TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024047282
公報種別
公開特許公報(A)
公開日
2024-04-05
出願番号
2022152819
出願日
2022-09-26
発明の名称
ペダル装置
出願人
株式会社デンソー
代理人
弁理士法人ゆうあい特許事務所
主分類
G05G
1/30 20080401AFI20240329BHJP(制御;調整)
要約
【課題】異物が起因して弾性部材55、ホルダ52に作動不良が生じることを抑える。
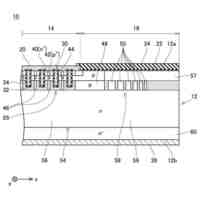
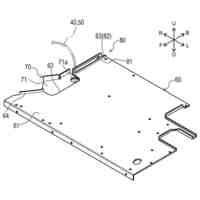
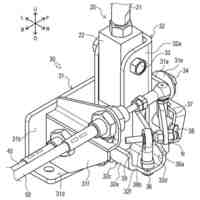
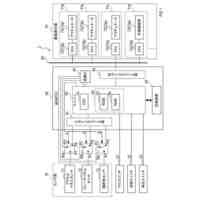
【解決手段】ペダル装置1は、軸線方向Dcに変位可能に構成され、弾性部材55を軸線方向Dcの他方側から支えるホルダ52を備える。ペダル装置1は、ホルダ52を軸線方向Dcの他方側から支え、弾性部材55の弾性力をホルダ52を介して軸線方向Dcの一方側から受けることにより弾性変形により圧縮して弾性力をホルダ52に与える弾性部材54を備える。ホルダ52は、ホルダ52の上下方向に異物を通過させる通路90を有している。したがって、通路90によってホルダ52の中空部52aからホルダ52の外側に異物を排出する。
【選択図】図2
特許請求の範囲
【請求項1】
ペダル装置であって、
ペダル(20、20A)と、
前記ペダルの変位に伴って前記ペダルから与えられる力を所定方向(Dc)の一方側から受けることにより所定方向(Dc)に変位可能に構成されるホルダ(51、52、133、154、132A、210、200、281)と、
前記ホルダを前記所定方向の他方側から支え、前記ペダルから与えられる力を前記ホルダを介して前記所定方向の一方側から受けることにより弾性変形して弾性力を前記ホルダに与える少なくとも1つの弾性部材(54、55、143、141、230)と、を備え、
前記ホルダは、異物を通過させる少なくとも1つの通路(90、93、93A、94、154、161、162、211a、200d、281d)を有しているペダル装置。
続きを表示(約 1,700 文字)
【請求項2】
前記少なくとも1つの弾性部材(54、55)は、前記ホルダを前記所定方向の他方側から支え、かつ支持部材(51、10)によって前記所定方向の他方側から支えられた状態で、並列に配置されている複数の弾性部材であり、
前記複数の弾性部材は、それぞれ、前記ペダルから与えられる力を前記ホルダを介して前記所定方向の一方側から受けることにより弾性変形して弾性力を前記ホルダに与える請求項1に記載のペダル装置。
【請求項3】
前記少なくとも1つの弾性部材を少なくとも1つの第1弾性部材(54)としたとき、前記ホルダによって前記所定方向の他方側から支えられ、前記ペダルの変位に伴って前記ペダルから与えられる力を所定方向(Dc)の一方側から受けることにより弾性変形して弾性力を前記ペダルに与える少なくとも1つの第2弾性部材(55、141、140、231)を備え、
前記少なくとも1つの前記第1弾性部材は、前記ペダルから与えられる力を前記ホルダ、および前記少なくとも1つの前記第2弾性部材を介して前記所定方向の一方側から受けることにより弾性変形して弾性力を前記ホルダに与える請求項1に記載のペダル装置。
【請求項4】
前記ホルダのうち最上部と最下部とから等距離になる仮想面を基準面(Zh)としたとき、前記少なくとも1つの通路(93、94)は、前記ホルダのうち前記基準面に対して下側に配置されている請求項1に記載のペダル装置。
【請求項5】
前記ホルダのうち最上部と最下部とから等距離になる仮想面を基準面(Zh)としたとき、前記少なくとも1つの通路(93A)は、前記ホルダのうち前記基準面を含む位置に配置されている請求項1に記載のペダル装置。
【請求項6】
前記基準面は、前記ペダル、前記ホルダ、および前記少なくとも1つの弾性部材が車両(80)に搭載された状態で、前記ホルダのうち最上部と最下部とから等距離になる仮想面である請求項4または5に記載のペダル装置。
【請求項7】
前記ホルダは、前記所定方向に延びる軸線(Zb)を中心とする筒状に形成されている筒部(52b)と、前記筒部を前記所定方向から塞ぐ部材(52f)と、を有しており、
前記少なくとも1つの通路(93)は、前記部材に配置されている請求項1に記載のペダル装置。
【請求項8】
前記ホルダは、前記所定方向に延びる軸線(Zb)を中心とする筒状に形成されている筒部(52b)を有し、
前記少なくとも1つの通路(94)は、前記筒部に配置されている請求項1に記載のペダル装置。
【請求項9】
前記ホルダは、前記所定方向に延びる軸線(Zb)を中心とする筒状に形成されている筒部(52b)を有し、
前記少なくとも1つの通路(91A)は、前記筒部のうち軸線(Zb)を中心とする内周面(400)によって形成されており、
さらに、前記少なくとも1つの通路(91A)は、前記筒部のうち前記所定方向に開口されて前記異物を排出する出口(401)を有しており、
前記少なくとも1つの通路は、前記所定方向において前記出口に近づくほど、軸線(Zb)を中心とする径方向外側に向かうように形成されている請求項1に記載のペダル装置。
【請求項10】
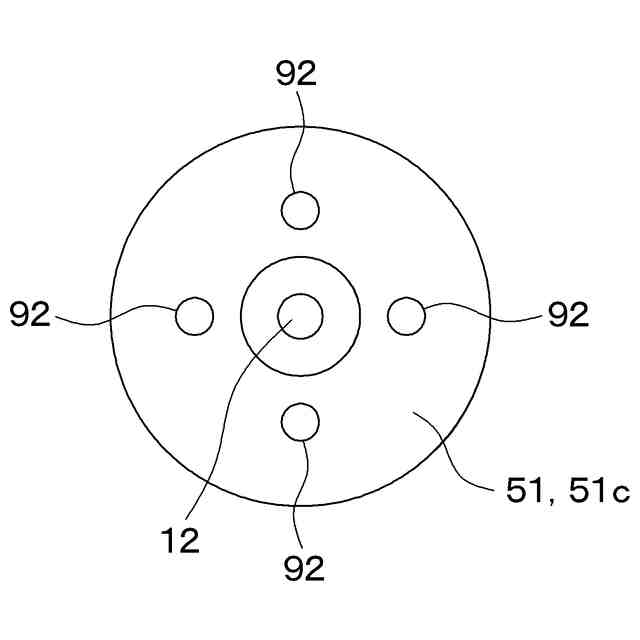
前記ホルダ(52)を第1ホルダとした場合に、前記所定方向に変位可能に構成され、かつ前記第2弾性部材を前記所定方向の他方側から支える第2ホルダ(51)と、
前記第2ホルダを前記所定方向の他方側から支え、前記第2弾性部材の前記弾性力を前記第2ホルダを介して受けることにより弾性変形する第3弾性部材(53)と、を備え、
前記少なくとも1つの通路を少なくとも1つの第1通路(90)としたとき、前記第2ホルダは、異物を通過させる少なくとも1つの第2通路(92)を有している請求項3に記載のペダル装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ペダル装置に関するものである。
続きを表示(約 860 文字)
【背景技術】
【0002】
従来、ペダル装置では、運転者から踏み込み操作されることによって回転するペダルと、ペダルの回転に伴ってペダルから加わる回転力に対する反力を発生する反力発生部を備えるものが提案されている(例えば、特許文献1参照)。
【0003】
反力発生部では、ホルダ、第1弾性部材、および第2弾性部材がハウジング内に収納されている。ホルダは、上下方向に移動可能に構成されている。第1弾性部材は、ホルダによって支持され、かつペダルから加わる回転力により押されることにより弾性変形により圧縮して弾性力をペダルに与える。
【0004】
第2弾性部材は、ハウジングの底部に支持されて、ホルダが車両下側に移動することに伴ってホルダから押されて弾性変形により圧縮して弾性力をホルダに与える。
【0005】
このように反力発生部は、第1、第2の弾性部材のそれぞれの弾性変形によりペダルから加わる回転力に対する反力として、第1、第2の弾性部材の弾性力をペダルに加えることになる。
【先行技術文献】
【特許文献】
【0006】
欧州特許出願公開第3589518号明細書
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記特許文献1のペダル装置の反力発生部は、ペダルから加わる回転力に対する反力として、第1、第2の弾性部材の弾性力をペダルに加える。
【0008】
しかし、水等の異物がホルダに貯まると、錆、氷結や生じてホルダに作動不良が生じる恐れがある。
【0009】
また、水等の異物がハウジング内に貯まると、弾性部材に錆、氷結が生じて、弾性部材の作動不良になる虞がある。
【0010】
さらに、ホルダや弾性部材の摩耗粉、砂、埃等の異物が、ホルダや弾性部材に作動不良を生じさせる虞がある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
半導体装置とその製造方法
今日
トヨタ自動車株式会社
車両走行制御装置
今日
トヨタ自動車株式会社
車両の運転支援装置
今日
株式会社デンソー
内燃機関用の点火コイル及びこれを備えた内燃機関
今日
トヨタ自動車株式会社
衝突回避支援装置、衝突回避支援方法及び衝突回避支援プログラム
今日
株式会社ジェイテクト
車両用電源システム及び車両用電源システムの制御方法
今日
株式会社クボタ
作業車
1か月前
アズビル株式会社
電圧出力回路
1か月前
アズビル株式会社
流量制御装置
23日前
ミネベアミツミ株式会社
入力装置
14日前
株式会社エクセディ
作業ロボット
2日前
トヨタ自動車株式会社
自動走行搬送車
22日前
三菱電機株式会社
移動体制御装置
1日前
エイブリック株式会社
ボルテージレギュレータ
22日前
株式会社クボタ
操作機構及び作業車
1か月前
株式会社クボタ
故障診断装置
21日前
株式会社デンソー
制御装置
27日前
日本プラスト株式会社
節度感付加装置
1か月前
岩田工機株式会社
加工装置
1日前
株式会社デンソー
制御装置
27日前
リックス株式会社
状態検出装置
17日前
株式会社デンソー
減圧弁制御装置
1か月前
村田機械株式会社
搬送車システム
7日前
株式会社オリジン
電源装置
1か月前
株式会社GSユアサ
電力変換装置
1か月前
株式会社オリジン
電源装置
1か月前
株式会社デンソー
電子制御装置
1か月前
THK株式会社
編集装置及び編集方法
1か月前
川崎重工業株式会社
要因分析装置及び要因分析方法
27日前
THK株式会社
編集装置及び編集方法
1か月前
株式会社FUJI
暖機運転システムを備えた工作機械
1か月前
東洋電装株式会社
移動検出装置および鞍乗車両
29日前
国立大学法人 名古屋工業大学
パラメータ探索空間算出方法
1か月前
株式会社ディスコ
加工装置
1か月前
村田機械株式会社
走行車システム
1か月前
DMG森精機株式会社
工作機械
1か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ