TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024058879
公報種別
公開特許公報(A)
公開日
2024-04-30
出願番号
2022166271
出願日
2022-10-17
発明の名称
作業ロボット
出願人
株式会社エクセディ
代理人
個人
主分類
G05D
1/43 20240101AFI20240422BHJP(制御;調整)
要約
【課題】汎用性の高い作業ロボットを提供する。
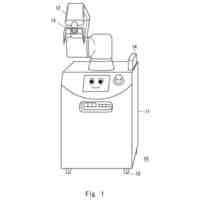
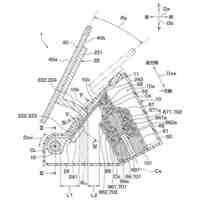
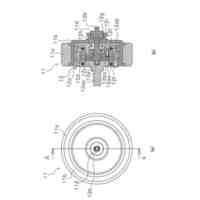
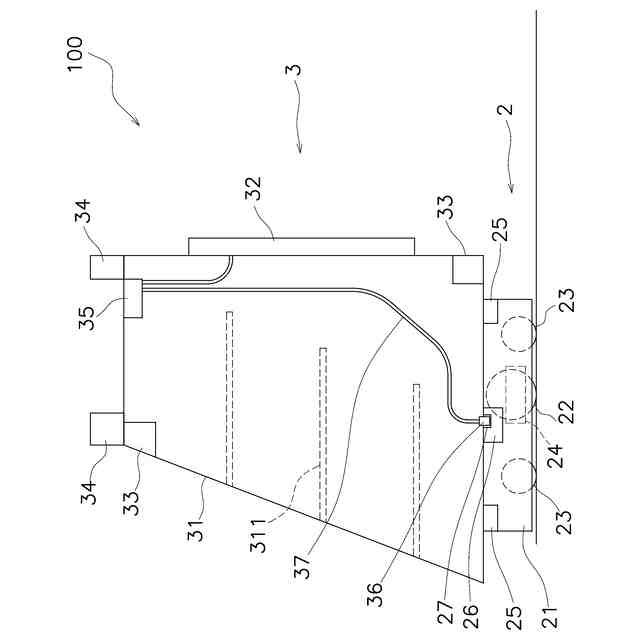
【解決手段】作業ロボット100は、走行ユニット2と、第1作業ユニット3とを備える。走行ユニット2は、自律走行可能に構成される。走行ユニット2は、第1制御部26及び第1コネクタ27を有する。第1制御部26は、自律走行に関する第1処理を実行する。第1コネクタ27は、第1制御部26と電気的に接続する。第1作業ユニット3は、走行ユニット2上に取り外し可能に搭載される。第1作業ユニット3は、第2制御部35及び第2コネクタ36を有する。第2制御部35は、作業に関する第2処理を実行する。第2コネクタ36は、第2制御部35と電気的に接続されるとともに第1コネクタ27に取り外し可能に接続される。
【選択図】図1
特許請求の範囲
【請求項1】
自律走行に関する第1処理を実行するように構成される第1制御部、及び前記第1制御部と電気的に接続する第1コネクタ、を有し、自律走行可能に構成される走行ユニットと、
作業に関する第2処理を実行するように構成される第2制御部、及び前記第2制御部と電気的に接続されるとともに前記第1コネクタに取り外し可能に接続される第2コネクタ、を有し、前記走行ユニット上に取り外し可能に搭載される第1作業ユニットと、
を備える、作業ロボット。
続きを表示(約 650 文字)
【請求項2】
前記第1作業ユニットは、前記第2コネクタと前記第2制御部とを連結するLANケーブルを有する、
請求項1に記載の作業ロボット。
【請求項3】
前記第1制御部は、前記第2制御部から取得したデータに基づき、前記第1処理を実行するように構成される、
請求項1に記載の作業ロボット。
【請求項4】
前記走行ユニットは、対象物との距離を検出するように構成される第1センサを有し、
前記第1作業ユニットは、前記対象物との距離を検出するように構成される第2センサを有し、
前記第1制御部は、前記第1センサ及び前記第2センサから取得したデータに基づき、前記第1処理を実行するように構成される、
請求項1に記載の作業ロボット。
【請求項5】
前記第2処理における作業とは異なる作業に関する第3処理を実行するように構成される第3制御部、及び前記第3制御部と電気的に接続されるとともに前記第1コネクタに取り外し可能に取り付けられる第3コネクタ、を有し、前記第1作業ユニットに代わって前記走行ユニット上に取り外し可能に搭載される第2作業ユニットをさらに備える、
請求項1に記載の作業ロボット。
【請求項6】
前記走行ユニット又は前記第1作業ユニットは、作業中に取得したデータをインターネットを介してサーバに送信するように構成される通信部を有する、
請求項1に記載の作業ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業ロボットに関するものである。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
近年、飲食店内で配膳を行う配膳ロボットなどのような作業ロボットが使われ始めている。例えば、特許文献1には、人や物などの障害物を検知して回避しながら飲食店内を自律走行可能な配膳ロボットが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-104301号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した配線ロボットは、基本的には配膳のみにしか使用が出来ず、汎用性が低いという問題がある。そこで、本発明の課題は、汎用性の高い作業ロボットを提供することにある。
【課題を解決するための手段】
【0005】
第1態様に係る作業ロボットは、走行ユニットと、第1作業ユニットとを備える。走行ユニットは、自律走行可能に構成される。走行ユニットは、第1制御部及び第1コネクタを有する。第1制御部は、自律走行に関する第1処理を実行するように構成される。第1コネクタは、第1制御部と電気的に接続する。第1作業ユニットは、走行ユニット上に取り外し可能に搭載される。第1作業ユニットは、第2制御部及び第2コネクタを有する。第2制御部は、作業に関する第2処理を実行するように構成される。第2コネクタは、第2制御部と電気的に接続されるとともに第1コネクタに取り外し可能に接続される。
【0006】
この構成によれば、第1作業ユニットは、走行ユニットに対して取り外し可能に搭載されているため、第1作業ユニットを走行ユニットから取り外して第1作業ユニットの代わりに他の作業ユニットに取り換えることができる。このため、作業ロボットは、高い汎用性を有する。
【0007】
第2態様に係る作業ロボットは、第1態様に係る作業ロボットにおいて、次のように構成される。第1作業ユニットは、第2コネクタと第2制御部とを連結するLANケーブルを有する。
【0008】
第3態様に係る作業ロボットは、第1又は第2態様に係る作業ロボットにおいて、次のように構成される。第1制御部は、第2制御部から取得した情報に基づき、第1処理を実行するように構成される。
【0009】
第4態様に係る作業ロボットは、第1から第3態様のいずれかに係る作業ロボットにおいて、次のように構成される。走行ユニットは、対象物との距離を検出するように構成される第1センサを有する。第1作業ユニットは、対象物との距離を検出するように構成される第2センサを有する。第1制御部は、第1センサ及び第2センサから取得したデータに基づき、第1処理を実行するように構成される。
【0010】
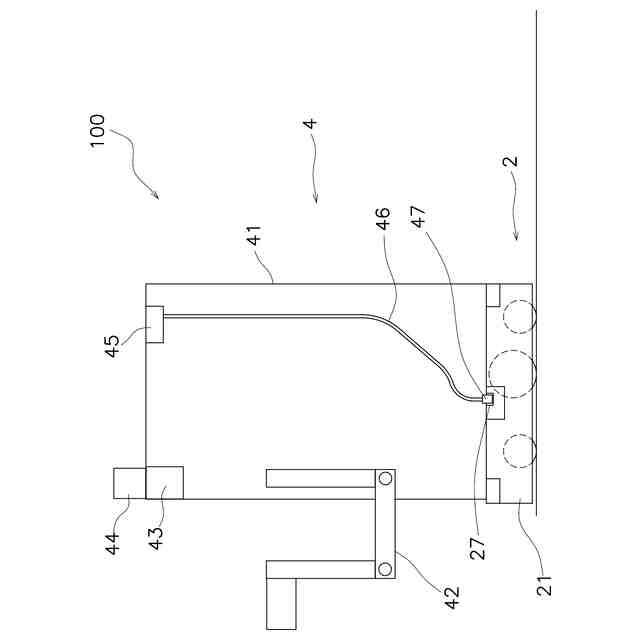
第5態様に係る作業ロボットは、第1から第4態様のいずれかに係る作業ロボットにおいて、第2作業ユニットをさらに備える。第2作業ユニットは、第1作業ユニットに代わって走行ユニット上に取り外し可能に搭載される。第2作業ユニットは、第3制御部及び第3コネクタを有する。第3制御部は、第2処理における作業とは異なる作業に関する第3処理を実行するように構成される。第3コネクタは、第3制御部と電気的に接続されるとともに第1コネクタに取り外し可能に取り付けられる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電流源
12日前
株式会社クボタ
作業車
1か月前
株式会社エクセディ
作業ロボット
1か月前
ミネベアミツミ株式会社
入力装置
2か月前
アズビル株式会社
流量制御システム
1か月前
トヨタ自動車株式会社
自動作業装置
1か月前
トヨタ自動車株式会社
自動走行搬送車
2か月前
オムロン株式会社
開発装置、開発方法
1か月前
三菱電機株式会社
移動体制御装置
1か月前
株式会社ダイフク
搬送設備
1か月前
株式会社クボタ
故障診断装置
2か月前
株式会社ダイフク
物品搬送設備
1か月前
岩田工機株式会社
加工装置
1か月前
リックス株式会社
状態検出装置
2か月前
マキノジェイ株式会社
工作機械
11日前
株式会社デンソー
過電流検出回路
1か月前
村田機械株式会社
搬送車システム
1か月前
日置電機株式会社
信号出力装置および抵抗測定装置
1か月前
村田機械株式会社
無人搬送車システム
24日前
オムロン株式会社
サポート装置およびサポート方法
11日前
日本精工株式会社
制御システムおよび制御方法
1か月前
ローム株式会社
電圧生成回路
9日前
CKD日機電装株式会社
カスケード形PID制御系の設計法
26日前
横河電機株式会社
ロボット管理システム
19日前
日本精工株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
株式会社デンソー
ペダル装置
11日前
多摩川精機株式会社
突入電流防止回路
1か月前
シャープ株式会社
走行システム及び走行方法
1か月前
ローム株式会社
リニアレギュレータ
1か月前
株式会社ディスコ
加工装置
1か月前
富士電機株式会社
予測装置、予測方法及びプログラム
1か月前
株式会社日立製作所
設備診断装置及び設備診断方法
2か月前
アマノ株式会社
自律走行装置およびその妥当性評価方法
17日前
オムロン株式会社
回転体ユニットおよびこれを備えた操作装置
4日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ