TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024046089
公報種別
公開特許公報(A)
公開日
2024-04-03
出願番号
2022151261
出願日
2022-09-22
発明の名称
移動検出装置および鞍乗車両
出願人
東洋電装株式会社
代理人
個人
,
個人
主分類
G05G
5/05 20060101AFI20240327BHJP(制御;調整)
要約
【課題】移動の検出精度を高める。
【解決手段】ベース10がハウジング30に対して相対的に回動すると、第1駆動部11および第2駆動部12は、第1方向F1または第2方向F2に移動する。第1弾性部材S1は駆動部11、12間に配置され、第2弾性部材S2は、第1弾性部材S1と略同じ方向に伸縮するよう配置され、第1押さえ部材21は、第1弾性部材S1および第2弾性部材S2における第2方向F2の端部に配置される。押さえ部材22、23は、第1弾性部材S1における第1方向F1の端部に配置される。中立状態においては、第1押さえ部材21は第1駆動部11とハウジング30とに当接し、第2押さえ部材22は第2駆動部12に当接し且つハウジング30に当接せず、第3押さえ部材23はハウジング30に当接し且つ第2駆動部12に当接しない。
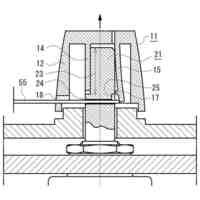
【選択図】図4
特許請求の範囲
【請求項1】
固定部材と、
一体に移動する第1駆動部および第2駆動部を含み、中立状態となる位置を含む移動範囲を、前記固定部材に対して相対的に、前記第1、第2駆動部が第1方向と前記第1方向に沿う方向とは反対の第2方向とに移動する移動部材と、
前記固定部材に対する前記移動部材の移動を検出する検出部と、
第1押さえ部材、第2押さえ部材および第3押さえ部材と、
前記移動部材の前記第1駆動部と前記第2駆動部との間に配置され、前記第1駆動部によって前記第1押さえ部材を介して前記第1方向に駆動され、前記第2駆動部によって前記第2押さえ部材を介して前記第2方向に駆動される第1弾性部材と、
前記第1弾性部材と略同じ方向に伸縮するように配置された第2弾性部材と、を有し、
前記第1押さえ部材は、前記第1弾性部材における前記第2方向の端部で且つ前記第2弾性部材における前記第2方向の端部に配置され、前記中立状態においては前記第1駆動部と前記固定部材とに当接し、
前記第2押さえ部材は、前記第1弾性部材における前記第1方向の端部に配置され、前記中立状態においては前記第2駆動部に当接し且つ前記固定部材に当接せず、
前記第3押さえ部材は、前記第2弾性部材における前記第1方向の端部に配置され、前記中立状態において前記固定部材に当接し且つ、前記第2駆動部に当接しない、移動検出装置。
続きを表示(約 980 文字)
【請求項2】
前記第1押さえ部材、前記第2押さえ部材、前記第3押さえ部材、前記第1弾性部材および前記第2弾性部材は、同軸上に配置される、請求項1に記載の移動検出装置。
【請求項3】
前記第2押さえ部材は、前記第1弾性部材の伸縮方向において前記第3押さえ部材の被係合部と係合する係合部を含み、前記中立状態においては、前記被係合部と前記係合部とは当接しない、請求項1に記載の移動検出装置。
【請求項4】
前記第1、第2駆動部の前記第2方向への移動中に、前記被係合部に前記係合部が当接することで、前記第2押さえ部材と一緒に前記第3押さえ部材が前記第2方向へ移動する、請求項3に記載の移動検出装置。
【請求項5】
前記被係合部に前記係合部が当接した状態からの前記第1、第2駆動部の前記第2方向への移動中は、前記固定部材によって前記第1押さえ部材の移動が規制されることで、前記第1弾性部材および前記第2弾性部材が圧縮される、請求項4に記載の移動検出装置。
【請求項6】
前記中立状態からの前記第1、第2駆動部の前記第1方向への移動中は、前記被係合部と前記係合部とは当接せず、前記第1押さえ部材は前記第1方向へ移動し、且つ、前記第3押さえ部材は前記第1方向へ移動しない、請求項3に記載の移動検出装置。
【請求項7】
前記第1、第2駆動部の前記第1方向への移動中は、前記固定部材によって第3押さえ部材の移動が規制されることで、前記第2弾性部材が圧縮される、請求項6に記載の移動検出装置。
【請求項8】
前記第1、第2駆動部の前記第1方向への移動中に、前記第2押さえ部材が前記固定部材に当接すると、前記第2押さえ部材の移動が規制され、且つ、さらに前記第1弾性部材が圧縮される、請求項7に記載の移動検出装置。
【請求項9】
前記移動部材は、回動中心を中心として回動し、
前記検出部は、前記固定部材に対する前記移動部材の回動角度を検出する、請求項1に記載の移動検出装置。
【請求項10】
前記中立状態において、前記第1弾性部材および前記第2弾性部材はいずれも圧縮状態である、請求項1に記載の移動検出装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本技術は、移動検出装置および鞍乗車両に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、固定部材と移動部材とを備え、移動部材の移動を検出することで、検出対象の操作等を検出する装置が知られている。例えば、特許文献1は、2つの部材間の相対的な回転角度を検出することで、二輪車のシフトペダルの操作を検出している。
【0003】
特許文献1では、磁石保持部材(固定部材)と、磁気検出手段を保持する検出手段保持部材(移動部材)との間に圧縮コイルバネ(弾性部材)が設けられる。自動二輪車のシフトペダルの操作によって検出手段保持部材が回転し、弾性部材を弾性変形させる。
【先行技術文献】
【特許文献】
【0004】
特開2021-51047号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1では、弾性部材の弾性力によって、移動部材がホームポジション(中立位置)に復帰する。しかし、弾性部材は、固定部材と移動部材との間に配置されるので、中立位置でがたつきが生じ、検出精度が低下するおそれがある。
【0006】
本技術は、移動の検出精度を高めることを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために本技術の移動検出装置は、固定部材と、一体に移動する第1駆動部および第2駆動部を含み、中立状態となる位置を含む移動範囲を、前記固定部材に対して相対的に、前記第1、第2駆動部が第1方向と前記第1方向に沿う方向とは反対の第2方向とに移動する移動部材と、前記固定部材に対する前記移動部材の移動を検出する検出部と、第1押さえ部材、第2押さえ部材および第3押さえ部材と、前記移動部材の前記第1駆動部と前記第2駆動部との間に配置され、前記第1駆動部によって前記第1押さえ部材を介して前記第1方向に駆動され、前記第2駆動部によって前記第2押さえ部材を介して前記第2方向に駆動される第1弾性部材と、前記第1弾性部材と略同じ方向に伸縮するように配置された第2弾性部材と、を有し、前記第1押さえ部材は、前記第1弾性部材における前記第2方向の端部で且つ前記第2弾性部材における前記第2方向の端部に配置され、前記中立状態においては前記第1駆動部と前記固定部材とに当接し、前記第2押さえ部材は、前記第1弾性部材における前記第1方向の端部に配置され、前記中立状態においては前記第2駆動部に当接し且つ前記固定部材に当接せず、前記第3押さえ部材は、前記第2弾性部材における前記第1方向の端部に配置され、前記中立状態において前記固定部材に当接し且つ、前記第2駆動部に当接しない。
【発明の効果】
【0008】
本技術によれば、移動の検出精度を高めることができる。
【図面の簡単な説明】
【0009】
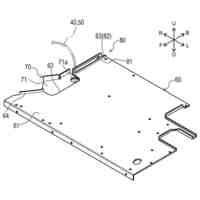
移動検出装置の主要部の斜視図である。
移動検出装置の主要部の斜視図である。
-Z側からみた移動検出装置の要部の模式図である。
A-A線に沿う断面図である。
A-A線に沿う断面図である。
A-A線に沿う断面図である。
【発明を実施するための形態】
【0010】
以下、図面を参照して本技術の実施の形態を説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
東洋電装株式会社
把持状態検出装置およびその制御方法
24日前
株式会社クボタ
作業車
1か月前
アズビル株式会社
電圧出力回路
1か月前
アズビル株式会社
流量制御装置
23日前
ミネベアミツミ株式会社
入力装置
14日前
株式会社エクセディ
作業ロボット
2日前
トヨタ自動車株式会社
自動走行搬送車
22日前
三菱電機株式会社
移動体制御装置
1日前
エイブリック株式会社
ボルテージレギュレータ
22日前
株式会社クボタ
操作機構及び作業車
1か月前
株式会社クボタ
故障診断装置
21日前
株式会社デンソー
制御装置
27日前
日本プラスト株式会社
節度感付加装置
1か月前
岩田工機株式会社
加工装置
1日前
株式会社デンソー
制御装置
27日前
リックス株式会社
状態検出装置
17日前
株式会社デンソー
減圧弁制御装置
1か月前
村田機械株式会社
搬送車システム
7日前
株式会社オリジン
電源装置
1か月前
株式会社GSユアサ
電力変換装置
1か月前
株式会社オリジン
電源装置
1か月前
株式会社デンソー
電子制御装置
1か月前
THK株式会社
編集装置及び編集方法
1か月前
川崎重工業株式会社
要因分析装置及び要因分析方法
27日前
THK株式会社
編集装置及び編集方法
1か月前
株式会社FUJI
暖機運転システムを備えた工作機械
1か月前
東洋電装株式会社
移動検出装置および鞍乗車両
29日前
国立大学法人 名古屋工業大学
パラメータ探索空間算出方法
1か月前
株式会社ディスコ
加工装置
1か月前
村田機械株式会社
走行車システム
1か月前
DMG森精機株式会社
工作機械
1か月前
株式会社デンソー
ペダル装置
27日前
愛三工業株式会社
弁システム
1か月前
株式会社デンソー
ペダル装置
1か月前
多摩川精機株式会社
突入電流防止回路
7日前
八重洲無線株式会社
回動つまみの回動軸への取り付け機構
1か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ