TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024024707
公報種別
公開特許公報(A)
公開日
2024-02-26
出願番号
2022127511
出願日
2022-08-10
発明の名称
無人走行体
出願人
株式会社豊田自動織機
代理人
主分類
G05D
1/43 20240101AFI20240216BHJP(制御;調整)
要約
【課題】充電装置の電源が入っていなくても損傷を受けることなく充電装置からの離脱が可能な無人走行体の提供にある。
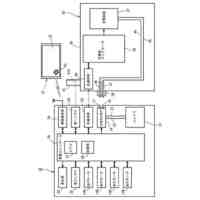
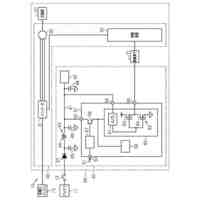
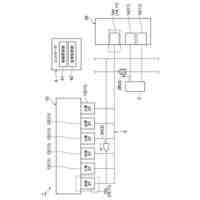
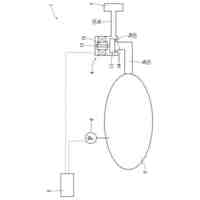
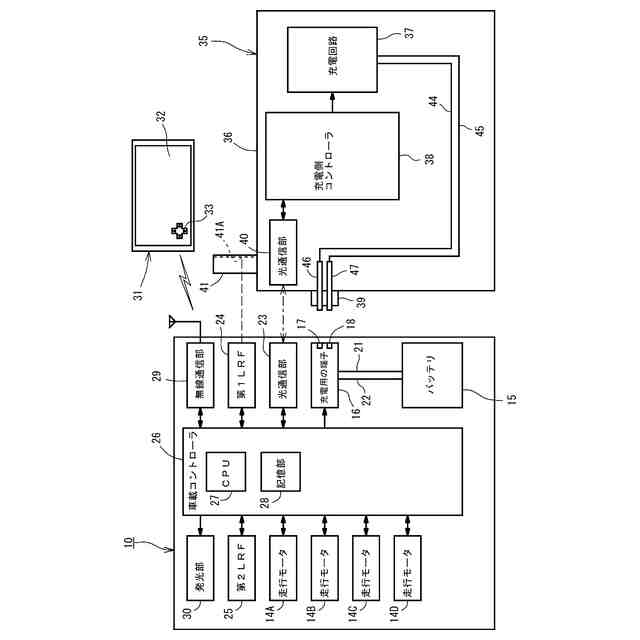
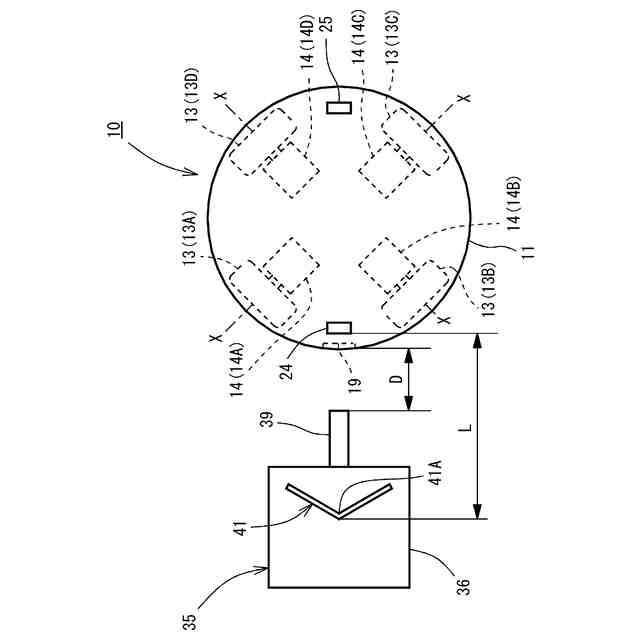
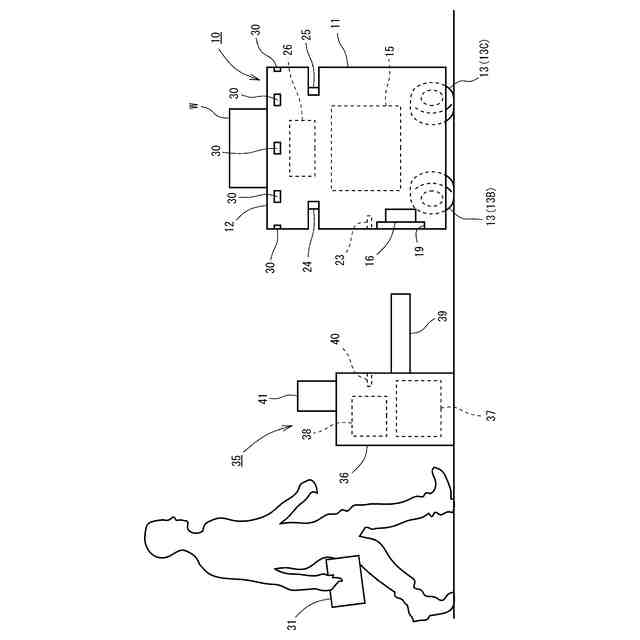
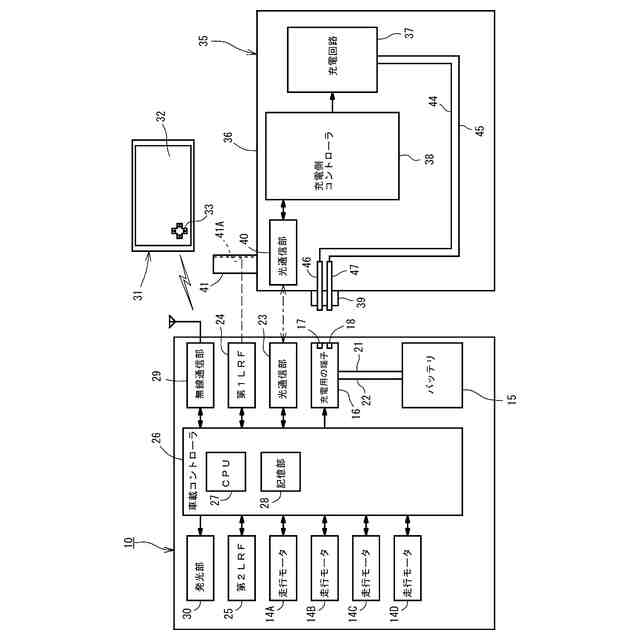
【解決手段】走行体本体と、走行体本体に備えられる複数の駆動輪と、駆動輪毎に備えられ、駆動輪を駆動する走行モータ14と、走行モータ14を制御するコントローラと、走行体本体に収容される充電可能なバッテリ15と、充電装置35が備える充電端子と接続可能であって、バッテリ15の充電のための充電用の端子16と、障害物を検出可能な障害物検出センサと、を有する無人走行体において、障害物検出センサは、充電装置35が備える特定形状部を検出可能であり、コントローラは、走行体本体の充電装置35からの離脱時に、走行体本体から特定形状部までの距離が予め設定した閾値以上となるまで、走行体本体が充電装置35から直線的に離脱させるように走行モータ14を制御する。
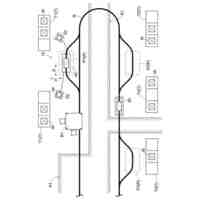
【選択図】 図3
特許請求の範囲
【請求項1】
走行体本体と、
前記走行体本体に備えられる複数の駆動輪と、
前記駆動輪毎に備えられ、前記駆動輪を駆動する走行モータと、
前記走行モータを制御するコントローラと、
前記走行体本体に収容される充電可能なバッテリと、
充電装置が備える充電端子と接続可能であって、前記バッテリの充電のための充電用の端子と、
障害物を検出可能な障害物検出センサと、を有する無人走行体において、
前記障害物検出センサは、前記充電装置が備える特定形状部を検出可能であり、
前記コントローラは、
前記走行体本体の前記充電装置からの離脱時に、
前記走行体本体から前記特定形状部までの距離が予め設定した閾値以上となるまで、前記走行体本体と前記充電端子との距離が可及的に拡大する方向へ向けて前記走行体本体を前記充電装置から直線的に離脱させるように前記走行モータを制御することを特徴とする無人走行体。
続きを表示(約 440 文字)
【請求項2】
前記走行体本体は、前記コントローラと接続され、報知機能を備える報知部を有し、
前記コントローラは、前記走行体本体の離脱時に前記報知部を作動させるように制御することを特徴とする請求項1記載の無人走行体。
【請求項3】
前記コントローラは、前記走行体本体の離脱時に、前記障害物検出センサが前記特定形状部を見失ったとき、前記走行体本体の離脱を停止するように前記走行モータを制御することを特徴とする請求項1又は2記載の無人走行体。
【請求項4】
前記走行体本体は、前記走行モータの回転数を用いて前記走行体本体の前記充電装置からの離脱距離を推定するオドメトリを有し、
前記コントローラは、前記走行体本体の離脱時に、前記障害物検出センサが前記特定形状部を見失ったとき、前記オドメトリにより推定された前記離脱距離に基づいて離脱を継続するように前記走行モータを制御することを特徴とする請求項1又は2記載の無人走行体。
発明の詳細な説明
【技術分野】
【0001】
この発明は、電動によって無人走行を行う無人走行体に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
無人走行体に関係する従来技術として、例えば、特許文献1に開示された自律走行体装置が知られている。特許文献1に開示された自律走行体装置は、自走可能な走行体と、充電回路を備えた充電装置と、を具備する。走行体は、本体ケースと、駆動輪と、この駆動輪を駆動させるモータと、前方の物体を検出する物体検出手段と、モータの駆動を制御する制御手段と、二次電池と、二次電池に電気的に接続された充電用の端子と、を備える。また、充電装置は、充電用の端子と接続される充電端子と、充電端子と電気的に接続され二次電池を充電する充電回路と、を備える。
【0003】
制御手段は、走行体の端子を充電装置の充電端子に対して接続した状態から走行体を充電装置に対して離脱させる際に、充電装置に対する移動距離が第1の所定距離未満で物体検出手段により障害物を検出したときには充電装置へ走行体が戻るようにモータの駆動を制御する。因みに、走行体が充電装置に対して離脱する際に、走行体は充電装置からの信号を受信する。そして、制御手段が充電装置に走行体が戻るように判断した場合に充電装置は信号の出力を停止する。
【先行技術文献】
【特許文献】
【0004】
特開2016-045599号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に開示された自律走行体装置では、走行体が充電装置に対して離脱する際に、充電装置からの信号を受信するので、充電装置の電源が入っていることが必要であるという問題がある。また、全方向に移動可能な無人走行体では、充電装置の充電端子に無人走行体の充電用の端子が接触した状態で充電が行われる。そして、充電後に、充電装置の充電端子に無人走行体の充電用の端子が接触した状態のままで無人走行体が旋回すると、充電装置の充電端子および無人走行体の充電用の端子が損傷したり、無人走行体の外周面が充電端子により傷付いたりするおそれがある。
【0006】
本発明は上記の問題点に鑑みてなされたもので、本発明の目的は、充電装置の電源が入っていなくても損傷を受けることなく充電装置からの離脱が可能な無人走行体の提供にある。
【課題を解決するための手段】
【0007】
上記の課題を解決するために、本発明は、走行体本体と、前記走行体本体に備えられる複数の駆動輪と、前記駆動輪毎に備えられ、前記駆動輪を駆動する走行モータと、前記走行モータを制御するコントローラと、前記走行体本体に収容される充電可能なバッテリと、充電装置が備える充電端子と接続可能であって、前記バッテリの充電のための充電用の端子と、障害物を検出可能な障害物検出センサと、を有する無人走行体において、前記障害物検出センサは、前記充電装置が備える特定形状部を検出可能であり、前記コントローラは、前記走行体本体から前記特定形状部までの距離が予め設定した閾値以上となるまで、前記走行体本体と前記充電端子との距離が可及的に拡大する方向へ向けて前記走行体本体を前記充電装置から直線的に離脱させるように前記走行モータを制御することを特徴とする。
【0008】
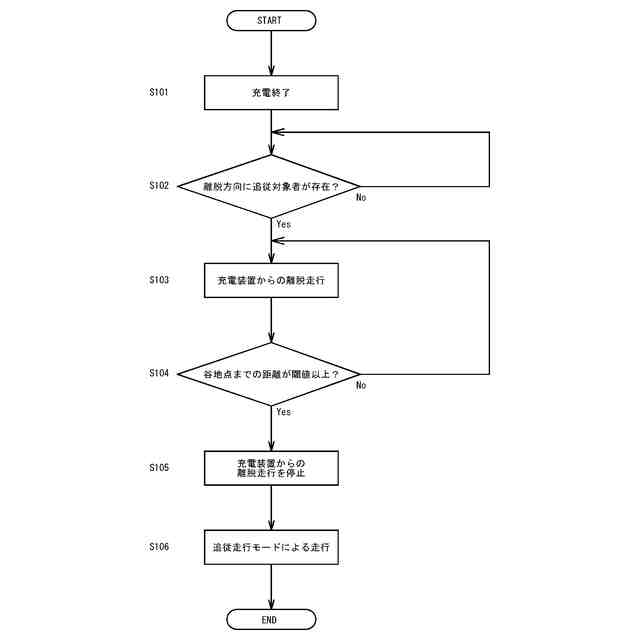
本発明では、走行体本体の充電装置から離脱では、走行体本体は、特定形状部から走行体本体までの距離が予め設定した閾値以上となるまで充電装置から直線的に離脱するので、走行体本体の充電用の端子や充電装置の充電端子が損傷することはない。また、走行体本体は、充電装置の電源が入っていなくても充電装置から離脱できる。
【0009】
また、上記の無人走行体において、前記走行体本体は、前記コントローラと接続され、報知機能を備える報知部を有し、前記コントローラは、前記走行体本体の離脱時に前記報知部を作動させるように制御する構成としてもよい。
この場合、走行体本体の離脱時に報知部が作動され、走行体本体が充電装置から離脱していることを周囲に報知する。無人走行体の周囲に作業者が存在すれば、作業者は走行体本体が充電装置から離脱していることを直ちに認識することができる。
【0010】
また、上記の無人走行体において、前記コントローラは、前記走行体本体の離脱時に、前記障害物検出センサが前記特定形状部を見失ったとき、前記走行体本体の離脱を停止するように前記走行モータを制御する構成としてもよい。
この場合、障害物検出センサが走行体本体の離脱時に特定形状部を見失ったとき、コントローラは走行体本体の離脱を停止する。走行体本体が離脱を停止することで、他物体との干渉リスクを低減することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社豊田自動織機
無人走行体
2か月前
株式会社クボタ
作業車
1か月前
アズビル株式会社
流量制御装置
20日前
アズビル株式会社
電圧出力回路
1か月前
ミネベアミツミ株式会社
入力装置
11日前
トヨタ自動車株式会社
自動走行搬送車
19日前
エイブリック株式会社
ボルテージレギュレータ
19日前
株式会社クボタ
故障診断装置
18日前
株式会社クボタ
操作機構及び作業車
1か月前
リックス株式会社
状態検出装置
14日前
株式会社デンソー
制御装置
24日前
日本プラスト株式会社
節度感付加装置
1か月前
株式会社デンソー
制御装置
24日前
株式会社オリジン
電源装置
1か月前
株式会社GSユアサ
電力変換装置
27日前
株式会社オリジン
電源装置
1か月前
株式会社デンソー
減圧弁制御装置
1か月前
村田機械株式会社
搬送車システム
4日前
株式会社デンソー
電子制御装置
1か月前
株式会社豊田自動織機
車両用の電動圧縮機
2か月前
川崎重工業株式会社
要因分析装置及び要因分析方法
24日前
THK株式会社
編集装置及び編集方法
1か月前
THK株式会社
編集装置及び編集方法
1か月前
NTN株式会社
情報処理装置
2か月前
株式会社ディスコ
加工装置
1か月前
国立大学法人 名古屋工業大学
パラメータ探索空間算出方法
1か月前
村田機械株式会社
走行車システム
1か月前
東洋電装株式会社
移動検出装置および鞍乗車両
26日前
株式会社FUJI
暖機運転システムを備えた工作機械
1か月前
村田機械株式会社
搬送車システム
2か月前
株式会社デンソー
ペダル装置
24日前
株式会社デンソー
ペダル装置
1か月前
愛三工業株式会社
弁システム
1か月前
DMG森精機株式会社
工作機械
1か月前
株式会社ダイフク
無人航空機の搬送システム
26日前
多摩川精機株式会社
突入電流防止回路
4日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ