TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024023119
公報種別
公開特許公報(A)
公開日
2024-02-21
出願番号
2023003909
出願日
2023-01-13
発明の名称
情報処理装置
出願人
NTN株式会社
代理人
弁理士法人深見特許事務所
主分類
G05B
13/02 20060101AFI20240214BHJP(制御;調整)
要約
【課題】手作業での調整を行なうことなく適正パラメータを推定する。
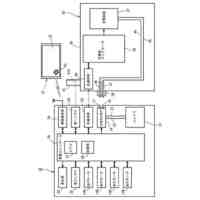
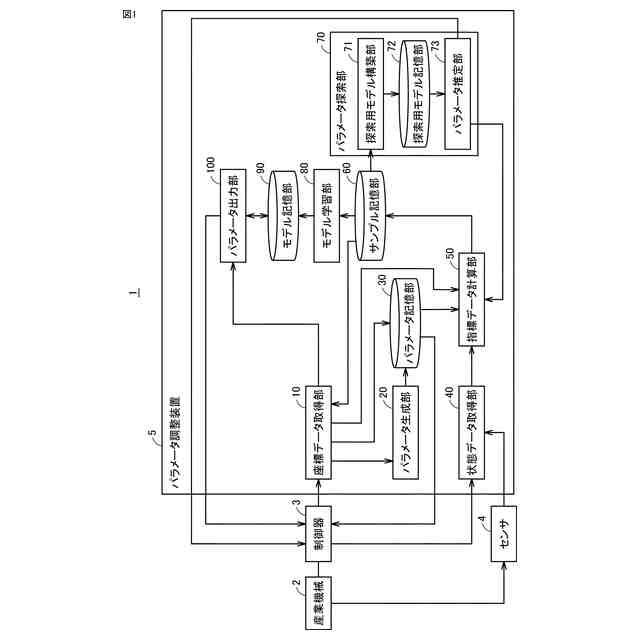
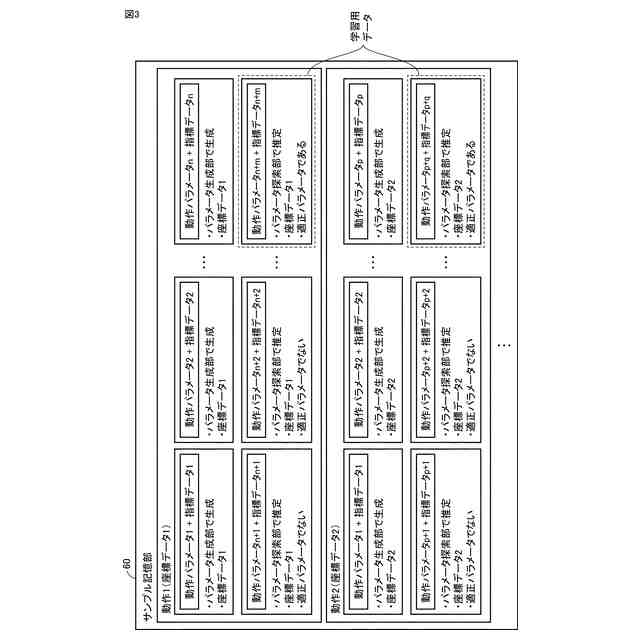
【解決手段】パラメータ調整装置(5)は、産業機械の座標データを取得する座標データ取得部(10)と、動作パラメータを生成するパラメータ生成部(20)と、動作パラメータを記憶するパラメータ記憶部(30)と、産業機械の状態データを取得する状態データ取得部(40)と、状態データに基づいて指標データを計算する指標データ計算部(50)と、動作パラメータと指標データとを紐付けたサンプルデータを記憶するサンプル記憶部(60)と、サンプルデータを用いて適正と推定される動作パラメータを探索するパラメータ探索部(70)と、適正と推定される動作パラメータと座標データとを紐付けた学習用データを用いて座標データから適正パラメータを推定するための学習モデルを生成するモデル学習部(80)とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
制御器によって制御される駆動装置の情報処理装置であって、
前記駆動装置の動作座標を示す座標データを外部から取得する座標データ取得部と、
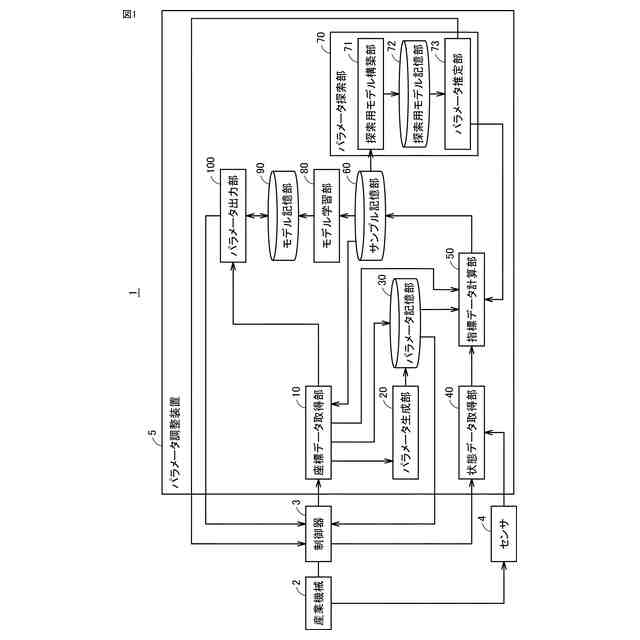
前記制御器による前記駆動装置の制御に用いられる動作パラメータを生成するパラメータ生成部と、
前記動作パラメータを記憶し、前記動作パラメータを含む動作指令を前記制御器に出力するパラメータ記憶部と、
前記動作パラメータによる動作中の前記駆動装置の状態を示す状態データを取得する状態データ取得部と、
前記動作パラメータの適否を判定するための指標となる指標データを前記状態データに基づいて計算する指標データ計算部と、
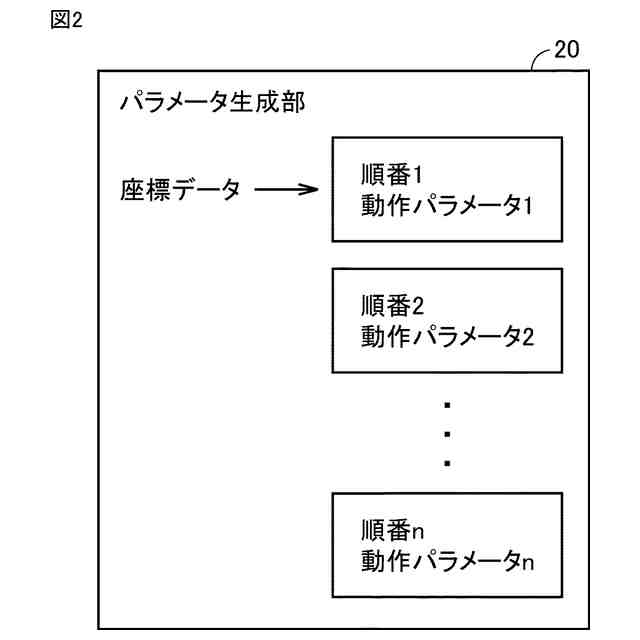
前記動作パラメータと前記指標データとを紐付けたサンプルデータを記憶するサンプル記憶部と、
前記指標データに基づいて適正と推定される動作パラメータを前記サンプルデータを用いて探索するパラメータ探索部と、
前記パラメータ探索部によって適正と推定される動作パラメータと前記座標データとを紐付けた学習用データを用いて、前記座標データの動作を行なうのに適した動作パラメータである適正パラメータを前記座標データから推定するための学習モデルを生成するモデル学習部とを備える、情報処理装置。
続きを表示(約 1,500 文字)
【請求項2】
前記モデル学習部が生成した前記学習モデルを記憶するモデル記憶部と、
前記座標データ取得部が取得した前記座標データを、前記モデル記憶部が記憶している前記学習モデルに入力することで、前記適正パラメータを出力するパラメータ出力部とをさらに備える、請求項1に記載の情報処理装置。
【請求項3】
前記パラメータ探索部は、前記パラメータ探索部によって適正と推定される動作パラメータで前記駆動装置を制御するように前記制御器に指令し、
前記状態データ取得部は、前記パラメータ探索部によって適正と推定される動作パラメータで前記駆動装置を動作させた場合の前記駆動装置の状態を示す探索状態データを取得し、
前記指標データ計算部は、前記探索状態データに基づいて前記指標データを計算し、
前記サンプル記憶部は、前記探索状態データに基づいて適正と判定される動作パラメータと前記座標データとを紐付けたデータを前記学習用データとして記憶し、
前記モデル学習部は、前記サンプル記憶部に記憶された前記学習用データを用いて前記学習モデルを生成する、請求項1または2に記載の情報処理装置。
【請求項4】
前記状態データ取得部は、前記パラメータ探索部によって適正と推定される動作パラメータで前記駆動装置を動作させた場合の前記駆動装置の状態を示す探索状態データを取得し、
前記指標データ計算部は、前記探索状態データに基づいて2種類以上の指標を計算して、計算された前記2種類以上の指標の組合せを前記指標データとし、
前記パラメータ探索部は、前記指標データを構成するそれぞれの指標に基づいて、多目的最適化手法を用いて適正と判定される動作パラメータを推定する、請求項1または2に記載の情報処理装置。
【請求項5】
前記パラメータ生成部は、前記パラメータ探索部のパラメータ探索方法に応じて設定された第1所定数の動作パラメータを生成する、請求項1または2に記載の情報処理装置。
【請求項6】
前記モデル学習部は、前記モデル学習部のモデル学習方法に応じて設定された第2所定数の学習用データが前記サンプル記憶部に記憶された場合に、前記第2所定数の前記学習用データを用いて前記学習モデルを生成する、請求項1または2に記載の情報処理装置。
【請求項7】
前記パラメータ探索部は、
前記サンプル記憶部が記憶している前記サンプルデータを用いて、前記動作パラメータから前記指標データを推定するための探索用モデルを生成する探索用モデル構築部と、
前記探索用モデルを記憶する探索用モデル記憶部と、
前記探索用モデルを用いて推定される前記指標データに基づいて適正と推定される動作パラメータを探索するパラメータ推定部とを備える、請求項1または2に記載の情報処理装置。
【請求項8】
前記状態データ取得部は、駆動装置からトルクデータを取得し、
前記指標データ計算部は、前記トルクデータから計算したトルクの振動振幅値とトルク波形の減衰率の線形結合を駆動装置の位置決め後の残留振動を示す指標とする、請求項1または2に記載の情報処理装置。
【請求項9】
前記モデル学習部は、前記サンプル記憶部が記憶している学習用データを複数のグループに分割する分類モデルと、前記複数のグループに対応してそれぞれ設けられる複数の回帰モデルとを生成する、請求項1または2に記載の情報処理装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、生産設備の位置決めに用いられる産業機械などの駆動装置の動作の制御に用いられる動作パラメータを、自動で調整する情報処理装置に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
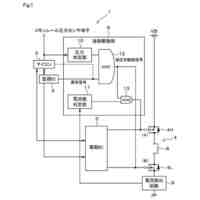
特許文献1は、産業機械に対する動作指令に応じて、適切な制御パラメータを適用するパラメータ調整装置を開示する。特許文献1に記載のパラメータ調整装置は、産業機械の動作における速度、加速度、ジャークの少なくとも1つの指令を含む状態データ、および産業機械を制御する制御器から取得した該動作の最適パラメータに基づいて、状態データから最適な制御パラメータを推定するためのモデルを機械学習によって生成し、動作指令に応じて適した動作パラメータをモデルから取得し、適用する。
【先行技術文献】
【特許文献】
【0003】
特開2020-35159号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
多軸ロボット等の産業機械の動作を制御する上で、産業機械の動作時の振動、および軌道のズレを修正するためには、ゲインパラメータを始めとした制御パラメータの調整を行なうことが求められる。一方、制御パラメータを適切に調整するには、制御およびセンサに関する知識が必要となる上に、産業機械には個体差があるため、それらに対応できるだけの経験も必要となることから、制御パラメータの調整は未だに手作業での試行錯誤によって行なわれているのが現状である。
【0005】
特許文献1は、工作機械、ロボット等の産業機械の速度、加速度、ジャーク等の指令に応じて、より適した制御パラメータを設定するパラメータ調整装置を提案している。しかし、たとえば、予め設定した座標間の位置決め等の動作において、動作時間の短縮を目的に、産業機械に可能な限り早く動作することを望む場合、速度、加速度、ジャークについても、適切な値に調整する手間が必要となる。
【0006】
特に、制御対象である位置決め装置の剛性や振動特性が、位置決め装置の現在の位置や姿勢によって大きく変わる場合、位置決め可能な全領域に対して固定された1組の制御パラメータを用いると、条件の悪い姿勢を考慮しなくてはならないため、全体として動作時間の短縮が困難である。
【0007】
本開示は、上記の課題を解決するためになされたものであって、その目的は、従来のような手作業での試行錯誤による調整を行なうことなく、駆動装置の動作を行なうのに適した動作パラメータ(制御パラメータ)を推定することである。
【課題を解決するための手段】
【0008】
本開示による情報処理装置は、制御器によって制御される駆動装置の情報処理装置であって、駆動装置の動作座標を示す座標データを外部から取得する座標データ取得部と、制御器による駆動装置の制御に用いられる動作パラメータを生成するパラメータ生成部と、動作パラメータを記憶するパラメータ記憶部と、動作パラメータによる動作中の駆動装置の状態を示す状態データを取得する状態データ取得部と、動作パラメータの適否を判定するための指標となる指標データを状態データに基づいて計算する指標データ計算部と、動作パラメータと指標データとを紐付けたサンプルデータを記憶するサンプル記憶部と、指標データに基づいて適正と推定される動作パラメータをサンプルデータを用いて探索するパラメータ探索部と、パラメータ探索部によって適正と推定される動作パラメータと座標データとを紐付けた学習用データを用いて、座標データの動作を行なうのに適した動作パラメータである適正パラメータを座標データから推定するための学習モデルを生成するモデル学習部とを備える。
【発明の効果】
【0009】
本開示によれば、座標データ取得部に座標データを入力することによって、動作パラメータが生成され、その動作パラメータによる状態データから指標データが計算され、指標データに基づいて適正と推定される動作パラメータが探索される。そして、適正と推定される動作パラメータと座標データとを紐付けた学習用データを用いて、座標データから適正パラメータを推定するための学習モデルが生成される。すなわち、情報処理装置に座標データを入力するだけで、座標データから適正パラメータを推定するための学習モデルを生成することができる。そのため、従来のような手作業での試行錯誤によるパラメータ調整を行なうことなく、この学習モデルに座標データを入力するだけで、座標データの動作を行なうのに適した動作パラメータを推定することができる。
【図面の簡単な説明】
【0010】
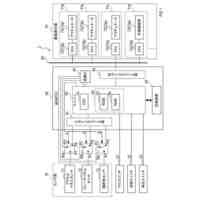
パラメータ調整装置(情報処理装置)を備える制御システムの全体構成の一例を模式的に示す図である。
パラメータ生成の一例を示す図である。
サンプルデータの一例を示す図である。
モデル学習部の学習の一例を模式的に示す図(その1)である。
学習モデルを生成する処理手順の一例を示すフローチャートである。
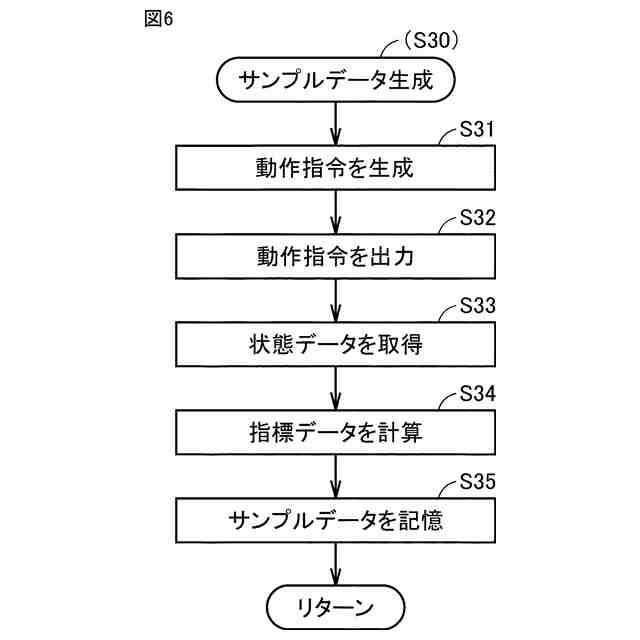
サンプルデータを生成する処理の詳細な流れの一例を示すフローチャートである。
学習用データを生成する処理の詳細な流れの一例を示すフローチャートである。
適正パラメータの出力の一例を示す図(その1)である。
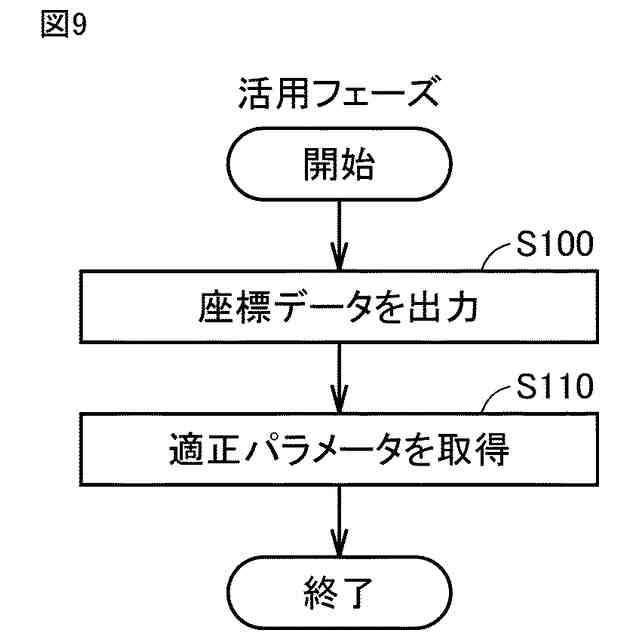
適正パラメータを出力する処理手順の一例を示す。
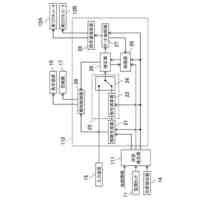
パラメータ調整装置の構成の一例を模式的に示す図(その1)である。
パラメータ調整装置の構成の一例を模式的に示す図(その2)である。
モデル学習部の学習の一例を模式的に示す図(その2)である。
適正パラメータの出力の一例を示す図(その2)である。
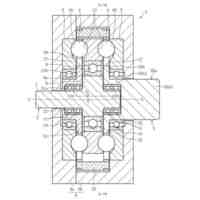
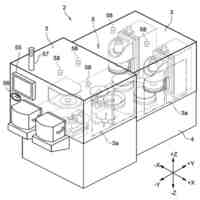
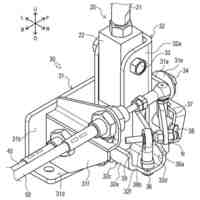
産業機械の構成の一例を示す図である。
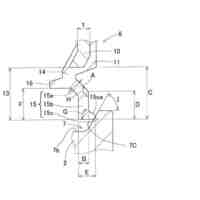
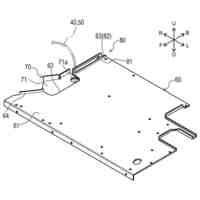
角度調整装置の構成の一例を示す図である。
パラレルリンク機構の構成の一例を示す斜視図である。
一組のリンク機構を直線で表現した図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
NTN株式会社
圧粉磁心
4日前
NTN株式会社
転がり軸受
12日前
NTN株式会社
動力伝達装置
6日前
NTN株式会社
フォイル軸受
13日前
NTN株式会社
絶縁転がり軸受
6日前
NTN株式会社
絶縁転がり軸受
20日前
NTN株式会社
細胞組織の製造方法
21日前
NTN株式会社
ボールねじ装置および直動機構
11日前
NTN株式会社
ボールねじ装置および直動機構
11日前
NTN株式会社
機械部品、転がり軸受及びボールねじ
13日前
NTN株式会社
動圧軸受及びこれを備えた流体動圧軸受装置
13日前
NTN株式会社
軸受装置及びその軸受装置を備えたスピンドル装置
6日前
NTN株式会社
軸受装置
17日前
NTN株式会社
ディスクバルブの製造方法
6日前
株式会社豊田自動織機
無人走行体
2か月前
株式会社ディスコ
加工装置
2か月前
川崎重工業株式会社
制御装置
2か月前
株式会社クボタ
作業車
1か月前
アズビル株式会社
流量制御装置
20日前
アズビル株式会社
電圧出力回路
1か月前
ミネベアミツミ株式会社
入力装置
11日前
トヨタ自動車株式会社
自動走行搬送車
19日前
エイブリック株式会社
ボルテージレギュレータ
19日前
株式会社クボタ
操作機構及び作業車
1か月前
株式会社クボタ
故障診断装置
18日前
リックス株式会社
状態検出装置
14日前
株式会社デンソー
制御装置
24日前
日本プラスト株式会社
節度感付加装置
1か月前
株式会社デンソー
制御装置
24日前
CKD日機電装株式会社
むだ時間を用いた高調波除去
2か月前
株式会社デンソー
減圧弁制御装置
1か月前
株式会社オリジン
電源装置
1か月前
株式会社GSユアサ
電力変換装置
27日前
株式会社オリジン
電源装置
1か月前
村田機械株式会社
搬送車システム
4日前
株式会社デンソー
電子制御装置
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ