TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024045972
公報種別
公開特許公報(A)
公開日
2024-04-03
出願番号
2022151085
出願日
2022-09-22
発明の名称
無人航空機の搬送システム
出願人
株式会社ダイフク
代理人
弁理士法人R&C
主分類
G05D
1/46 20240101AFI20240327BHJP(制御;調整)
要約
【課題】搬送効率が高い搬送システムを実現する。
【解決手段】無人航空機20及び搬送車40を制御する制御装置を備え、制御装置は、無人航空機20の目的地T1を指定した移動指令を搬送車40及び当該搬送車40に保持された無人航空機20の双方に対して出力し、移動指令を受け取った搬送車40は、走行経路R上における、目的地T1に対応して設定された停止位置である対応停止位置P1まで走行して対応停止位置P1に停止し、無人航空機20は、搬送車40が対応停止位置P1に停止した状態で、航空機保持部から離陸して目的地T1へ移動する。
【選択図】図1
特許請求の範囲
【請求項1】
無人航空機と、
前記無人航空機を保持する航空機保持部を備え、規定の走行経路に沿って走行する搬送車と、
前記無人航空機及び前記搬送車を制御する制御装置と、
を備え、
前記制御装置は、前記無人航空機の目的地を指定した移動指令を前記搬送車及び当該搬送車に保持された前記無人航空機の双方に対して出力し、
前記移動指令を受け取った前記搬送車は、前記走行経路上における、前記目的地に対応して設定された停止位置である対応停止位置まで走行して前記対応停止位置に停止し、
前記移動指令を受け取った前記無人航空機は、前記搬送車が前記対応停止位置に停止した状態で、前記航空機保持部から離陸して前記目的地へ移動する、無人航空機の搬送システム。
続きを表示(約 1,100 文字)
【請求項2】
前記無人航空機の前記目的地を指定した前記移動指令を第1移動指令とし、
前記制御装置は、前記第1移動指令の出力と、第2移動指令及び第3移動指令の出力と、を選択的に実行し、
前記第2移動指令は、前記走行経路上に設定された前記搬送車の目的停止位置を指定して前記搬送車に対して出力される移動指令であり、
前記第3移動指令は、前記無人航空機の前記目的地を指定して前記無人航空機に対して出力される移動指令であり、
前記制御装置は、前記第2移動指令を前記搬送車に対して出力した後に、当該搬送車に保持された前記無人航空機に対して前記第3移動指令を出力することができるように構成され、
前記第2移動指令を受け取った前記搬送車は、前記目的停止位置まで走行して前記目的停止位置に停止し、
前記第3移動指令を受け取った前記無人航空機は、前記搬送車が前記目的停止位置に停止した状態で、前記航空機保持部から離陸して前記目的地へ移動する、請求項1に記載の無人航空機の搬送システム。
【請求項3】
前記搬送車は、前記無人航空機が前記目的地から帰還して前記航空機保持部に着陸するまで、前記対応停止位置に停止する、請求項1に記載の無人航空機の搬送システム。
【請求項4】
前記無人航空機は、物品の保持及び当該保持の解除が可能である物品保持部を備え、
前記制御装置は、前記移動指令における前記目的地として、前記物品を搬送する搬送先、及び、前記物品を受け取る受取先の少なくとも一方を指定する、請求項1に記載の無人航空機の搬送システム。
【請求項5】
前記制御装置は、操作者の操作入力を受け付ける操作受付部を備えると共に、定められたプログラムに従って前記目的地を自動的に設定するモードである自動モードと、前記操作入力に応じて前記無人航空機及び前記搬送車を制御するモードである手動モードと、に切り替え可能に構成され、
前記自動モードでは、前記搬送車の走行中における前記無人航空機の飛行は禁止され、
前記手動モードでは、前記操作入力に応じて前記搬送車の走行が行われると共に、前記搬送車が走行中であるか停止中であるかに関わらず、前記操作入力に応じて前記無人航空機の飛行が行われる、請求項1から4のいずれか一項に記載の無人航空機の搬送システム。
【請求項6】
前記対応停止位置は、前記無人航空機が前記航空機保持部から離陸する場合の障害になる障害物がない場所に設定されている、請求項1から4のいずれか一項に記載の無人航空機の搬送システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、無人航空機の搬送システムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
無人航空機の搬送システムが知られている。特許文献1には、物品を搬送する無人航空機の搬送システムが開示されている。
【0003】
特許文献1に開示されている搬送システムの無人航空機は、商用電力の電線路に沿って飛行し、電線路を流れる商用電力を利用して充電される。このため、充電している時間は無人航空機の移動が中断されてしまう。特に、重量物である物品を搬送する場合には無人航空機の充電回数が増えることになる。また、屋内や屋外で飛行禁止区域がある場合には、その区域を無人航空機が迂回する必要がある。これらのことにより、物品や無人航空機の搬送効率が低くなるという問題があった。
【先行技術文献】
【特許文献】
【0004】
特開2021-20529号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
そこで、搬送効率が高い搬送システムの実現が望まれる。
【課題を解決するための手段】
【0006】
無人航空機と、前記無人航空機を保持する航空機保持部を備え、規定の走行経路に沿って走行する搬送車と、前記無人航空機及び前記搬送車を制御する制御装置と、を備え、前記制御装置は、前記無人航空機の目的地を指定した移動指令を前記搬送車及び当該搬送車に保持された前記無人航空機の双方に対して出力し、前記移動指令を受け取った前記搬送車は、前記走行経路上における、前記目的地に対応して設定された停止位置である対応停止位置まで走行して前記対応停止位置に停止し、前記無人航空機は、前記搬送車が前記対応停止位置に停止した状態で、前記航空機保持部から離陸して前記目的地へ移動する。
【0007】
本構成によれば、搬送車により目的地に対応する対応停止位置まで無人航空機を搬送することができ、当該対応停止位置から目的地まで無人航空機が飛行することができる。このため、例えば、無人航空機と搬送車とにより重量物を搬送する場合に無人航空機の飛行距離や飛行時間を削減できる。また、例えば、搬送車により複数の無人航空機をまとめて搬送したり、無人航空機が飛行できない区間であっても搬送車を用いて無人航空機を移動させることができる。従って、物品や無人航空機の搬送効率を高くすることができる。また、走行経路が設定されていない場所が目的地となった場合であっても無人航空機により目的地まで到達することができるため、搬送車の走行経路を想定される目的地の全てに近接させて設ける必要がなくなるため、走行経路の設置費用を低減できる。また、搬送車が対応停止位置に停止した状態で無人航空機が離陸するため、自動で飛行する無人航空機の離陸を精度よく行い易い。
【図面の簡単な説明】
【0008】
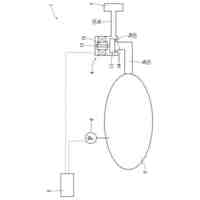
第1の実施形態に係る無人航空機の搬送システムを示す図
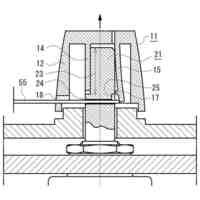
図1の無人航空機及び搬送車の側面図
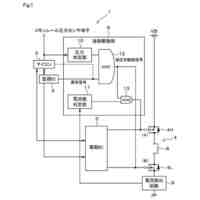
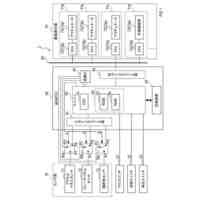
図1の搬送システムのブロック図
図1の搬送システムによる無人航空機搬送処理のフローチャート
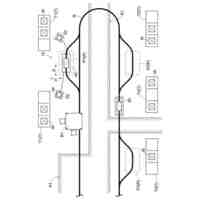
第2の実施形態に係る無人航空機の搬送システムを示す図
図5の搬送システムによる無人航空機搬送処理のフローチャート
【発明を実施するための形態】
【0009】
〔第1の実施形態〕
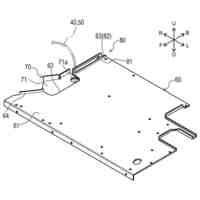
以下では、本実施形態に係る無人航空機20の搬送システム10について、図面を参照して説明する。図1は、本実施形態に係る無人航空機20の搬送システム10を示す図である。搬送システム10は、無人航空機20と、規定の走行経路Rに沿って走行する搬送車40とを備えている。ここで、鉛直方向に沿う方向を上下方向Zとし、走行経路Rに沿う方向を走行方向Xとし、上下方向視で走行方向Xに直交する方向を幅方向Yとする。本実施形態では、搬送システム10は、複数の無人航空機20と、複数の搬送車40と、を備える。なお、搬送システム10が備える無人航空機20、搬送車40のそれぞれの数は適宜設定可能である。また、本実施形態では、走行経路Rは、無人航空機20の飛行が禁止される飛行禁止エリアA1を通るように構成されている。
【0010】
無人航空機20としては、遠隔操作或いは自律飛行が可能な固定翼機や回転翼機が例として挙げられる。本実施形態では、無人航空機20は垂直離着陸可能な電動式の回転翼機である。好適には、無人航空機20は自律飛行が可能なマルチコプタ(所謂ドローン)である。また、好適には、無人航空機20は、後述の給電線62を介して搬送車40が備える電源部63から電力が供給される有線式の回転翼機である。無人航空機20は、例えば、受取先である目的地T1から物品Wを受け取り、搬送先である目的地T2或いは目的地T3に物品Wを搬送する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
1か月前
アズビル株式会社
電圧出力回路
1か月前
アズビル株式会社
流量制御装置
23日前
ミネベアミツミ株式会社
入力装置
14日前
株式会社エクセディ
作業ロボット
2日前
トヨタ自動車株式会社
自動走行搬送車
22日前
エイブリック株式会社
ボルテージレギュレータ
22日前
三菱電機株式会社
移動体制御装置
1日前
株式会社クボタ
故障診断装置
21日前
株式会社クボタ
操作機構及び作業車
1か月前
日本プラスト株式会社
節度感付加装置
1か月前
株式会社デンソー
制御装置
27日前
株式会社デンソー
制御装置
27日前
岩田工機株式会社
加工装置
1日前
リックス株式会社
状態検出装置
17日前
株式会社デンソー
減圧弁制御装置
1か月前
株式会社オリジン
電源装置
1か月前
株式会社オリジン
電源装置
1か月前
村田機械株式会社
搬送車システム
7日前
株式会社GSユアサ
電力変換装置
1か月前
株式会社デンソー
電子制御装置
1か月前
THK株式会社
編集装置及び編集方法
1か月前
川崎重工業株式会社
要因分析装置及び要因分析方法
27日前
THK株式会社
編集装置及び編集方法
1か月前
株式会社FUJI
暖機運転システムを備えた工作機械
1か月前
株式会社ディスコ
加工装置
1か月前
東洋電装株式会社
移動検出装置および鞍乗車両
29日前
国立大学法人 名古屋工業大学
パラメータ探索空間算出方法
1か月前
村田機械株式会社
走行車システム
1か月前
DMG森精機株式会社
工作機械
1か月前
株式会社デンソー
ペダル装置
1か月前
愛三工業株式会社
弁システム
1か月前
株式会社デンソー
ペダル装置
27日前
八重洲無線株式会社
回動つまみの回動軸への取り付け機構
1か月前
株式会社ダイフク
無人航空機の搬送システム
29日前
多摩川精機株式会社
突入電流防止回路
7日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ