TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024029789
公報種別
公開特許公報(A)
公開日
2024-03-07
出願番号
2022132166
出願日
2022-08-23
発明の名称
ロボット、軌道計画装置及びプログラム
出願人
学校法人早稲田大学
代理人
個人
主分類
G05D
1/43 20240101AFI20240229BHJP(制御;調整)
要約
【課題】能動的働きかけを駆使する前進的行動と、戦略的な待機や迂回を伴う後退的行動とを必要に応じて適切に選択する軌道計画を可能にすること。
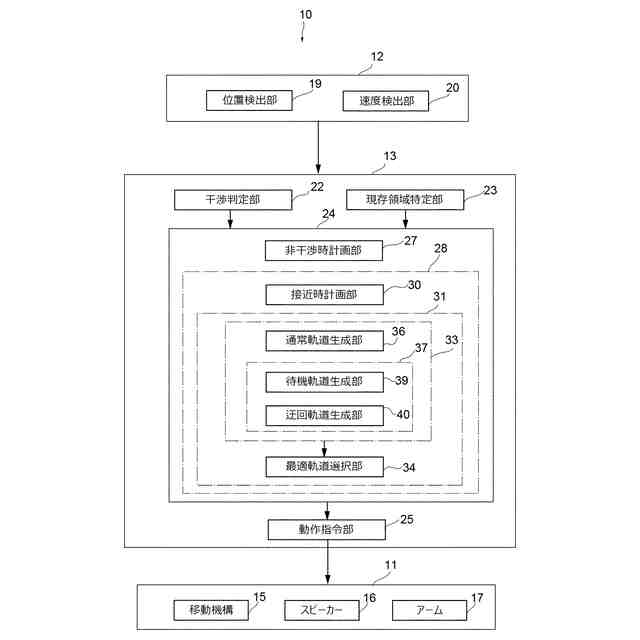
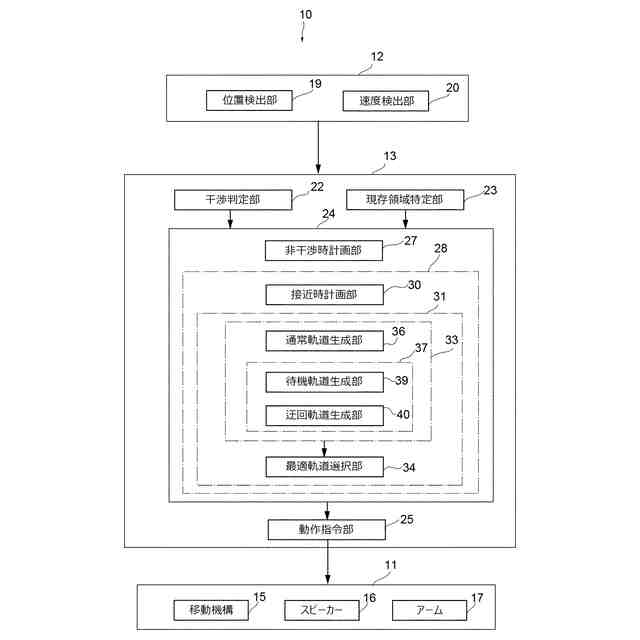
【解決手段】本発明のロボット10は、障害物の位置情報及び速度情報を検出する検出装置12と、検出装置12の検出結果から障害物との干渉可能性を推定して自律移動を制御する制御装置13とを備えている。制御装置13は、周囲の状況に応じてロボット10をゴール地点に移動させるための軌道の候補となる候補軌道を複数生成する候補軌道探索部33と、各候補軌道の中から最適となる最適軌道を選択して実行軌道とする最適軌道選択部34とを含む。候補軌道探索部33は、前進的行動を行うための通常軌道を候補軌道として生成する通常軌道生成部36と、後退的行動を行うための戦略的軌道を候補軌道として生成する戦略的軌道生成部37とを備えている。
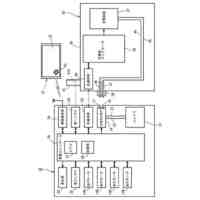
【選択図】 図1
特許請求の範囲
【請求項1】
周囲に存在する障害物を避けながら自律移動するロボットにおいて、
前記障害物の位置情報及び速度情報を検出する検出装置と、当該検出装置の検出結果から、前記障害物との干渉可能性を推定して前記自律移動を制御する制御装置とを備え、
前記制御装置は、現在地からゴール地点までの間の前記ロボットの軌道計画を行う軌道計画部と、当該軌道計画部での軌道計画によって特定された実行軌道に沿って前記ロボットを移動させるように動作指令する動作指令部とを備え、
前記軌道計画部は、周囲の状況に応じて前記ロボットを前記ゴール地点に移動させるための軌道の候補となる候補軌道を複数生成する候補軌道探索部と、前記各候補軌道の中から最適となる最適軌道を選択して前記実行軌道とする最適軌道選択部とを備え、
前記候補軌道探索部は、前記ゴール地点に向かって前進し続ける前進的行動を行うための通常軌道を前記候補軌道として生成する通常軌道生成部と、前記通常軌道に対して前記ゴール地点から一旦遠ざかる後退的行動を行うための戦略的軌道を前記候補軌道として生成する戦略的軌道生成部とを備え、
前記戦略的軌道生成部は、前記通常軌道から外れた地点で前記障害物との干渉が予想されないサブゴールを設定し、当該サブゴールに移動して一旦待機した後で前記ゴール地点に向かう待機軌道を前記戦略的軌道として生成する待機軌道生成部と、前記サブゴールを設定し、当該サブゴールを経由して前記ゴール地点に向かう迂回軌道を前記戦略的軌道として生成する迂回軌道生成部とを備えたことを特徴とするロボット。
続きを表示(約 1,500 文字)
【請求項2】
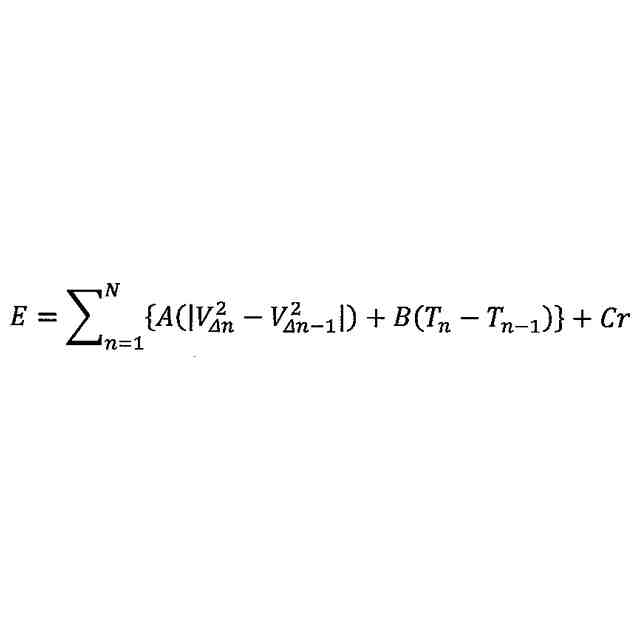
前記最適軌道選択部では、前記候補軌道探索部で生成された全ての前記候補軌道に対し、それらの移動効率と周囲の人間に与える影響とを定量化した軌道コストを予め設定された数式から算出し、当該軌道コストが最小となる前記候補軌道を前記最適軌道として選択することを特徴とする請求項1記載のロボット。
【請求項3】
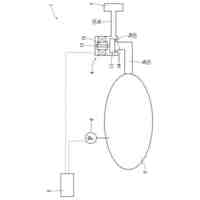
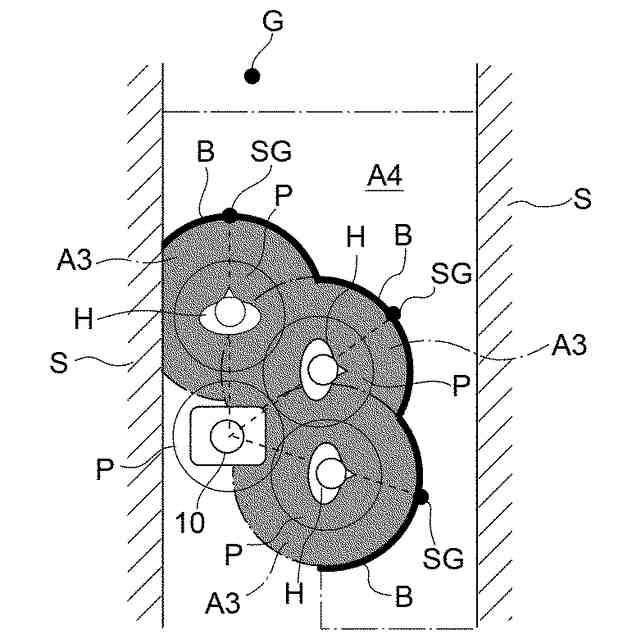
前記待機軌道生成部では、前記サブゴールとして、前記障害物との干渉が予想されない待機位置候補領域の境界線から、前記ロボットが移動可能で、且つ、前記ゴール地点に最も近い位置に設定されることを特徴とする請求項1記載のロボット。
【請求項4】
前記迂回軌道生成部では、前記サブゴールとして、前記ロボットと前記障害物を結ぶ直線と、当該障害物との干渉が予想されない迂回成立領域の境界線とが交わる位置に設定されることを特徴とする請求項1記載のロボット。
【請求項5】
周囲に存在する障害物の位置情報及び速度情報に基づき、現在地からゴール地点までの間で前記障害物を避けながらロボットを自律移動させるための実行軌道を生成する軌道計画装置において、
周囲の状況に応じて前記ロボットを前記ゴール地点に移動させるための軌道の候補となる候補軌道を複数生成する候補軌道探索部と、前記各候補軌道の中から最適となる最適軌道を選択して前記実行軌道とする最適軌道選択部とを備え、
前記候補軌道探索部は、前記ゴール地点に向かって前進し続ける前進的行動を行うための通常軌道を前記候補軌道として生成する通常軌道生成部と、前記通常軌道に対して前記ゴール地点から一旦遠ざかる後退的行動を行うための戦略的軌道を前記候補軌道として生成する戦略的軌道生成部とを備え、
前記戦略的軌道生成部は、前記通常軌道から外れた地点で前記障害物との干渉が予想されないサブゴールを設定し、当該サブゴールに移動して一旦待機した後で前記ゴール地点に向かう待機軌道を前記戦略的軌道として生成する待機軌道生成部と、前記サブゴールを設定し、当該サブゴールを経由して前記ゴール地点に向かう迂回軌道を前記戦略的軌道として生成する迂回軌道生成部とを備えたことを特徴とすることを特徴とする軌道計画装置。
【請求項6】
周囲に存在する障害物の位置情報及び速度情報に基づき、現在地からゴール地点までの間で前記障害物を避けながらロボットを自律移動させるための実行軌道を生成する軌道計画装置のプログラムにおいて、
周囲の状況に応じて前記ロボットを前記ゴール地点に移動させるための軌道の候補となる候補軌道を複数生成する候補軌道探索部と、前記各候補軌道の中から最適となる最適軌道を選択して前記実行軌道とする最適軌道選択部としてコンピュータを機能させ、
前記候補軌道探索部は、前記ゴール地点に向かって前進し続ける前進的行動を行うための通常軌道を前記候補軌道として生成する通常軌道生成部と、前記通常軌道に対して前記ゴール地点から一旦遠ざかる後退的行動を行うための戦略的軌道を前記候補軌道として生成する戦略的軌道生成部とを備え、
前記戦略的軌道生成部は、前記通常軌道から外れた地点で前記障害物との干渉が予想されないサブゴールを設定し、当該サブゴールに移動して一旦待機した後で前記ゴール地点に向かう待機軌道を前記戦略的軌道として生成する待機軌道生成部と、前記サブゴールを設定し、当該サブゴールを経由して前記ゴール地点に向かう迂回軌道を前記戦略的軌道として生成する迂回軌道生成部とを備えたことを特徴とすることを特徴とする軌道計画装置のプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、現在地から目的地までの間に存在する各障害物との将来的な干渉を回避するための軌道計画を適切に行いながら目的地に向かって自律移動するロボットと、当該ロボットに適用される軌道計画装置及びそのプログラムに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
近時において、人間との共存環境下で自律的に移動可能となる様々な自律移動ロボットが出現し、当該自律移動ロボットについて、周囲の障害物を避けながら目的地に移動させるための軌道計画が盛んに研究されている。これまで本発明者らは、人間への意図的な接近や双腕アームによる接触等の働きかけを含む近接移動と、進路示唆により相互に譲り合う回避移動を合わせた統合的軌道計画システムを提案している(特許文献1、2等参照)。
【先行技術文献】
【特許文献】
【0003】
特開2019-84641号公報
特開2020-46759号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
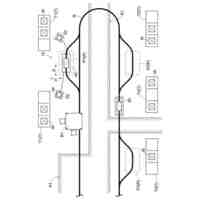
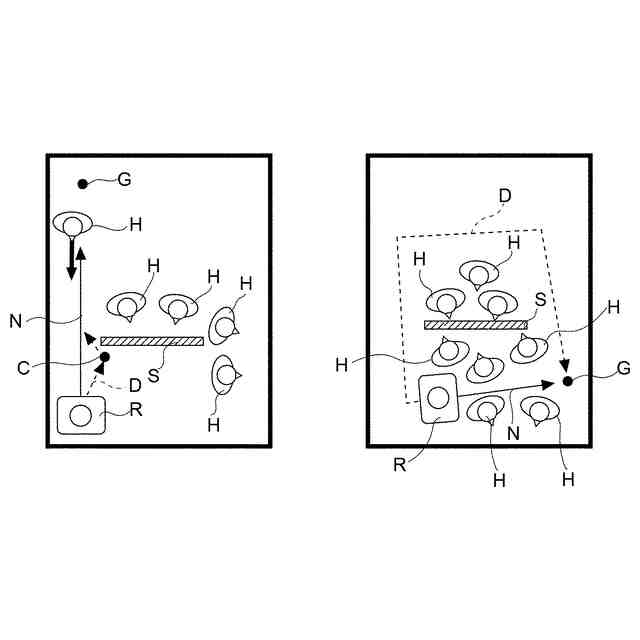
前記統合的軌道計画システムにあっては、人間に対する接近、接触等の能動的働きかけを駆使し、何とかして目的地に向かい、前進し続ける前進的行動を行うことを基本原理としている。しかしながら、例えば、図4の左右の各場面に示されるように、目的地Gに向かって自律移動するロボットRと人間Hとが共存する環境下において、前記統合的軌道計画システムで計画された前進的行動による通常軌道N(同各図中実線)よりも、戦略的に待機や迂回をして、一旦、目的地Gから遠ざかる行動である後退的行動による戦略的軌道D(同各図中破線)を採ることが有用となるケースもある。つまり、例えば、図4中左側の図の場面のように、狭い通路や人間Hが多く存在する混雑環境下では、ロボットRが地点Cで止まって人間Hの進路を空け、人間Hを先に通すような後退的行動の方が効率的にロボットRを移動できるケースがあり得る。また、同図中右側の図の場面のように、ロボットRが、能動的働きかけを伴う通常軌道Nにより、目的地G方向を塞いている人間Hを連続して移動させるよりも、ロボットRが後方に下がって大回りする戦略的軌道Dに沿って目的地Gを目指す後退的行動を行う方が、人間Hに与える影響が少なく、人間Hを移動させるための時間を含めると目的地Gへの到着時間が早くなるケースもあり得る。一方、状況によっては、人間Hに対するロボットRの近接移動や能動的働きかけを行う前進的行動が有効となるケースも当然ある。しかしながら、これまで、前進的行動と後退的行動を同一指標で評価し、効率面や周囲の人間に与える影響等から、前進的行動と後退的行動の何れかに基づく最適な軌道を選択する統合的軌道計画システムは未だ提案されていない。
【0005】
本発明は、このような課題に着目して案出されたものであり、その目的は、能動的働きかけを駆使する前進的行動と、戦略的な待機や迂回を伴う後退的行動とを必要に応じて適切に選択する軌道計画を可能にするロボット、軌道計画装置及びプログラムを提供することにある。
【課題を解決するための手段】
【0006】
前記目的を達成するため、本発明は、主として、周囲に存在する障害物を避けながら自律移動するロボットにおいて、前記障害物の位置情報及び速度情報を検出する検出装置と、当該検出装置の検出結果から、前記障害物との干渉可能性を推定して前記自律移動を制御する制御装置とを備え、前記制御装置は、現在地からゴール地点までの間の前記ロボットの軌道計画を行う軌道計画部と、当該軌道計画部での軌道計画によって特定された実行軌道に沿って前記ロボットを移動させるように動作指令する動作指令部とを備え、前記軌道計画部は、周囲の状況に応じて前記ロボットを前記ゴール地点に移動させるための軌道の候補となる候補軌道を複数生成する候補軌道探索部と、前記各候補軌道の中から最適となる最適軌道を選択して前記実行軌道とする最適軌道選択部とを備え、前記候補軌道探索部は、前記ゴール地点に向かって前進し続ける前進的行動を行うための通常軌道を前記候補軌道として生成する通常軌道生成部と、前記通常軌道に対して前記ゴール地点から一旦遠ざかる後退的行動を行うための戦略的軌道を前記候補軌道として生成する戦略的軌道生成部とを備え、前記戦略的軌道生成部は、前記通常軌道から外れた地点で前記障害物との干渉が予想されないサブゴールを設定し、当該サブゴールに移動して一旦待機した後で前記ゴール地点に向かう待機軌道を前記戦略的軌道として生成する待機軌道生成部と、前記サブゴールを設定し、当該サブゴールを経由して前記ゴール地点に向かう迂回軌道を前記戦略的軌道として生成する迂回軌道生成部とを備える、という構成を採っている。
【発明の効果】
【0007】
本発明によれば、周囲の障害物の状況に応じて、前進的行動、後退的行動のそれぞれに基づく候補軌道が生成され、その中から、移動効率やロボットの移動に際して障害となる周囲の人間への影響とが考慮された最適軌道を決定することができる。これにより、ロボットが、人間と同じ場面に立った時に人間のような考えによる移動判断を行うことが可能になり、ロボットと人間との調和やロボットに対する社会性の獲得が期待できる。
【図面の簡単な説明】
【0008】
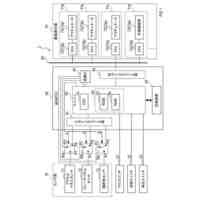
本実施形態に係るロボットの動作制御に関連する構成のみを概略的に表したブロック図である。
待機軌道生成部での待機軌道の生成を説明するための概念図である。
迂回軌道生成部での迂回軌道の生成を説明するための概念図である。
ロボットの前進的行動と後退的行動を説明するための概念図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について図面を参照しながら説明する。
【0010】
図1には、本実施形態に係るロボットの動作制御に関連する構成のみを概略的に表したブロック図が示されている。本実施形態のロボット10は、現在地から予め設定された目的地となるゴール地点に向かって自律的に移動する自律移動ロボットとして機能し、移動途中で周囲に存在する障害物との干渉が予想される場合、当該干渉を避けるための各種動作を行いながら移動するようになっている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社豊田自動織機
無人走行体
2か月前
株式会社クボタ
作業車
1か月前
アズビル株式会社
電圧出力回路
1か月前
アズビル株式会社
流量制御装置
20日前
ミネベアミツミ株式会社
入力装置
11日前
トヨタ自動車株式会社
自動走行搬送車
19日前
エイブリック株式会社
ボルテージレギュレータ
19日前
株式会社クボタ
操作機構及び作業車
1か月前
株式会社クボタ
故障診断装置
18日前
株式会社デンソー
制御装置
24日前
株式会社デンソー
制御装置
24日前
リックス株式会社
状態検出装置
14日前
日本プラスト株式会社
節度感付加装置
1か月前
株式会社デンソー
減圧弁制御装置
1か月前
株式会社オリジン
電源装置
1か月前
株式会社GSユアサ
電力変換装置
27日前
株式会社オリジン
電源装置
1か月前
村田機械株式会社
搬送車システム
4日前
株式会社デンソー
電子制御装置
1か月前
株式会社豊田自動織機
車両用の電動圧縮機
2か月前
川崎重工業株式会社
要因分析装置及び要因分析方法
24日前
THK株式会社
編集装置及び編集方法
1か月前
THK株式会社
編集装置及び編集方法
1か月前
東洋電装株式会社
移動検出装置および鞍乗車両
26日前
国立大学法人 名古屋工業大学
パラメータ探索空間算出方法
1か月前
株式会社ディスコ
加工装置
1か月前
村田機械株式会社
搬送車システム
2か月前
株式会社FUJI
暖機運転システムを備えた工作機械
1か月前
村田機械株式会社
走行車システム
1か月前
株式会社デンソー
ペダル装置
24日前
愛三工業株式会社
弁システム
1か月前
株式会社デンソー
ペダル装置
1か月前
DMG森精機株式会社
工作機械
1か月前
八重洲無線株式会社
回動つまみの回動軸への取り付け機構
1か月前
多摩川精機株式会社
突入電流防止回路
4日前
株式会社ダイフク
無人航空機の搬送システム
26日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ