TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024033354
公報種別
公開特許公報(A)
公開日
2024-03-13
出願番号
2022136883
出願日
2022-08-30
発明の名称
位置調整装置
出願人
パナソニックIPマネジメント株式会社
代理人
個人
,
個人
主分類
G05D
3/12 20060101AFI20240306BHJP(制御;調整)
要約
【課題】撮像画像を用いたフィードバック制御を精度良く行うことが可能な位置調整装置を提供する。
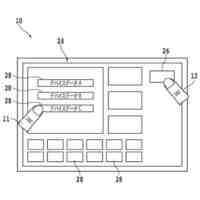
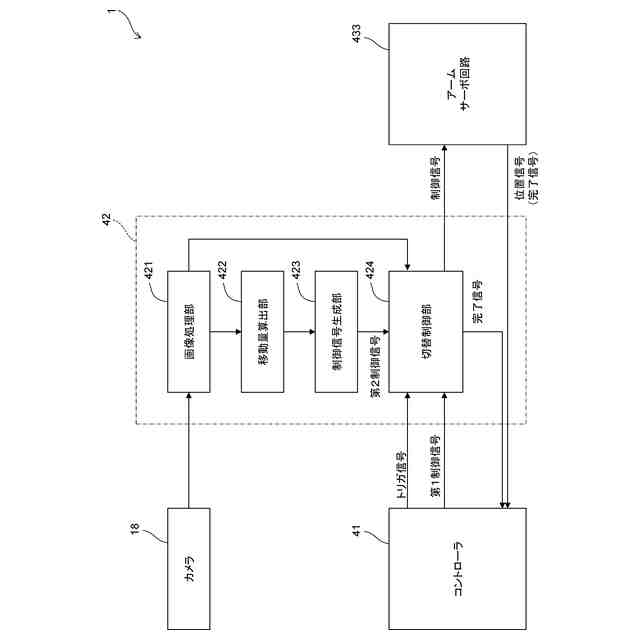
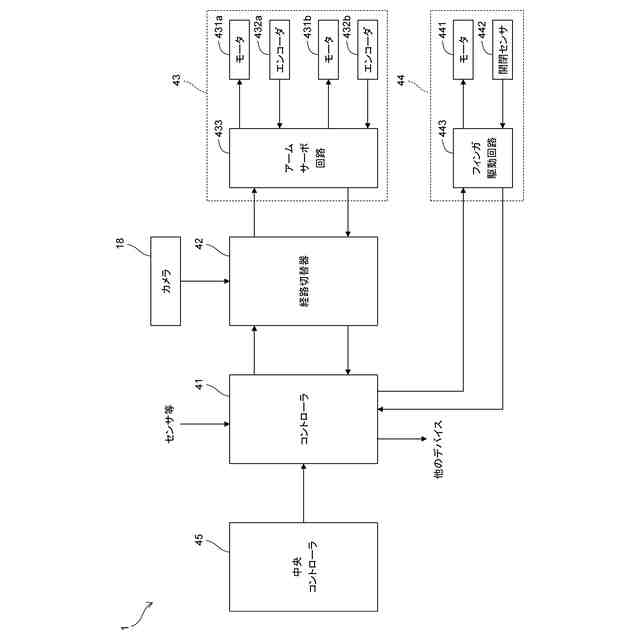
【解決手段】位置調整装置1は、対象物を移動させるアームサーボ回路433(駆動部)と、対象物を目標位置に移動させるための第1制御信号を生成するコントローラ41と、対象物の現在位置と目標位置とを含む撮像画像に基づき、対象物を目標位置に移動させるための第2制御信号を生成する制御信号生成部423と、第1制御信号および第2制御信号の何れか一方を選択的にアームサーボ回路433(駆動部)に供給する切替制御部424と、を備える。
【選択図】図4
特許請求の範囲
【請求項1】
対象物を移動させる駆動部と、
前記対象物を目標位置に移動させるための第1制御信号を生成するコントローラと、
前記対象物の現在位置と前記目標位置とを含む撮像画像に基づき、前記対象物を前記目標位置に移動させるための第2制御信号を生成する制御信号生成部と、
前記第1制御信号および前記第2制御信号の何れか一方を選択的に前記駆動部に供給する切替制御部と、を備える、
ことを特徴とする位置調整装置。
続きを表示(約 1,300 文字)
【請求項2】
請求項1に記載の位置調整装置において、
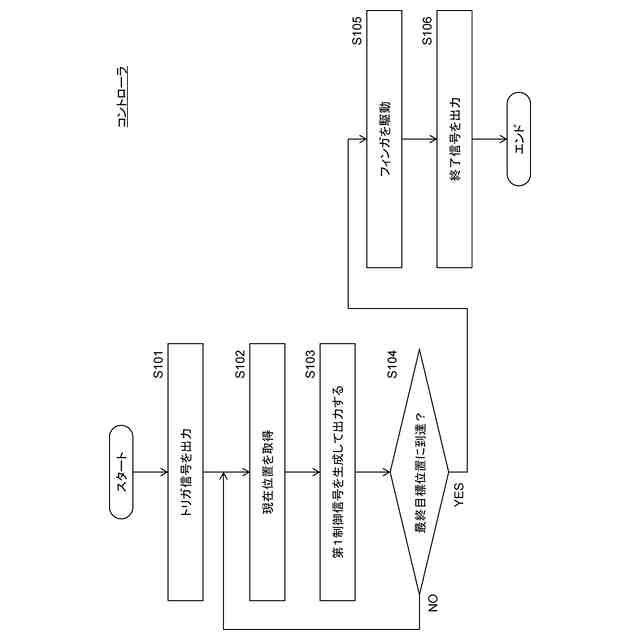
前記コントローラは、前記切替制御部に対し、前記第2制御信号を優先するためのトリガ信号を出力し、
前記切替制御部は、前記トリガ信号の受信に基づき、前記第1制御信号および前記第2制御信号のうち前記第2制御信号を優先的に前記駆動部に供給する、
ことを特徴とする位置調整装置。
【請求項3】
請求項1に記載の位置調整装置において、
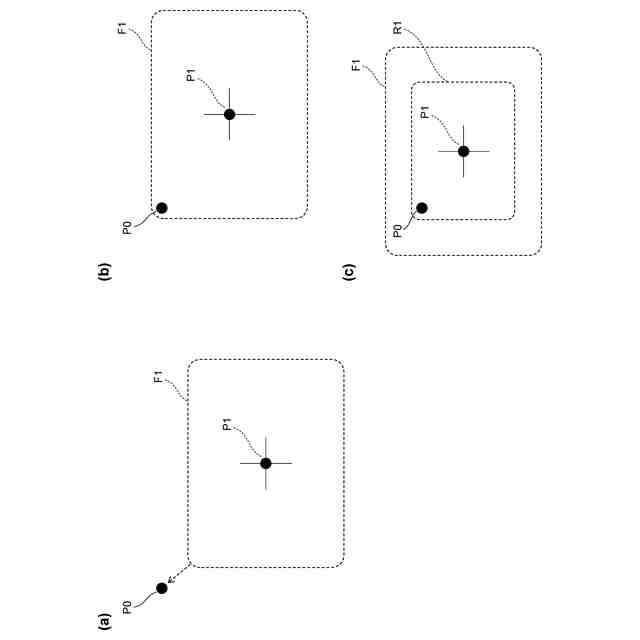
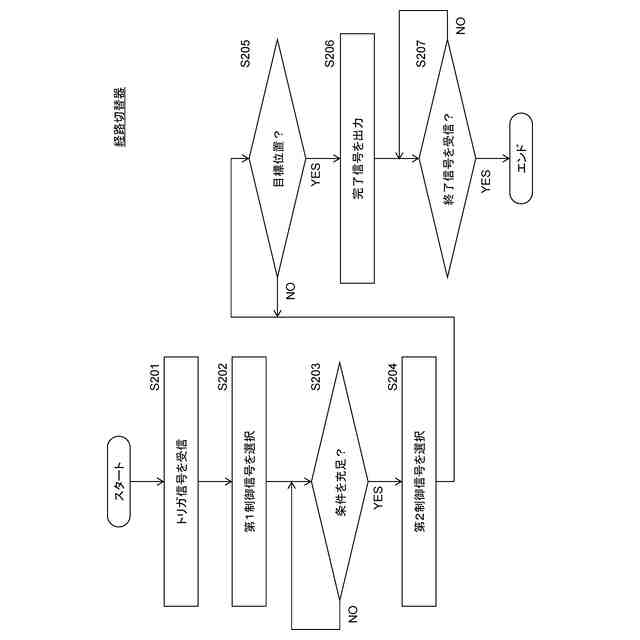
前記切替制御部は、前記撮像画像において、前記対象物の現在位置と前記目標位置とが、前記第2制御信号を生成可能な所定の条件を充足したことに基づいて、前記駆動部に供給する制御信号を前記第1制御信号から前記第2制御信号に切り替える、
ことを特徴とする位置調整装置。
【請求項4】
請求項3に記載の位置調整装置において、
前記条件は、前記対象物の現在位置と前記目標位置との両方が前記撮像画像に含まれること、または、前記現在位置と前記目標位置との両方が前記撮像画像上の所定の範囲内に含まれることを含む、
ことを特徴とする位置調整装置。
【請求項5】
請求項1に記載の位置調整装置において、
前記制御信号生成部および前記切替制御部を含む経路切替器を備え、
前記駆動部は、前記切替制御部により選択された制御信号に基づく動作の完了に応じて、前記動作の完了時における前記対象物の位置を含む完了信号を前記経路切替器に出力し、
前記経路切替器は、前記コントローラに対する前記完了信号の伝送を中継する、
ことを特徴とする位置調整装置。
【請求項6】
請求項5に記載の位置調整装置において、
前記経路切替器は、前記第2制御信号による制御時に取得された前記撮像画像から前記現在位置と前記目標位置とが実質的に一致したと判定したことに応じて、位置調整の完了を示す完了信号を、前記コントローラに出力する、
ことを特徴とする位置調整装置。
【請求項7】
請求項1ないし6の何れか一項に記載の位置調整装置において、
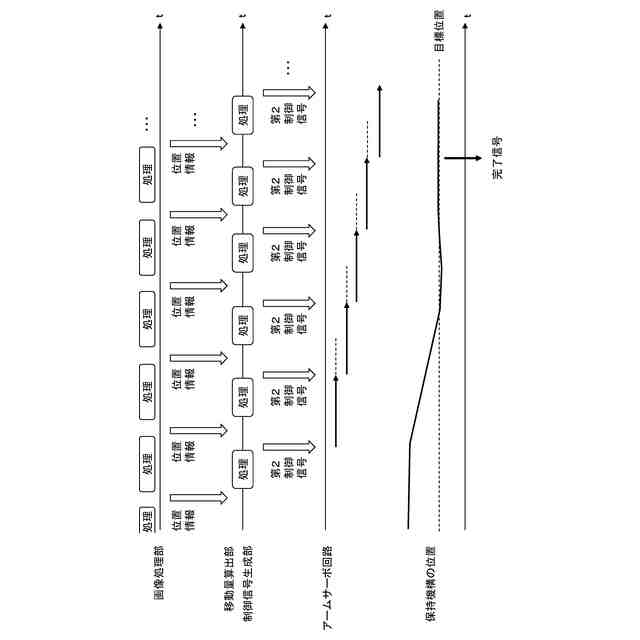
前記撮像画像を解析処理して前記現在位置と前記目標位置との位置関係を示す位置情報を出力する画像処理部を備え、
前記画像処理部は、前記撮像画像の解析処理の完了に応じて、次の前記撮像画像に対する解析処理を実行し、
前記制御信号生成部は、前記画像処理部から前記位置情報が出力されるごとに前記第2制御信号を生成して前記切替制御部に出力し、
前記駆動部は、前記切替制御部から前記第2制御信号を取得するごとに、前記対象物の駆動動作を新たな前記第2制御信号による駆動動作に更新する、
ことを特徴とする位置調整装置。
【請求項8】
請求項1に記載の位置調整装置において、
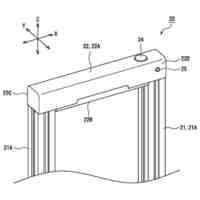
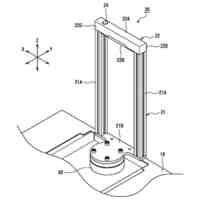
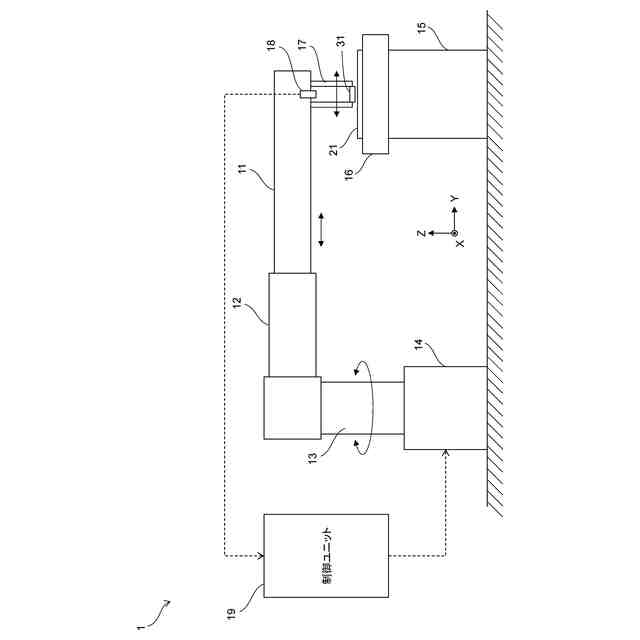
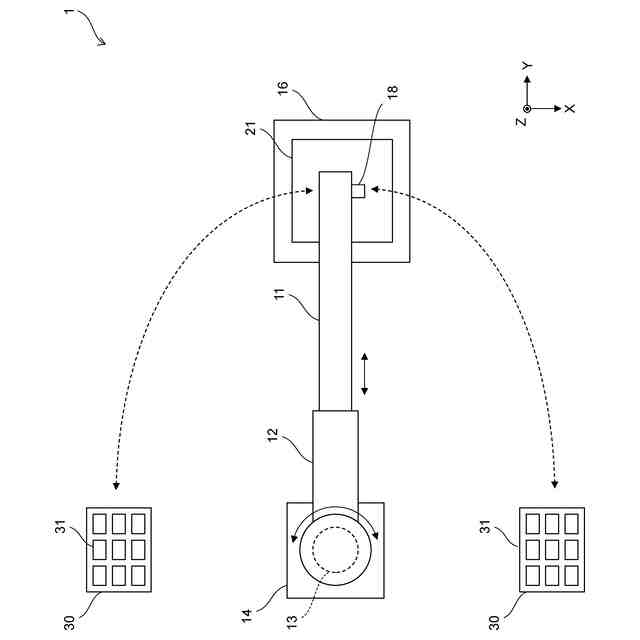
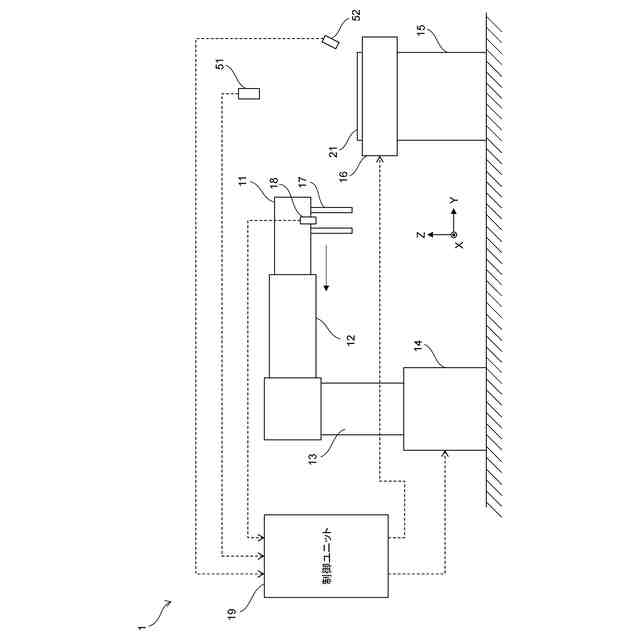
前記対象物は、物品の保持および非保持が可能な保持機構であり、
前記駆動部は、端部に前記保持機構を有するアームを駆動し、
前記第1制御信号または前記第2制御信号により前記駆動部を駆動して前記物品を被設置物上の前記目標位置に移送する、
ことを特徴とする位置調整装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、対象物の位置を調整する位置調整装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
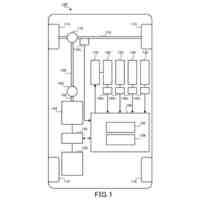
従来、対象物の位置を調整する位置調整装置が、種々の機器に用いられている。たとえば、XYZθステージ上の載置面に載置された物品の位置を、XYZθステージに対する制御により調整する位置調整装置が知られている。あるいは、被設置物上の目標位置に物品を移送する移送装置に位置調整装置が用いられる。この他、検査、測定または文字認識の場面では、撮像視野が検査、測定または文字認識の対象範囲に適合するよう、カメラと対象物との相対位置が調整される。
【0003】
以下の特許文献1には、制御対象装置からの入力信号に応じて制御対象装置の動作制御に必要な出力信号を生成して出力する第1制御コントローラ部と、第一制御コントローラ部の機能を代替する第2制御コントローラ部とを備えた制御装置が記載されている。この制御装置では、第1制御コントローラ部と第2制御コントローラ部とを並行処理させたときに、同一の入力信号に応じてそれぞれから出力される出力信号の整合性が検証され、その検証結果により、これら出力信号の何れかが制御対象装置に与えられる。
【先行技術文献】
【特許文献】
【0004】
特開2019-168816号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述の位置調整装置では、対象物と目標位置とを含む撮像画像に基づき、対象物を目標位置に移動させるフィードバック制御が行われ得る。この制御では、撮像画像に対する解析処理によって目標位置と対象物の現在位置とが取得され、取得された現在位置を目標位置に移動させるための移動量(方向、距離)が算出される。そして、この移動量から、対象物と目標位置とを相対的に移動させる駆動部の制御信号が生成され、生成された制御信号が駆動部に供給される。
【0006】
上記フィードバック制御では、たとえば、このような処理が、一定周期で撮像画像を取得するごとに繰り返し実行される。この場合、1周期前の制御信号により駆動部が駆動されている途中で、新たに制御信号が生成され、生成された新たな制御信号により駆動部が駆動される。これにより、円滑かつ迅速に、対象物の現在位置を目標位置に収束させることができる。
【0007】
このようなフィードバック制御は、通常、位置調整装置の各部を制御するコントローラによって行われる。その一方で、上記フィードバック制御では、撮像画像が取得されたタイミングと、この撮像画像に基づく制御信号が駆動部に適用されるタイミングとの間の時間差が大きいと、適正な制御が行われなくなってしまう。すなわち、この時間差の間も前回の制御信号により駆動部が駆動されているため、上記時間差が大きいと、制御信号が駆動部に適用されるタイミングにおける現在位置と目標位置との位置関係は、撮像画像が取得されたタイミングにおけるこれらの位置関係から大きくずれてしまう。その結果、上述のフィードバック制御を適正に行えなくなる。
【0008】
これに対し、コントローラは、装置全体の制御を担うため、装置全体の種々の制御処理を並行して行う必要がある。このため、上記フィードバック制御をコントローラが行うと、画像処理から制御信号の生成までの処理時間が長くなってしまい、上記時間差が大きくなってしまう。その結果、上記のとおり、撮像画像に基づくフィードバック制御を適正に行えなくなってしまう。
【0009】
かかる課題に鑑み、本発明は、撮像画像を用いたフィードバック制御を精度良く行うことが可能な位置調整装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明の主たる態様に係る位置調整装置は、対象物を移動させる駆動部と、前記対象物を目標位置に移動させるための第1制御信号を生成するコントローラと、前記対象物の現在位置と前記目標位置とを含む撮像画像に基づき、前記対象物を前記目標位置に移動させるための第2制御信号を生成する制御信号生成部と、前記第1制御信号および前記第2制御信号の何れか一方を選択的に前記駆動部に供給する切替制御部と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
アズビル株式会社
流量制御装置
20日前
ミネベアミツミ株式会社
入力装置
11日前
トヨタ自動車株式会社
自動走行搬送車
19日前
エイブリック株式会社
ボルテージレギュレータ
19日前
株式会社クボタ
故障診断装置
18日前
株式会社デンソー
制御装置
24日前
日本プラスト株式会社
節度感付加装置
1か月前
株式会社デンソー
制御装置
24日前
リックス株式会社
状態検出装置
14日前
村田機械株式会社
搬送車システム
4日前
株式会社GSユアサ
電力変換装置
27日前
株式会社オリジン
電源装置
1か月前
株式会社オリジン
電源装置
1か月前
THK株式会社
編集装置及び編集方法
1か月前
川崎重工業株式会社
要因分析装置及び要因分析方法
24日前
THK株式会社
編集装置及び編集方法
1か月前
株式会社ディスコ
加工装置
1か月前
東洋電装株式会社
移動検出装置および鞍乗車両
26日前
国立大学法人 名古屋工業大学
パラメータ探索空間算出方法
1か月前
村田機械株式会社
走行車システム
1か月前
株式会社FUJI
暖機運転システムを備えた工作機械
1か月前
株式会社デンソー
ペダル装置
24日前
愛三工業株式会社
弁システム
1か月前
株式会社デンソー
ペダル装置
1か月前
株式会社ダイフク
無人航空機の搬送システム
26日前
八重洲無線株式会社
回動つまみの回動軸への取り付け機構
1か月前
多摩川精機株式会社
突入電流防止回路
4日前
株式会社ディスコ
加工装置
1か月前
株式会社ディスコ
加工装置
4日前
株式会社SUBARU
電気自動車
1か月前
THK株式会社
変数の突合方法及びプログラム
1か月前
株式会社東芝
データ処理装置及びガス変換システム
1か月前
株式会社日立製作所
設備診断装置及び設備診断方法
11日前
セイコーエプソン株式会社
生産ライン設計支援装置
1か月前
清水建設株式会社
自律移動ロボット
11日前
清水建設株式会社
自律移動ロボット
11日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ