TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024042469
公報種別
公開特許公報(A)
公開日
2024-03-28
出願番号
2022147215
出願日
2022-09-15
発明の名称
パラメータ探索空間算出方法
出願人
国立大学法人 名古屋工業大学
代理人
主分類
G05B
13/02 20060101AFI20240321BHJP(制御;調整)
要約
【課題】従来技術は、実現可能な制御性能が制限される場合がある。また、広大な探索空間を算出するためには最適化問題の可解性判定を多数回行う必要があり、探索空間の算出時間が長大となる。
【解決手段】初期FBパラメータρ
ini
と、ρ
ini
に対して計算して求めた安定性H(ρ
ini
)を、初期データD
H
=(ρ
ini
;H(ρ
ini
))とし、推定の反復子i=1で初期化するステップ1、安定性が統計的分布に従うという仮定のもと安定性の推定H^(ρ)とその不確実性σ
2
(ρ)を計算するステップ2、獲得関数を計算し、獲得関数が最小となるFBパラメータρ
next
を次の探索点とするステップ3、ρ
next
と安定性H(ρ
next
)をD
H
に追加するステップ4を備え、i<n(反復上限回数)ならi=i+1でStep2へ戻り、i=nなら終了しH^(ρ)≧0の空間を探索空間Tとする。
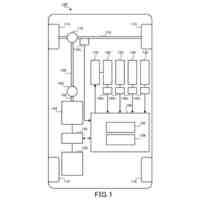
【選択図】図4
特許請求の範囲
【請求項1】
フィードバック制御パラメータの自動調整におけるパラメータ探索空間算出方法であって、初期フィードバックパラメータρ
ini
と、前記ρ
ini
に対して計算して求めた安定性H(ρ
ini
)を、初期データD
H
=(ρ
ini
;H(ρ
ini
))とし、推定の反復子iをi:=1として初期化するステップ1と、安定性が統計的分布に従うという仮定のもと安定性の推定H^(ρ)とその不確実性σ
2
(ρ)を計算するステップ2と、獲得関数を計算し、前記獲得関数が最小となるフィードバックパラメータρ
next
を次の探索点とするステップ3と、前記ρ
next
と安定性H(ρ
next
)を前記D
H
に追加するステップ4と、を備え、前記iが反復上限回数n未満ならばi:=i+1としてStep2へ戻り、i=nとなったら終了して、前記H^(ρ)≧0となる空間を、探索空間Tとすることを特徴とするパラメータ探索空間算出方法。
続きを表示(約 440 文字)
【請求項2】
前記ステップ2において、前記安定性の推定H^(ρ)が従うと仮定する統計的分布はガウス分布であることを特徴とする請求項1に記載のパラメータ探索空間算出方法。
【請求項3】
H(ρ
1
)、H(ρ
2
)、…H(ρ
N
)が既知であるとき、H(ρ
1
)、H(ρ
2
)、…H(ρ
N
)がガウス過程に従うことを特徴とする請求項1に記載の制御パラメータ探索空間算出方法。
【請求項4】
前記ステップ3において、前記獲得関数は所定の安定性を満たすパラメータ空間の境界を推定する関数であることを特徴とする請求項1から3の何れか1項に記載のパラメータ探索空間算出方法。
【請求項5】
前記ステップ3において、前記獲得関数の最小化はベイズ最適化によって行うことを特徴とする請求項1から3の何れか1項に記載のパラメータ探索空間算出方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、フィードバック制御パラメータの自動調整におけるパラメータ探索空間算出方法に関する。
続きを表示(約 3,300 文字)
【背景技術】
【0002】
高速・高精度性能が要求される産業用サーボ制御において、自動的かつ短時間での制御調整を可能とする自動調整技術は、所望のサーボ性能を獲得・維持し、生産性を向上する上で重要な制御設計技術の一つである。自動調整におけるパラメータ探索は一般に最適化アルゴリズムに基づいて行われ、様々な自動調整法が提案されている。
フィードバック(FB)制御パラメータを調整する場合、パラメータ探索は制御系の安定性の変化を伴うため、安定性を考慮した自動調整が求められる。FB制御パラメータの自動調整に関する先行研究の殆どはパラメータ探索空間の設定方法が明示されておらず、実際は探索空間を狭小な空間に制限するなどの試行錯誤的な工夫が必要となる。しかし、探索空間を狭小空間に制限することは実現可能な制御性能の制限につながるため好ましくない。
【0003】
上述の問題に着目して、非特許文献1ではFB制御系が所定の安定性(ゲイン余裕、位相余裕)を具備するパラメータ空間(以降、安定空間)を探索空間として算出し、その空間内で積極的なパラメータ探索を行うFB制御パラメータの自動調整法を提案している。そこでは、パラメータ探索空間の算出方法として、制約付き最適化問題の可解性を利用して所定の安定性を満足するパラメータ空間を算出する方法が提案されており、全探索的に安定空間を算出する方法よりも短時間で探索空間を算出可能としている。
【0004】
特許文献1には、パラメータ探索空間に含まれる複数のパラメータ探索点に対して、順序を付与し、前記順序を示す値を、パラメータを探索するために操作される探索対象として、その最適化アルゴリズム(遺伝的アルゴリズム)を実行するパラメータ探索方法が開示されている。
特許文献2には、最適化アルゴリズムにベイズ最適化(非特許文献2)を用いて、未探索のパラメータに対する制約関数の信頼限界を決定し、制約関数が所定の条件を満たすと推定されるパラメータ範囲内で目的関数を最適化するパラメータを次の探索点とするパラメータ探索方法が開示されている。
【先行技術文献】
【特許文献】
【0005】
特開2020-140345号公報
特開2019-113985号公報
【非特許文献】
【0006】
Y. Maeda, N. Gou, and M. Iwasaki,“ A Stable Parameter Area Calculation Method for Advanced Autotuning of Feedback Controller,”in Proceedings of the 17th IEEE International Conference on Industrial Informatics, pp.541-546, 2019.
B. Shahriari, K. Swersky, Z. Wang, R.P. Adams, and N.D. Freitas,“Taking the human out of the loop: A review of Bayesian optimization,”in Proceedings of the IEEE, vol.104, no.1, pp.148-175, 2016.
Y. Maeda and M. Iwasaki,“ Circle Condition-Based Feedback Controller Design for Fast and Precise Positioning, ”IEEE Transactions on Industrial Electronics, vol.61, no.2, pp.1113-1122, 2014.
持橋, 大羽: 「ガウス過程と機械学習」, 講談社(2019)
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかし、非特許文献1におけるパラメータ探索空間の算出方法には、
・算出できる探索空間は安定空間の部分空間であることから、実現可能な制御性能が制限される場合がある。
・広大な探索空間を算出するためには最適化問題の可解性判定を多数回行う必要があり、探索空間の算出時間が長大となる。
という問題が確認されている。
特許文献2は、制御性能に係る目的関数を最適化することに重きを置いているため、探索空間として広大な安定空間を高精度に推定できることは保証されない。
【0008】
本発明では、広大な安定空間を自動調整におけるパラメータ探索空間とし、かつそれを効率的に算出する方法として、ベイズ最適化に基づく探索空間推定法を提案する。提案法は、安定性が統計的分布に従うと仮定し、安定性の推定とその不確実性を考慮してベイズ最適化により安定空間を効率的に推定するものである。これにより、非特許文献1よりも短時間で広大な探索空間の算出を可能とする。
【課題を解決するための手段】
【0009】
上記課題を解決する本発明は以下の通りである。
(1)フィードバック制御パラメータの自動調整におけるパラメータ探索空間算出方法であって、初期フィードバックパラメータρ
ini
と、ρ
ini
に対して計算して求めた安定性H(ρ
ini
)を、初期データD
H
=(ρ
ini
;H(ρ
ini
))とし、推定の反復子iをi:=1として初期化するステップ1と、安定性が統計的分布に従うという仮定のもと安定性の推定H^(ρ)とその不確実性σ
2
(ρ)を計算するステップ2と、獲得関数を計算し、獲得関数が最小となるフィードバックパラメータρ
next
を次の探索点とするステップ3と、ρ
next
と安定性H(ρ
next
)をD
H
に追加するステップ4と、を備え、iが反復上限回数n未満ならばi:=i+1としてStep2へ戻り、i=nになったら終了して、H^(ρ)≧0となる空間を、探索空間Tとすることを特徴とするパラメータ探索空間算出方法である。
ここで、「H^」は、例えば(8)式に記載のようにHの上に記載されるべき^を、便宜上Hに続いて^を記載したものである。
(2)ステップ2において、前記安定性の推定H^(ρ)が従うと仮定する統計的分布はガウス分布であることを特徴とする(1)に記載のパラメータ探索空間算出方法である。
(3)H(ρ
1
)、H(ρ
2
)、…H(ρ
N
)が既知であるとき、H(ρ
1
)、H(ρ
2
)、…H(ρ
N
)がガウス過程に従うことを特徴とする(1)に記載の制御パラメータ探索空間算出方法である。
(4)ステップ3において、獲得関数は所定の安定性を満たすパラメータ空間の境界を推定する関数であることを特徴とする(1)から(3)の何れか1つに記載のパラメータ探索空間算出方法である。
(5)ステップ3において、前記獲得関数の最小化はベイズ最適化によって行うことを特徴とする(1)から(3)の何れか1つに記載のパラメータ探索空間算出方法である。
【発明の効果】
【0010】
本発明によれば、従来技術よりも短い時間で、広大なパラメータ探索空間を算出でき、現在主流技術よりも効果的な自動調整を行うことができる。自動調整の効率化は、生産性の向上、製品付加価値の向上につながる。
【図面の簡単な説明】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
1か月前
アズビル株式会社
流量制御装置
20日前
アズビル株式会社
電圧出力回路
1か月前
ミネベアミツミ株式会社
入力装置
11日前
トヨタ自動車株式会社
自動走行搬送車
19日前
エイブリック株式会社
ボルテージレギュレータ
19日前
株式会社クボタ
故障診断装置
18日前
株式会社クボタ
操作機構及び作業車
1か月前
日本プラスト株式会社
節度感付加装置
1か月前
リックス株式会社
状態検出装置
14日前
株式会社デンソー
制御装置
24日前
株式会社デンソー
制御装置
24日前
株式会社デンソー
減圧弁制御装置
1か月前
株式会社GSユアサ
電力変換装置
27日前
株式会社オリジン
電源装置
1か月前
株式会社オリジン
電源装置
1か月前
村田機械株式会社
搬送車システム
4日前
株式会社デンソー
電子制御装置
1か月前
川崎重工業株式会社
要因分析装置及び要因分析方法
24日前
THK株式会社
編集装置及び編集方法
1か月前
THK株式会社
編集装置及び編集方法
1か月前
株式会社FUJI
暖機運転システムを備えた工作機械
1か月前
株式会社ディスコ
加工装置
1か月前
東洋電装株式会社
移動検出装置および鞍乗車両
26日前
村田機械株式会社
走行車システム
1か月前
国立大学法人 名古屋工業大学
パラメータ探索空間算出方法
1か月前
愛三工業株式会社
弁システム
1か月前
株式会社デンソー
ペダル装置
1か月前
株式会社デンソー
ペダル装置
24日前
DMG森精機株式会社
工作機械
1か月前
株式会社ダイフク
無人航空機の搬送システム
26日前
八重洲無線株式会社
回動つまみの回動軸への取り付け機構
1か月前
多摩川精機株式会社
突入電流防止回路
4日前
学校法人早稲田大学
ロボット、軌道計画装置及びプログラム
1か月前
株式会社SUBARU
電気自動車
1か月前
パナソニックIPマネジメント株式会社
位置調整装置
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ