前記検出部に設けられ、前記検出部の変形時の歪を検出する入力装置である。
【発明の効果】
【0007】
本発明の1又はそれ以上の実施形態によれば、操作性を向上することができる。
【図面の簡単な説明】
【0008】
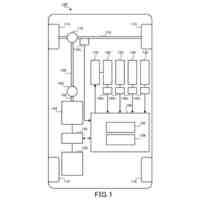
(A)は、本実施形態に係る入力装置を示す斜視図であり、(B)は、本実施形態に係る入力装置を示す前側から見た正面図である。
図1(B)の入力装置の操作ノブを取外した状態を示す正面図である。
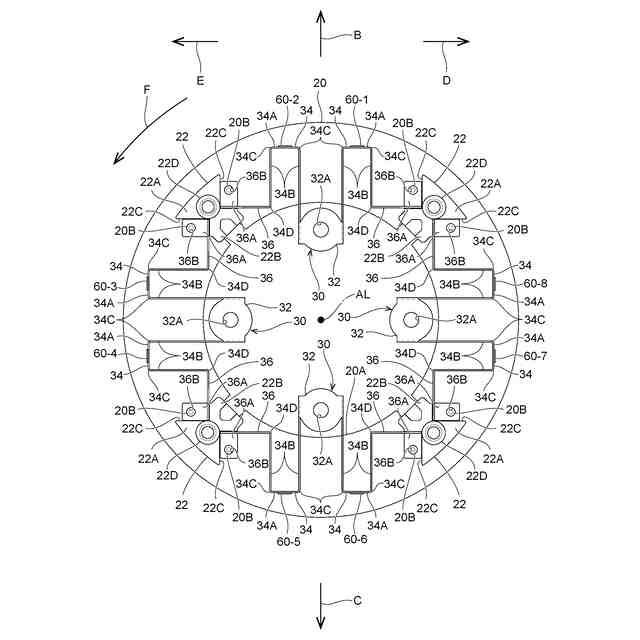
図2の入力装置の基板を取外した状態を示す正面図である。
図1(B)に示される入力装置の内部を示す第2方向一方側から見た断面図(図1(B)の4-4線断面図)である。
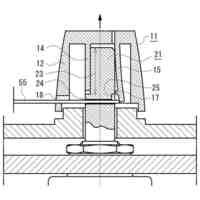
図2に示される基板のベースへの固定状態を示す断面図(図2の5-5線断面図)である。
図3に示される検出板を示す斜視図である。
(A)は、図3に示される検出板の変形例1を示す正面図であり、(B)は、検出板の変形例2を示す正面図であり、(C)は、検出板の変形例3を示す正面図である。
【発明を実施するための形態】
【0009】
以下、図面を用いて、本実施形態に係る入力装置10について説明する。なお、図面に適宜示される矢印Aは、入力装置10の前側を示しており、以下の説明において、前後の方向を用いて説明するときには、特に断りのない限り、入力装置10の前後方向を示すものとする。そして、前後方向が、本発明の所定方向に対応し、後側が本発明の所定方向の一方側に対応している。また、以下の説明では、前後方向に直交する方向を第1方向(図1の矢印B方向及び矢印C方向参照)とし、前側から見た正面視で第1方向に直交する方向を第2方向(図1の矢印D方向及び矢印E方向参照)としている。
【0010】
図1(A)及び(B)に示されるように、入力装置10は、全体として前後方向を高さ方向とする略円柱状に形成されており、入力装置10の高さが比較的低く設定されている。図2~図5にも示されるように、入力装置10は、ベース20と、複数(本実施の形態では、4個)の検出板30と、操作ノブ40と、基板50と、複数(本実施の形態では、8個)の歪ゲージ60と、を含んで構成されている。また、入力装置10は、押圧操作、スライド操作、及び回転操作可能に構成されている。ここで、入力装置10の押圧操作では、操作ノブ40が後側へ押圧操作され、入力装置10のスライド操作では、操作ノブ40が径方向にスライド操作され、入力装置10の回転操作では、操作ノブ40が周方向に回転操作されるようになっている。以下、入力装置10の各構成について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
アズビル株式会社
流量制御装置
23日前
ミネベアミツミ株式会社
入力装置
14日前
株式会社エクセディ
作業ロボット
2日前
トヨタ自動車株式会社
自動走行搬送車
22日前
エイブリック株式会社
ボルテージレギュレータ
22日前
三菱電機株式会社
移動体制御装置
1日前
株式会社クボタ
故障診断装置
21日前
株式会社デンソー
制御装置
27日前
株式会社デンソー
制御装置
27日前
日本プラスト株式会社
節度感付加装置
1か月前
リックス株式会社
状態検出装置
17日前
岩田工機株式会社
加工装置
1日前
村田機械株式会社
搬送車システム
7日前
株式会社オリジン
電源装置
1か月前
株式会社GSユアサ
電力変換装置
1か月前
株式会社オリジン
電源装置
1か月前
川崎重工業株式会社
要因分析装置及び要因分析方法
27日前
THK株式会社
編集装置及び編集方法
1か月前
THK株式会社
編集装置及び編集方法
1か月前
株式会社FUJI
暖機運転システムを備えた工作機械
1か月前
東洋電装株式会社
移動検出装置および鞍乗車両
29日前
村田機械株式会社
走行車システム
1か月前
株式会社ディスコ
加工装置
1か月前
国立大学法人 名古屋工業大学
パラメータ探索空間算出方法
1か月前
愛三工業株式会社
弁システム
1か月前
株式会社デンソー
ペダル装置
1か月前
株式会社デンソー
ペダル装置
27日前
八重洲無線株式会社
回動つまみの回動軸への取り付け機構
1か月前
多摩川精機株式会社
突入電流防止回路
7日前
株式会社ダイフク
無人航空機の搬送システム
29日前
THK株式会社
変数の突合方法及びプログラム
1か月前
株式会社ディスコ
加工装置
7日前
株式会社SUBARU
電気自動車
1か月前
株式会社ディスコ
加工装置
1か月前
株式会社東芝
データ処理装置及びガス変換システム
1か月前
株式会社日立製作所
設備診断装置及び設備診断方法
14日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ