TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024022257
公報種別
公開特許公報(A)
公開日
2024-02-16
出願番号
2022125702
出願日
2022-08-05
発明の名称
むだ時間を用いた高調波除去
出願人
CKD日機電装株式会社
代理人
主分類
G05B
11/36 20060101AFI20240208BHJP(制御;調整)
要約
【課題】むだ時間を利用した高調波除去
【解決手段】
むだ時間をコントローラの一部として利用した制振法であるポジカスト制御は、除去したい振動の半周期分のむだ時間に基づく方式であり、非減衰振動に対しては、基本波だけでなく奇数次高調波をすべて除去することができる。本発明は、これに加えて偶数次高調波も除去可能な方法を提供する。本発明は、除去したい振動の1周期分のむだ時間に基づく方法である。
【選択図】図3
特許請求の範囲
【請求項1】
入力信号を指定時間だけ遅らせるための遅延要素を具備し、前記指定時間を、除去したい振動の周期の倍数に設定すること、および前記遅延要素によって遅らせた信号を前記入力信号から引算することを特徴とする振動除去方式
続きを表示(約 54 文字)
【請求項2】
請求項1の方式において、必要な定常ゲインを得るために、積分計算を追加する方法
発明の詳細な説明
【技術分野】
【0001】
本発明は振動除去の方法に関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
むだ時間をコントローラとして用いた先駆的制振法にポジカスト制御(特許文献1、非特許文献1)がある。これは除去したい振動の半周期だけ目標値を遅らせて元の目標値に加算する操作に基づく。この制御法は、むだ時間を用いて連続時間制御系でデッドビート制御(有限時間で制御誤差を零にする制御)が行えることも示した。ポジカスト制御は、現在は入力整形または目標値整形(非特許文献2、非特許文献3など)とも呼ばれ、発展研究が続けられている。
【0003】
ポジカスト制御は次のように直観的に理解できる。線形システムの入力をu、出力をy、aとbを定数とするとき、数1(重ね合わせの原理)が成り立つ。
TIFF
2024022257000002.tif
7
23
システムの特性が時間変化しない場合、入力をある時間L遅らせると出力も単に時間L遅れるだけなので、数2が成り立つ。
TIFF
2024022257000003.tif
6
20
線形時不変システム(数1、数2を満たす)の出力が周期Tで正弦波状に振動しているとする。このとき入力を半周期T/2だけ遅らせて元の入力に加算すると(コントローラがこの操作を行う)、出力においても半周期遅れた出力が元の出力に加算される(数3)。
TIFF
2024022257000004.tif
3
38
よって位相が逆の正弦波が出力で加え合わされるので、出力を(半周期後に)零にすることができる。
【0004】
またポジカスト制御を極配置の観点から解釈すると次のようになる。純虚数の複素極s=±jβをもつ数4の非減衰振動系を考える。
TIFF
2024022257000005.tif
6
38
sはラプラス演算子であり、sは微分、1/sは積分の作用を表す。jは虚数単位である。
TIFF
2024022257000006.tif
6
12
Tは振動周期[s]、fは振動周波数[Hz]、βは振動角周波数[rad/s]である。数4のためのポジカストコントローラは数6で与えられる。
TIFF
2024022257000007.tif
5
34
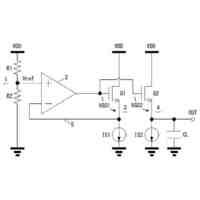
図1に制御系を示す(rは目標値、r’は整形された目標値である)。数6は、むだ時間要素を用いて振動の半周期だけ目標値を遅らせて元の目標値に加える働きをする。係数1/2は、目標値の高さが変わらないように定常状態(s=0)でのゲインを1にするためのものである。数6に数4の極s=±jβを代入し、数5と数7(オイラーの公式)を用いると数8を得る。
TIFF
2024022257000008.tif
3
19
TIFF
2024022257000009.tif
3
57
数8は、数4の極の位置に数6の零点があることを意味する。すなわち
TIFF
2024022257000010.tif
3
38
と表せる。よって数4の極と数6の零点がキャンセルしあい(極零点消去)、数4の振動が除去される。
【先行技術文献】
【特許文献】
【0005】
O.J.M. Smith, Dead Beat Response, Resonant Load, Control System and Method, US Patent 3051883, Aug.28, 1962
【非特許文献】
【0006】
O.J.M. Smith, Posicast Control of Damped Oscillatory Systems, Proceedings of the IRE, pp.1249-1255, 1957
W. Singhose, Command Shaping for Flexible Systems: A Review of the First 50 Years, International Journal of Precision Engineering and Manufacturing, Vol.10, No.4, pp.153-168, 2009
T. Singh, Optimal Reference Shaping for dynamical systems- Theory and Applications, CRC Press, 2010
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明では、数4の高調波を含んだ数10を考える。
TIFF
2024022257000011.tif
6
63
ここでβは基本波の角周波数、nβはn次高調波の角周波数である。数6のポジカストコントローラは、nが奇数のとき数11を満たすので、数10の基本波とすべての奇数次高調波を除去できることが分かる。
TIFF
2024022257000012.tif
3
76
しかし数6では偶数次の高調波は除去できない。本発明は同時に偶数次の高調波も除去可能な方法を提供する。
【課題を解決するための手段】
【0008】
本発明の方式は、振動周期Tと同じ時間だけ入力信号を遅らせた信号を、元の入力信号から引算する操作に基づく。これは数3のときと同様、直観的に数12のように理解できる。
TIFF
2024022257000013.tif
9
33
すなわち出力yが周期Tの正弦波の場合、y(t)とy(t-T)は同じ値をとるので引算すれば零になる。この操作(時間T遅らせて引く)を行う最も簡単なコントローラとして数13が考えられる(k2は係数)。
TIFF
2024022257000014.tif
3
13
しかし数13は定常状態(s=0)で0になってしまい十分でないので、積分器を追加した数14を考える。
TIFF
2024022257000015.tif
6
32
不定形の極限についてのロピタルの定理より、数14の定常ゲインは数15となる。よって係数k2を1/Tに選べば、この定常ゲインを1にすることができる。
TIFF
2024022257000016.tif
9
79
【0009】
数14に数10の極s=±jnβを代入し、数5と数7を用いると数16を得る。
TIFF
2024022257000017.tif
3
84
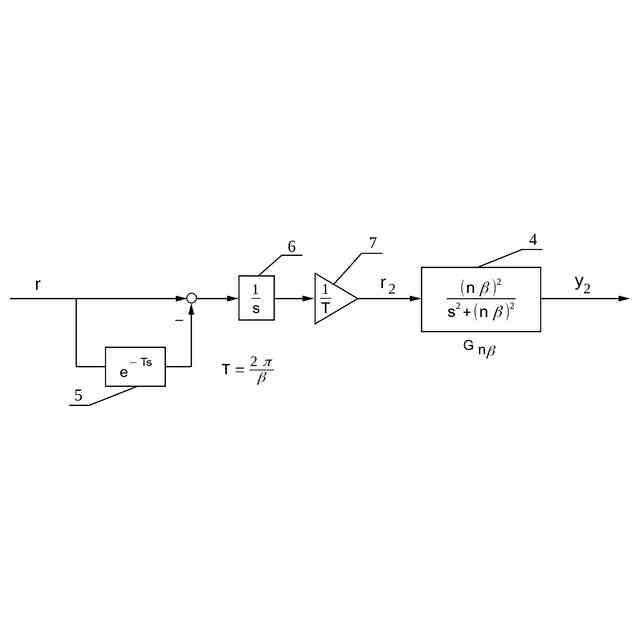
よって数14は自然数nに対して数10の極s=±jnβを極零点消去できる。本発明の方式を図3に示す。
【0010】
本発明の請求項では「前記指定時間(コントローラのむだ時間)を、除去したい振動の周期の倍数に設定する」と表現した。これは、コントローラのむだ時間がT=2π/βのとき除去される高調波の周期は2π/(nβ)なので、コントローラのむだ時間は高調波周期のn倍であることによる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社豊田自動織機
無人走行体
2か月前
株式会社ディスコ
加工装置
2か月前
株式会社クボタ
作業車
1か月前
川崎重工業株式会社
制御装置
2か月前
アズビル株式会社
流量制御装置
20日前
アズビル株式会社
電圧出力回路
1か月前
ミネベアミツミ株式会社
入力装置
11日前
トヨタ自動車株式会社
自動走行搬送車
19日前
エイブリック株式会社
ボルテージレギュレータ
19日前
株式会社クボタ
操作機構及び作業車
1か月前
株式会社クボタ
故障診断装置
18日前
日本プラスト株式会社
節度感付加装置
1か月前
株式会社デンソー
制御装置
24日前
リックス株式会社
状態検出装置
14日前
株式会社デンソー
制御装置
24日前
株式会社オリジン
電源装置
1か月前
CKD日機電装株式会社
むだ時間を用いた高調波除去
2か月前
株式会社デンソー
減圧弁制御装置
1か月前
株式会社オリジン
電源装置
1か月前
株式会社GSユアサ
電力変換装置
27日前
村田機械株式会社
搬送車システム
4日前
株式会社デンソー
電子制御装置
1か月前
株式会社豊田自動織機
車両用の電動圧縮機
2か月前
NTN株式会社
情報処理装置
2か月前
THK株式会社
編集装置及び編集方法
1か月前
川崎重工業株式会社
要因分析装置及び要因分析方法
24日前
THK株式会社
編集装置及び編集方法
1か月前
株式会社FUJI
暖機運転システムを備えた工作機械
1か月前
村田機械株式会社
走行車システム
1か月前
国立大学法人 名古屋工業大学
パラメータ探索空間算出方法
1か月前
株式会社ディスコ
加工装置
1か月前
東洋電装株式会社
移動検出装置および鞍乗車両
26日前
村田機械株式会社
搬送車システム
2か月前
株式会社デンソー
ペダル装置
1か月前
DMG森精機株式会社
工作機械
1か月前
株式会社デンソー
ペダル装置
24日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ