TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024040527
公報種別
公開特許公報(A)
公開日
2024-03-26
出願番号
2021006252
出願日
2021-01-19
発明の名称
走行車システム
出願人
村田機械株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20240318BHJP(制御;調整)
要約
【課題】走行車コントローラにおける処理負荷の割合を増加させることなく、走行車の状態を他の走行車に配信することができる走行車システムを提供する。
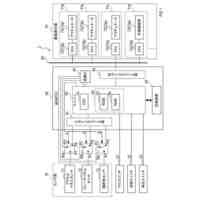
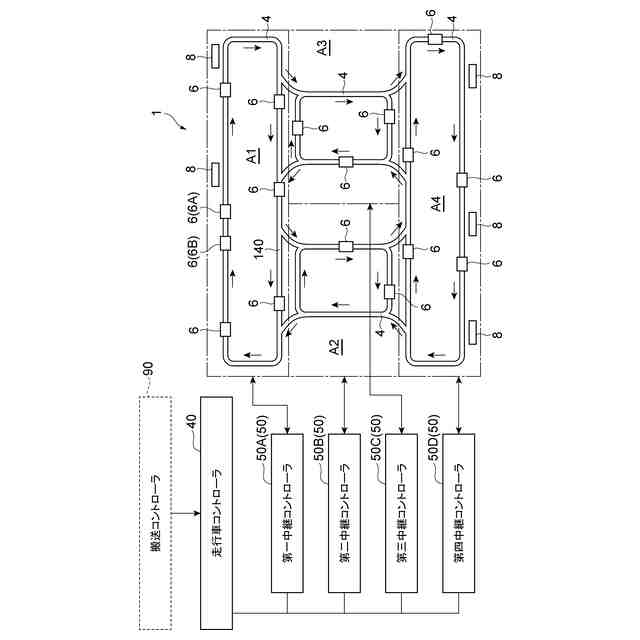
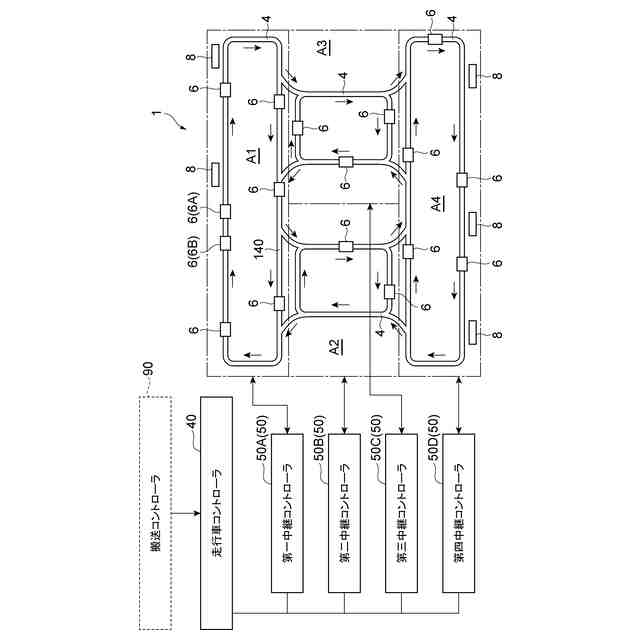
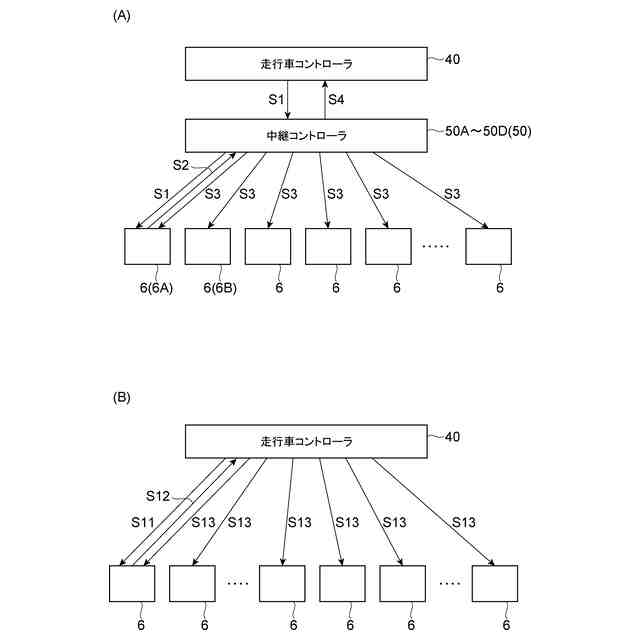
【解決手段】走行車システム1は、複数の走行車6と、走行車コントローラ40と、走行車コントローラ40及び走行車6の両方と通信可能に設けられた中継コントローラ50と、を備える。走行車コントローラ40は、中継コントローラ50を介して搬送指令を一の走行車に6割り付け、走行車6は、自車の状態に関する情報を中継コントローラ50に送信し、中継コントローラ50は、受信した自車の状態に関する情報を走行車コントローラ40を介することなく、通信可能な走行車6の少なくとも一部に送信する。
【選択図】図1
特許請求の範囲
【請求項1】
複数の走行車と、
走行車コントローラと、
前記走行車コントローラ及び前記走行車の両方と通信可能に設けられた中継コントローラと、を備え、
前記走行車コントローラは、前記中継コントローラを介して搬送指令を一の前記走行車に割り付け、
前記走行車は、自車の状態に関する情報を前記中継コントローラに送信し、
前記中継コントローラは、受信した前記自車の状態に関する情報を前記走行車コントローラを介することなく、前記通信可能な走行車の少なくとも一部に送信する、走行車システム。
続きを表示(約 730 文字)
【請求項2】
前記中継コントローラは、受信した前記自車の状態に関する情報を前記通信可能な前記走行車にブロードキャスト配信する、請求項1記載の走行車システム。
【請求項3】
前記走行車コントローラは、前記中継コントローラを介して複数の前記走行車のそれぞれに自車の状態を問い合わせ、
前記走行車のそれぞれは、前記走行車コントローラからの問い合わせを受信すると、前記自車の状態に関する情報を前記中継コントローラに送信し、
前記中継コントローラは、前記走行車から受信した前記自車の状態に関する情報を、前記通信可能な走行車の少なくとも一部に送信すると共に、前記走行車コントローラにも送信する、請求項1又は2記載の走行車システム。
【請求項4】
前記自車の状態に関する情報は、前記走行車の位置、速度、加減速度、停止可能位置、搬送物品の有無、搬送物品の識別子及び走行規制に関する情報の少なくとも一つの少なくとも一つである、請求項1~3の何れか一項記載の走行車システム。
【請求項5】
前記中継コントローラは、受信した前記自車の状態に関する情報を、送信元の前記走行車を含めて前記通信可能な走行車に送信する、請求項1~4の何れか一項記載の走行車システム。
【請求項6】
前記中継コントローラは、互いに異なる領域をそれぞれ管轄するように複数設けられており、
前記走行車コントローラは、複数の前記中継コントローラと通信可能に設けられ、複数の前記中継コントローラのそれぞれは、管轄する領域に位置する前記走行車と通信可能に設けられている、請求項1~5の何れか一項記載の走行車システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、走行車システムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
例えば、下記の特許文献1には、複数の走行車と、走行車を制御する走行車コントローラとを備える走行車システムが開示されている。この走行車システムの走行車コントローラは、各走行車から停止位置を示す情報を受信し、受信した情報をブロードキャスト配信する。各走行車は、当該情報を利用することによって、走行車同士の干渉を防止しつつ走行車の追従走行を実現している。
【先行技術文献】
【特許文献】
【0003】
特開2018-97406号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、走行車から送信されてくる上記のような情報を、走行車コントローラを介して他の走行車に配信する上記従来の走行車システムでは、走行車コントローラによって実行される配信処理の負荷の割合が、走行車コントローラによって実行される各種処理の負荷全体に対して増加する。この場合、走行車コントローラにおける他の処理(例えば、搬送指令の割り付け制御等の処理)に影響を与えるおそれがある。
【0005】
そこで、本発明の目的は、走行車コントローラにおける処理負荷の割合を増加させることなく、走行車の状態を他の走行車に配信することができる走行車システムを提供することにある。
【課題を解決するための手段】
【0006】
本発明の走行車システムは、複数の走行車と、走行車コントローラと、走行車コントローラ及び走行車の両方と通信可能に設けられた中継コントローラと、を備え、走行車コントローラは、中継コントローラを介して搬送指令を一の走行車に割り付け、走行車は、自車の状態に関する情報を中継コントローラに送信し、中継コントローラは、受信した自車の状態に関する情報を走行車コントローラを介することなく、通信可能な走行車の少なくとも一部に送信する。
【0007】
この構成の走行車システムでは、走行車から送信されてくる自車の状態に関する情報は、走行車コントローラを介することなく中継コントローラによって他の走行車に送信される。このため、搬送指令の割り付け処理を実行する走行車コントローラは、上記自車の状態に関する情報を他の走行車に送信するための処理負荷が発生しない。すなわち、本発明の走行車システムは、走行車コントローラにおける処理負荷の割合を増加させることなく、走行車の状態を他の走行車に配信することができる。
【0008】
本発明の走行車システムでは、中継コントローラは、受信した自車の状態に関する情報を通信可能な走行車にブロードキャスト配信してもよい。この構成では、迅速且つ効率的に各走行車の状態を他の走行車に配信することができる。
【0009】
本発明の走行車システムでは、走行車コントローラは、中継コントローラを介して複数の走行車のそれぞれに自車の状態を問い合わせ、走行車のそれぞれは、走行車コントローラからの問い合わせを受信すると、自車の状態に関する情報を中継コントローラに送信し、中継コントローラは、走行車から受信した自車の状態に関する情報を、通信可能な走行車の少なくとも一部に送信すると共に、走行車コントローラにも送信してもよい。この構成では、走行車コントローラも、各走行車の状態に関する情報を取得することができる。
【0010】
本発明の走行車システムでは、自車の状態に関する情報は、走行車の位置、速度、加減速度、停止可能位置、搬送物品の有無、搬送物品の識別子及び走行規制に関する情報の少なくとも一つであってもよい。この構成では、各走行車は、上述したような他の走行車の状態に関する情報を取得することができるので、これらの情報を利用して、例えば、渋滞箇所を回避したり、追従走行を実行したり、通信状態を診断したりすることが可能となる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
1か月前
アズビル株式会社
流量制御装置
20日前
アズビル株式会社
電圧出力回路
1か月前
ミネベアミツミ株式会社
入力装置
11日前
トヨタ自動車株式会社
自動走行搬送車
19日前
エイブリック株式会社
ボルテージレギュレータ
19日前
株式会社クボタ
故障診断装置
18日前
株式会社クボタ
操作機構及び作業車
1か月前
株式会社デンソー
制御装置
24日前
株式会社デンソー
制御装置
24日前
日本プラスト株式会社
節度感付加装置
1か月前
リックス株式会社
状態検出装置
14日前
株式会社GSユアサ
電力変換装置
27日前
株式会社オリジン
電源装置
1か月前
株式会社オリジン
電源装置
1か月前
村田機械株式会社
搬送車システム
4日前
株式会社デンソー
減圧弁制御装置
1か月前
株式会社デンソー
電子制御装置
1か月前
川崎重工業株式会社
要因分析装置及び要因分析方法
24日前
THK株式会社
編集装置及び編集方法
1か月前
THK株式会社
編集装置及び編集方法
1か月前
国立大学法人 名古屋工業大学
パラメータ探索空間算出方法
1か月前
村田機械株式会社
走行車システム
1か月前
株式会社FUJI
暖機運転システムを備えた工作機械
1か月前
株式会社ディスコ
加工装置
1か月前
東洋電装株式会社
移動検出装置および鞍乗車両
26日前
株式会社デンソー
ペダル装置
1か月前
株式会社デンソー
ペダル装置
24日前
DMG森精機株式会社
工作機械
1か月前
愛三工業株式会社
弁システム
1か月前
多摩川精機株式会社
突入電流防止回路
4日前
八重洲無線株式会社
回動つまみの回動軸への取り付け機構
1か月前
株式会社ダイフク
無人航空機の搬送システム
26日前
THK株式会社
変数の突合方法及びプログラム
1か月前
学校法人早稲田大学
ロボット、軌道計画装置及びプログラム
1か月前
株式会社ディスコ
加工装置
4日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ